一种自适应标定系统的制作方法
本发明涉及计算机视觉,具体地,涉及一种自适应标定系统。
背景技术:
1、在机器视觉领域,标定板被广泛应用于对机器视觉的标定。标定板主要采用棋盘格的形式进行标定,并在后来逐步引入二维码以提升信息密度,提高精度。
2、在实际应用中,由于标定对象不同,被测对象的视野大小不同,在标定过程中,就需要制作大小不一的标定板和与之匹配的算法,导致硬件成本提高,同时加大了开发和维护成本。为了解决上述问题,出现了在同一标定板上排列出尺寸依次变化的多个标定点,从而使得不同的标定对象均可以获取到标定板的信息,实现一种标定板对多种不同标定对象的适用。
3、但是上述方案中信息密度较低,只能用于相机固定条件下的标定,无法实现机器人在行进过程中的测量与标定。
4、以上背景技术内容的公开仅用于辅助理解本发明的发明构思及技术方案,其并不必然属于本专利申请的现有技术,在没有明确的证据表明上述内容在本专利申请的申请日已经公开的情况下,上述背景技术不应当用于评价本申请的新颖性和创造性。
技术实现思路
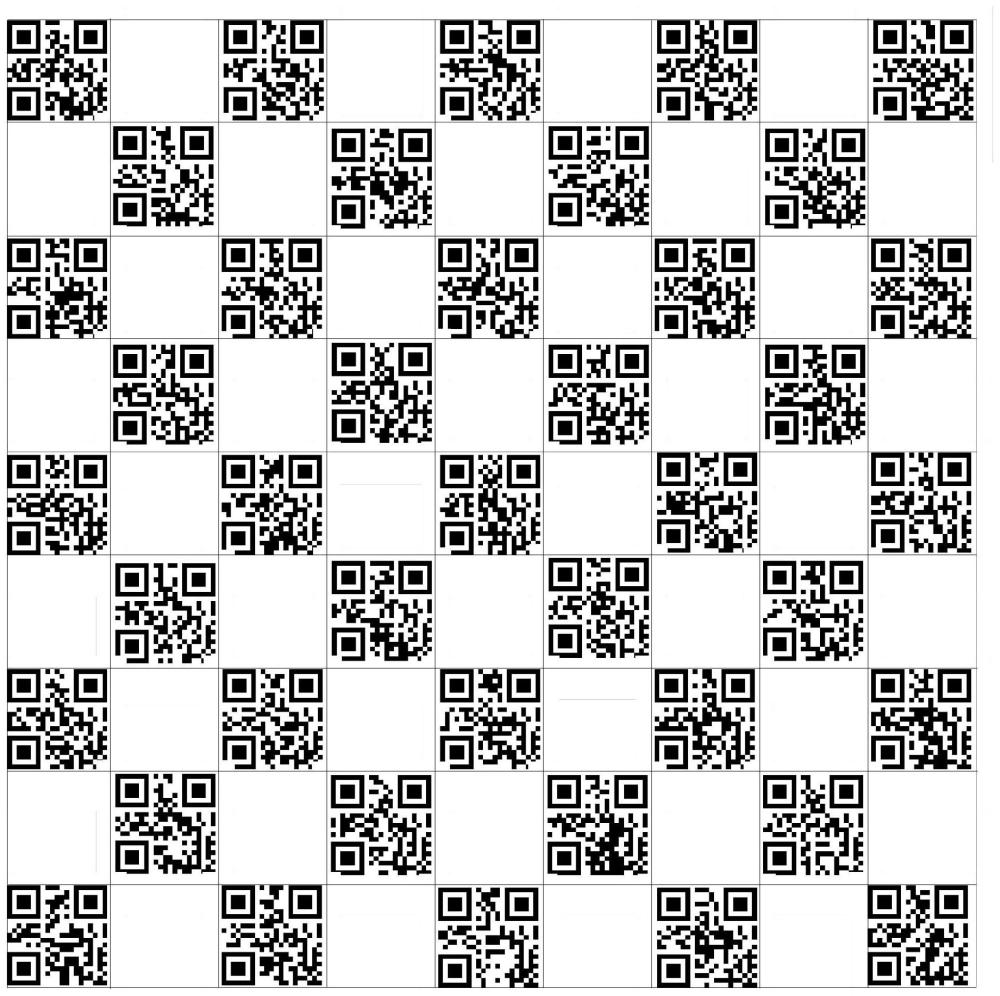
1、为此,本发明通过设置棋盘格、第一二维码和第二维码实现三级定位,从而实现大面积范围内的多级定位,使得不同视野的标定对象均可以获得较高密度的定位信息,从而实现标定对象在行进过程中的精确定位。
2、本发明提供一种自适应标定系统,其特征在于,包括:
3、一种自适应标定系统,其特征在于,包括:
4、多层次标定板,包括不同尺寸的定位标识,以提供至少三级定位;
5、成像装置,用于采集所述多层次标定板的图像数据并对所述图像数据进行处理完成标定过程。
6、可选地,所述的一种自适应标定系统,其特征在于,所述多层次标定板表面设置有:
7、第一定位单元,用于提供第一级定位;
8、第二定位单元,用于提供第二级定位,并且一个所述第二定位单元位于所述第一定位单元的标定单元内;
9、第三定位单元,用于提供第三级定位,并且一个所述第三定位单元位于所述第二定位单元的标定单元内。
10、可选地,所述的一种自适应标定系统,其特征在于,所述第二定位单元和所述第三定位单元具有相同的方向。
11、可选地,所述的一种自适应标定系统,其特征在于,多个所述第三定位单元与所述第二定位单元共用定位块。
12、可选地,所述的一种自适应标定系统,其特征在于,所述第二定位单元包含所述第一定位单元信息,所述第三定位单元包含所述第二定位单元信息。
13、可选地,所述的一种自适应标定系统,其特征在于,所述第三定位单元位于所述第二定位单元的定位块内。
14、可选地,所述的一种自适应标定系统,其特征在于,所述第三定位单元位于所述第二定位单元的编码区内。
15、可选地,所述的一种自适应标定系统,其特征在于,所述第一级定位、所述第二级定位和所述第三级定位均用于确定在当前空间中的位置。
16、可选地,所述的一种自适应标定系统,其特征在于,所述第一定位单元、所述第二定位单元和所述第三定位单元为圆形、椭圆、方形、三角形或多边形。
17、可选地,所述的一种自适应标定系统,其特征在于,所述第一定位单元、所述第二定位单元和所述第三定位单元的形状不同。
18、与现有技术相比,本发明具有如下的有益效果:
19、本发明通过不同级别设置,标定板具有三级定位,可以满足各种不同视野的标定对象的范围,使得标定对象在行进过程中总能捕捉到清晰、可靠的定位信息。
20、本发明的标定板具有较高的信息密度,可以提供多种位置、多种角度的拍摄信息,保证在全方位均可实现准确定位。
21、本发明的标定板以大面积平铺的方式设置时,可以同时对多个不同类型、视野的标定对象进行定位,可以大幅提高标定的效率与定位的准确性,有利于效率的提升。
技术特征:
1.一种自适应标定系统,其特征在于,包括:
2.根据权利要求1所述的一种自适应标定系统,其特征在于,所述多层次标定板表面设置有:
3.根据权利要求2所述的一种自适应标定系统,其特征在于,所述第二定位单元和所述第三定位单元具有相同的方向。
4.根据权利要求2所述的一种自适应标定系统,其特征在于,多个所述第三定位单元与所述第二定位单元共用定位块。
5.根据权利要求2所述的一种自适应标定系统,其特征在于,所述第二定位单元包含所述第一定位单元信息,所述第三定位单元包含所述第二定位单元信息。
6.根据权利要求2所述的一种自适应标定系统,其特征在于,所述第三定位单元位于所述第二定位单元的定位块内。
7.根据权利要求2所述的一种自适应标定系统,其特征在于,所述第三定位单元位于所述第二定位单元的编码区内。
8.根据权利要求2所述的一种自适应标定系统,其特征在于,所述第一级定位、所述第二级定位和所述第三级定位均用于确定在当前空间中的位置。
9.根据权利要求2所述的一种自适应标定系统,其特征在于,所述第一定位单元、所述第二定位单元和所述第三定位单元为圆形、椭圆、方形、三角形或多边形。
10.根据权利要求9所述的一种自适应标定系统,其特征在于,所述第一定位单元、所述第二定位单元和所述第三定位单元的形状不同。
技术总结
一种自适应标定系统,其特征在于,包括:多层次标定板,包括不同尺寸的定位标识,以提供至少三级定位;成像装置,用于采集所述多层次标定板的图像数据并对所述图像数据进行处理完成标定过程。本发明通过设置棋盘格、第一二维码和第二维码实现三级定位,从而实现大面积范围内的多级定位,使得不同视野的标定对象均可以获得较高密度的定位信息,从而实现标定对象在行进过程中的精确定位。
技术研发人员:杨煦,黄龙祥,侯俊峰,汪博,朱力,吕方璐
受保护的技术使用者:深圳市光鉴科技有限公司
技术研发日:
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!