基于人工智能的数据智能采集方法及系统与流程
本发明涉及图像处理,具体涉及一种基于人工智能的数据智能采集方法及系统。
背景技术:
1、随着互联网和图像处理技术的发展,图像信息在人们的生活和工作中起到越来越重要的作用。大部分人工智能相关的科研单位或者学校,如果需要图像数据作为训练数据对神经网络进行训练,就需要采集大量的图像数据,而图像数据的质量的好坏对于神经网络的训练有着至关重要的作用,因此需要对采集的图像数据进行筛选。
2、在采集图像过程中,采集的图像非常容易受到光照等外界因素的影响,而光照在图像会形成一个光照区域,光照区域容易覆盖在图中包含重要信息的目标区域上,这样对于图像的质量就会有很大的影响,因此需要根据光照区域和目标区域的重叠区域的面积对图像的质量进行判断;传统的图像处理中定位重叠区域的方法主要是通过两个区域的两个交点进行定位,但通过对整张图像进行分析可能会得到多个交点,此时就不能准确的得到两个区域重叠部分的交点,也就不能准确的对光照区域和目标区域的重叠区域进行定位,同时图像中其他区域也可能会有重叠部分,也会对光照区域和目标区域的重叠区域的定位造成干扰。
技术实现思路
1、为了解决上述技术问题,本发明的目的在于提供一种方法,所采用的技术方案具体如下:
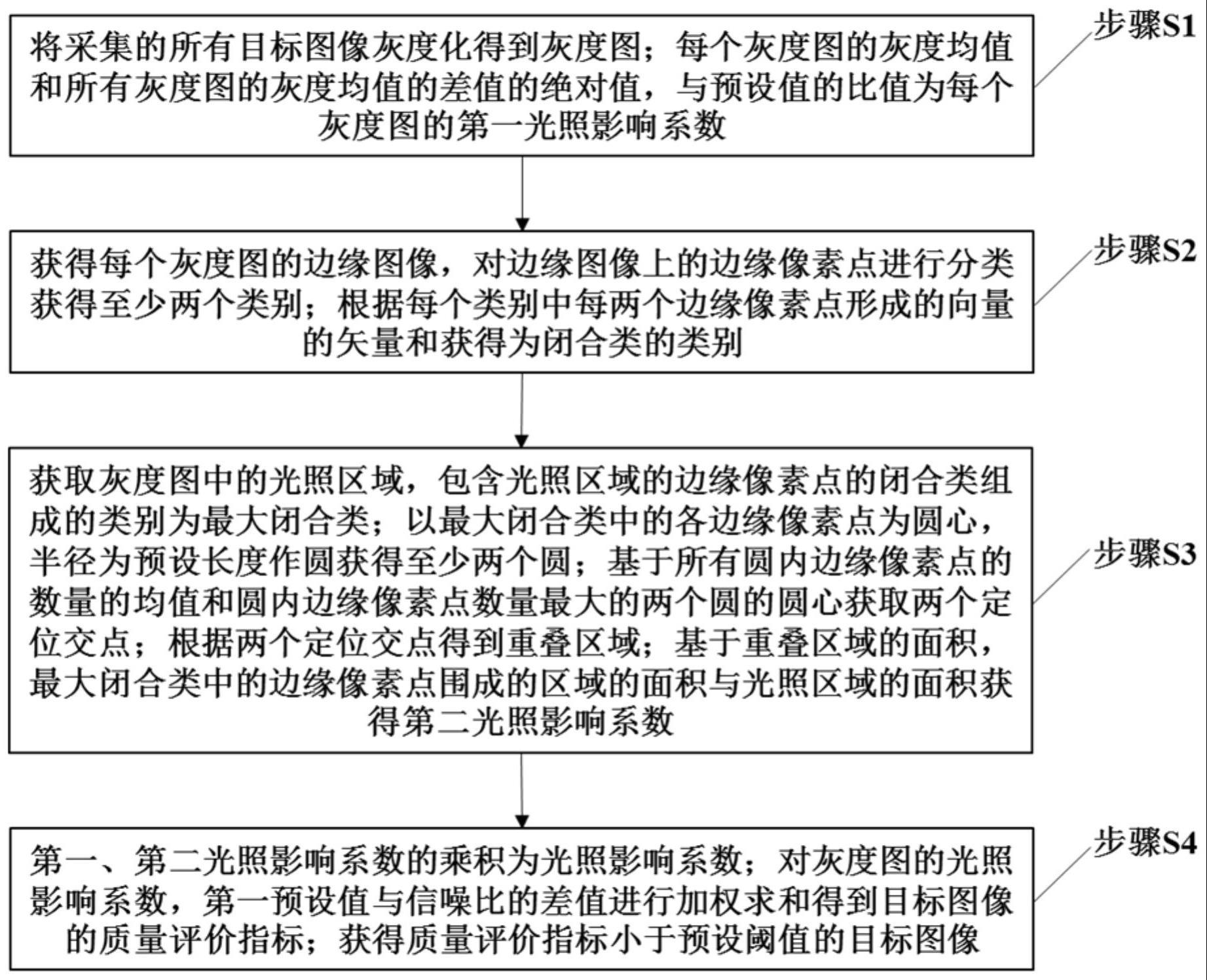
2、第一方面,本发明一个实施例提供了一种基于人工智能的数据智能采集方法:将采集的所有目标图像灰度化得到灰度图;每个灰度图的灰度均值和所有灰度图的灰度均值的差值的绝对值,与预设值的比值为每个灰度图的第一光照影响系数;
3、获得每个灰度图的边缘图像,对边缘图像上的边缘像素点进行分类获得至少两个类别;根据每个类别中每两个边缘像素点形成的向量的矢量和获得为闭合类的类别;
4、获取灰度图中的光照区域,包含光照区域的边缘像素点的闭合类组成的类别为最大闭合类;以最大闭合类中的各边缘像素点为圆心,半径为预设长度作圆获得至少两个圆;基于所有圆内边缘像素点的数量的均值和圆内边缘像素点数量最大的两个圆的圆心获取两个定位交点;根据两个定位交点得到重叠区域;基于重叠区域的面积,最大闭合类中的边缘像素点围成的区域的面积与光照区域的面积获得第二光照影响系数;
5、第一、第二光照影响系数的乘积为光照影响系数;对灰度图的光照影响系数,第一预设值与信噪比的差值进行加权求和得到目标图像的质量评价指标;获得质量评价指标小于预设阈值的目标图像。
6、优选地,对边缘图像上的边缘像素点进行分类获得至少两个类别,包括:任意选择一个边缘像素点为起始点,获得起始点八邻域中的边缘像素点,与起始点归为一类;在与起始点归为一类的边缘像素点中选择一个边缘像素点,获得该边缘像素点八邻域内的边缘像素点与起始点归为一类,以此类推,直到获得的最后一个与起始点归为一类的边缘像素点的八邻域内没有边缘像素点,获得所有与该起始点为一类的边缘像素点,组成一个类别,进而对所有边缘像素点进行分类获得至少两个类别。
7、优选地,根据每个类别中每两个边缘像素点形成的向量的矢量和获得为闭合类的类别,包括:在一个类别的边缘像素点中选择一个边缘像素点作为第一起始点,获得第一起始点八邻域内的边缘像素点并按照顺时针方向进行标号,起始点指向第一个标号的边缘像素点的向量为第一向量,第一个标号的边缘像素点指向第二个边缘像素点的向量为第二向量,以此类推,获得第一起始点八邻域的边缘像素点组成的向量;以第一起始点八邻域内获得的最后一个向量的终点作为第二起始点,同理在第二起始点的八邻域内寻找除了第一起始点邻域内其他边缘像素点进行标号,按照标号的顺序获得向量,以此类推,获得一个类别中每两个边缘像素点组成的向量,求得所述一个类别中每两个边缘像素点组成的向量的矢量和,若所述矢量和为零,则该类别的边缘像素点的类别为闭合类。
8、优选地,基于所有圆内边缘像素点的数量的均值和圆内边缘像素点数量最大的两个圆的圆心获取两个定位交点,包括:获得圆内边缘像素点数量最大的两个圆内的边缘像素点的数量的和,记为第一数量和;若第一数量和大于所有圆内边缘像素点的数量的均值的三倍,则圆内边缘像素点数量最大的两个圆的圆心为两个定位交点。
9、优选地,根据两个定位交点得到重叠区域,包括:在最大闭合类的边缘像素点围成的区域内分别获得四条经过定位交点的边缘线,其中位于两条边缘线之间的边缘线组成的闭合区域为重叠区域。
10、优选地,基于重叠区域的面积,最大闭合类中的边缘像素点围成的区域的面积与光照区域的面积获得第二光照影响系数,包括:获得最大闭合类的边缘像素点围成的区域的面积与光照区域的面积的差值,计算所述差值与重叠区域的面积的和;重叠区域的面积比上所述差值与重叠区域的面积的和的结果为第二光照影响系数。
11、第二方面,本发明还提供了一种基于人工智能的数据智能采集系统,包括存储器、处理器以及存储在存储器上并可在处理器上运行的计算机程序,所述计算机程序被处理器执行时实现一种基于人工智能的数据智能采集系统的步骤。
12、本发明实施例至少具有如下有益效果:本发明通过每个目标图像的灰度图的灰度均值与所有目标图像的灰度图的灰度均值的差值得到了每个灰度图的第一光照影响系数,从灰度方面反映了光照对于目标图像的质量的影响;获得灰度图中的光照区域和最大闭合类的边缘像素点,同时对最大闭合类中各边缘像素点为圆心的圆的特征进行分析获得定位交点,从而定位重叠区域,排除了灰度图中其他边缘像素点对寻找定位交点的影响,使得能够更加准确且快速的找到重叠区域,保证了第二光照系数的准确性;最后综合考虑灰度图的光照影响系数和信噪比获得灰度图的质量评价指标对目标图像的质量进行评价,获得质量评价指标小于预设阈值的目标图像,也即是质量过关的目标图像,保证了采集的图像数据的质量。
技术特征:
1.一种基于人工智能的数据智能采集方法,其特征在于,该方法包括:
2.根据权利要求1所述的一种基于人工智能的数据智能采集方法,其特征在于,所述对边缘图像上的边缘像素点进行分类获得至少两个类别,包括:任意选择一个边缘像素点为起始点,获得起始点八邻域中的边缘像素点,与起始点归为一类;在与起始点归为一类的边缘像素点中选择一个边缘像素点,获得该边缘像素点八邻域内的边缘像素点与起始点归为一类,以此类推,直到获得的最后一个与起始点归为一类的边缘像素点的八邻域内没有边缘像素点,获得所有与该起始点为一类的边缘像素点,组成一个类别,进而对所有边缘像素点进行分类获得至少两个类别。
3.根据权利要求1所述的一种基于人工智能的数据智能采集方法,其特征在于,所述根据每个类别中每两个边缘像素点形成的向量的矢量和获得为闭合类的类别,包括:在一个类别的边缘像素点中选择一个边缘像素点作为第一起始点,获得第一起始点八邻域内的边缘像素点并按照顺时针方向进行标号,起始点指向第一个标号的边缘像素点的向量为第一向量,第一个标号的边缘像素点指向第二个边缘像素点的向量为第二向量,以此类推,获得第一起始点八邻域的边缘像素点组成的向量;以第一起始点八邻域内获得的最后一个向量的终点作为第二起始点,同理在第二起始点的八邻域内寻找除了第一起始点邻域内其他边缘像素点进行标号,按照标号的顺序获得向量,以此类推,获得一个类别中每两个边缘像素点组成的向量,求得所述一个类别中每两个边缘像素点组成的向量的矢量和,若所述矢量和为零,则该类别的边缘像素点的类别为闭合类。
4.根据权利要求1所述的一种基于人工智能的数据智能采集方法,其特征在于,所述基于所有圆内边缘像素点的数量的均值和圆内边缘像素点数量最大的两个圆的圆心获取两个定位交点,包括:获得圆内边缘像素点数量最大的两个圆内的边缘像素点的数量的和,记为第一数量和;若第一数量和大于所有圆内边缘像素点的数量的均值的三倍,则圆内边缘像素点数量最大的两个圆的圆心为两个定位交点。
5.根据权利要求1所述的一种基于人工智能的数据智能采集方法,其特征在于,所述根据两个定位交点得到重叠区域,包括:在最大闭合类的边缘像素点围成的区域内分别获得四条经过定位交点的边缘线,其中位于两条边缘线之间的边缘线组成的闭合区域为重叠区域。
6.根据权利要求1所述的一种基于人工智能的数据智能采集方法,其特征在于,所述基于重叠区域的面积,最大闭合类中的边缘像素点围成的区域的面积与光照区域的面积获得第二光照影响系数,包括:获得最大闭合类的边缘像素点围成的区域的面积与光照区域的面积的差值,计算所述差值与重叠区域的面积的和;重叠区域的面积比上所述差值与重叠区域的面积的和的结果为第二光照影响系数。
7.一种基于人工智能的数据智能采集系统,包括存储器、处理器以及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1-6任一项所述的一种基于人工智能的数据智能采集方法的步骤。
技术总结
本发明涉及图像处理技术领域,具体涉及一种基于人工智能的数据智能采集方法及系统。该方法包括:将采集的所有目标图像灰度化得到灰度图;得到每个灰度图的第一光照影响系数;基于所有圆内边缘像素点的数量的均值和圆内边缘像素点数量最大的两个圆的圆心获取两个定位交点,进而得到重叠区域;基于重叠区域的面积,最大闭合类中的边缘像素点围成的区域的面积与光照区域的面积获得第二光照影响系数;第一、第二光照影响系数的乘积为光照影响系数;对灰度图的光照影响系数,第一预设值与信噪比的差值进行加权求和得到目标图像的质量评价指标;获得质量评价指标小于预设阈值的目标图像。本发明能够筛选出质量好的目标图像,组成目标图像数据集。
技术研发人员:艾合麦提·麦麦提,黄俞鑫,蒲夏雷
受保护的技术使用者:新疆青卫舜源信息科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!