增强的目标检测的制作方法
本公开涉及车辆中的传感器的增强的目标检测。
背景技术:
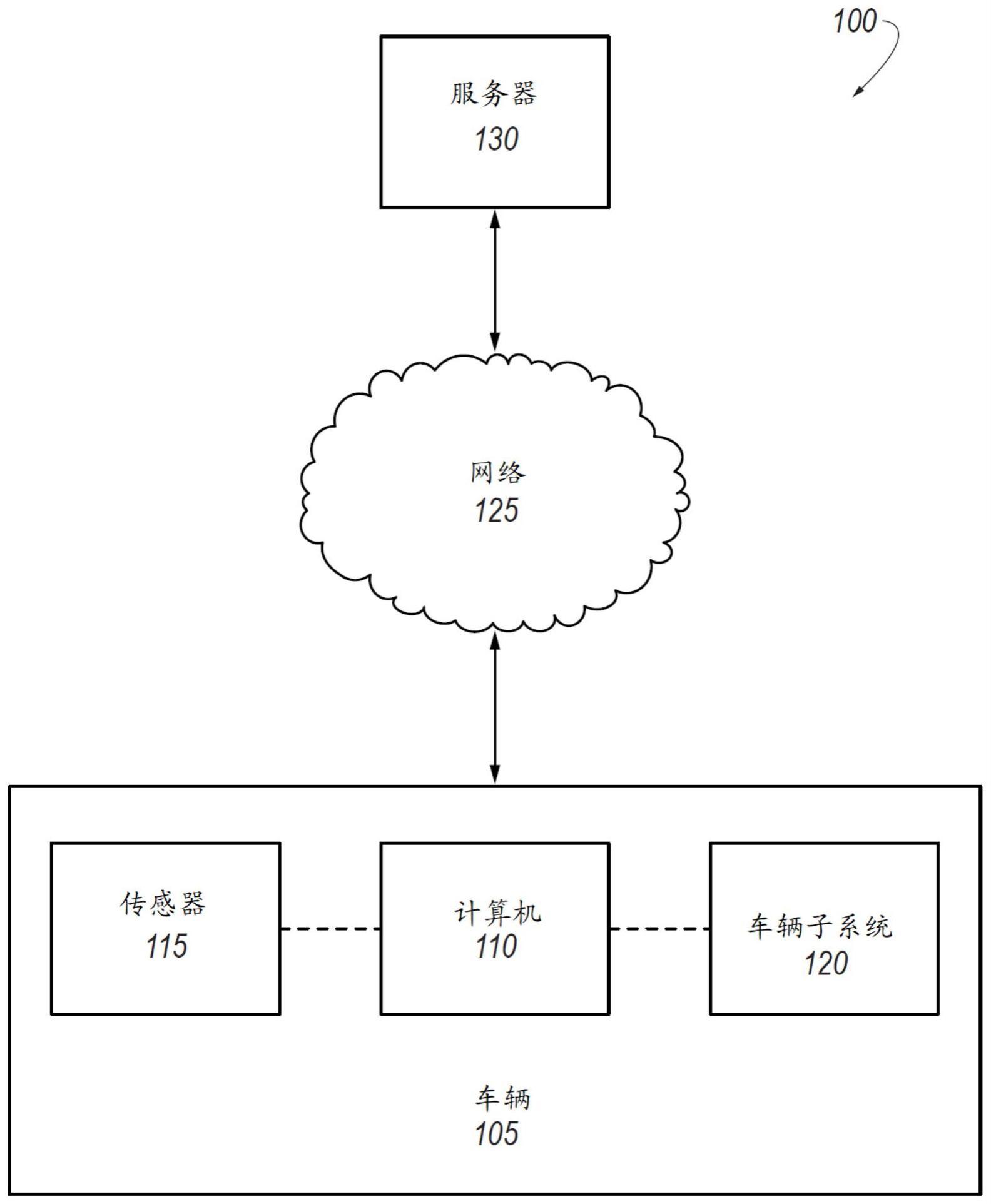
1、车辆可以配备有计算装置、网络、传感器和控制器以获取关于车辆的环境的数据并且基于所述数据来操作车辆。车辆传感器可以提供关于道路上的对象(诸如其他车辆)的数据。在车辆正在道路上进行操作时,车辆的操作可以基于获取关于对象的准确且及时的数据。
技术实现思路
1、本文公开了一种方法,所述方法包括:将图像数据输入到用基于主车辆与目标对象之间的距离的虚拟边界模型和基于真实世界物理模型的损失函数训练的机器学习程序,从所述机器学习程序输出对威胁对象的识别,以及基于对所述威胁对象的所述识别来致动所述主车辆的子系统。所述损失函数可包括对所述主车辆与多个目标中的每一者之间的相应距离进行求和的距离相关项。当所述主车辆与所述多个目标中的每一者之间的所述相应距离增加时,所述距离相关项可增大。可将所述图像数据输入到图像处理程序以确定所述主车辆与所述多个目标中的每一者之间的所述相应距离。可基于收集的传感器数据来确定所述主车辆与所述多个目标中的每一者之间的所述相应距离。可从所述机器学习程序输出威胁数,所述威胁数指示所述主车辆到达所述威胁对象的可能性,并且基于所输出的威胁数来致动所述子系统。
2、所述虚拟边界模型可进一步基于所述主车辆到所述目标对象的接近速度。可将所述图像数据输入到所述虚拟边界模型,确定所述机器学习程序的所述输出与所述虚拟边界模型的输出之间的差异,并且当所述差异低于差异阈值时,致动所述子系统。可将所述图像数据输入到所述虚拟边界模型,以确定所述机器学习程序的所述输出与所述虚拟边界模型的输出之间的差异,并且当所述差异低于差异阈值时,致动所述子系统。机器学习程序可以是递归神经网络。对所述机器学习程序的所述训练可包括当所述目标对象违反所述虚拟边界模型的约束时,识别所述目标对象以进行威胁评估。所述机器学习程序可进一步用包括所述主车辆和指示一个或多个目标对象是否为威胁对象的注释的图像的训练数据集来进行训练。所述机器学习程序可包括布置成层的多个节点。训练所述机器学习程序可包括在所述机器学习程序中反向传播损失函数以确定权重和偏差。
3、还公开了一种计算机可读介质,所述计算机可读介质存储用于执行上述方法步骤中的部分或全部的程序指令。还公开了一种被编程用于执行上述方法步骤中的部分或全部的计算机,所述计算机包括计算机设备,所述计算机设备被编程为:将图像数据输入到用基于主车辆与目标对象之间的距离的虚拟边界模型和基于真实世界物理模型的损失函数训练的机器学习程序,从所述机器学习程序输出对威胁对象的识别,以及基于对所述威胁对象的所述识别来致动所述主车辆的子系统。所述损失函数可包括对所述主车辆与多个目标中的每一者之间的相应距离进行求和的距离相关项。当所述主车辆与所述多个目标中的每一者之间的所述相应距离增加时,所述距离相关项可增大。可将所述图像数据输入到图像处理程序以确定所述主车辆与所述多个目标中的每一者之间的所述相应距离。可基于收集的传感器数据来确定所述主车辆与所述多个目标中的每一者之间的所述相应距离。可从所述机器学习程序输出威胁数,所述威胁数指示所述主车辆到达所述威胁对象的可能性,并且基于所输出的威胁数来致动所述子系统。
4、所述指令可包括用于使所述虚拟边界模型进一步基于所述主车辆到所述目标对象的接近速度的另外的指令。可将所述图像数据输入到所述虚拟边界模型,确定所述机器学习程序的所述输出与所述虚拟边界模型的输出之间的差异,并且当所述差异低于差异阈值时,致动所述子系统。可将所述图像数据输入到所述虚拟边界模型,以确定所述机器学习程序的所述输出与所述虚拟边界模型的输出之间的差异,并且当所述差异低于差异阈值时,致动所述子系统。机器学习程序可以是递归神经网络。对所述机器学习程序的所述训练可包括当所述目标对象违反所述虚拟边界模型的约束时,识别所述目标对象以进行威胁评估。所述机器学习程序可进一步用包括所述主车辆和指示一个或多个目标对象是否为威胁对象的注释的图像的训练数据集来进行训练。所述机器学习程序可包括布置成层的多个节点。训练所述机器学习程序可包括在所述机器学习程序中反向传播损失函数以确定权重和偏差。
技术特征:
1.一种方法,其包括:
2.如权利要求1所述的方法,其中所述损失函数包括对所述主车辆与多个目标中的每一者之间的相应距离进行求和的距离相关项。
3.如权利要求2所述的方法,其中当所述主车辆与所述多个目标中的每一者之间的所述相应距离增加时,所述距离相关项增大。
4.如权利要求2所述的方法,其还包括将所述图像数据输入到图像处理程序以确定所述主车辆与所述多个目标中的每一者之间的所述相应距离。
5.如权利要求2所述的方法,其还包括基于收集的传感器数据来确定所述主车辆与所述多个目标中的每一者之间的所述相应距离。
6.如权利要求1所述的方法,其还包括从所述机器学习程序输出威胁数,所述威胁数指示所述主车辆到达所述威胁对象的可能性,以及基于所输出的威胁数来致动所述子系统。
7.如权利要求1所述的方法,其中所述虚拟边界模型进一步基于所述主车辆到所述目标对象的接近速度。
8.如权利要求1所述的方法,其还包括将所述图像数据输入到所述虚拟边界模型,确定所述机器学习程序的所述输出与所述虚拟边界模型的输出之间的差异,以及当所述差异低于差异阈值时,致动所述子系统。
9.如权利要求1所述的方法,其还包括将所述图像数据输入到所述虚拟边界模型,以确定所述机器学习程序的所述输出与所述虚拟边界模型的输出之间的差异,以及当所述差异低于差异阈值时,致动所述子系统。
10.如权利要求1所述的方法,其中所述机器学习程序是递归神经网络。
11.如权利要求1所述的方法,其中对所述机器学习程序的所述训练包括当所述目标对象违反所述虚拟边界模型的约束时,识别所述目标对象以进行威胁评估。
12.如权利要求1所述的方法,其中所述机器学习程序进一步用包括所述主车辆和指示一个或多个目标对象是否为威胁对象的注释的图像的训练数据集来进行训练。
13.如权利要求1所述的方法,其中所述机器学习程序包括布置成层的多个节点。
14.如权利要求1所述的方法,其中训练所述机器学习程序包括在所述机器学习程序中反向传播损失函数以确定权重和偏差。
15.一种系统,其包括被编程为执行权利要求1至14中任一项所述的方法的计算机。
技术总结
本公开提供了“增强的目标检测”。图像数据被输入到机器学习程序。用基于主车辆与目标对象之间的距离的虚拟边界模型和基于真实世界物理模型的损失函数来训练所述机器学习程序。从所述机器学习程序输出对威胁对象的识别。基于对所述威胁对象的所述识别来致动所述主车辆的子系统。
技术研发人员:S·巴斯卡尔,尼基塔·斋普里亚,金尼什·简,维迪亚·纳里亚曼特穆拉里,什里亚莎·波德尔
受保护的技术使用者:福特全球技术公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!