一种无人机机群协同机载计算的大场景密集3D环境感知软件的制作方法
1.本技术属于中小型旋翼无人机集群智能领域中的一块,即:旋翼无人机集群依靠机载计算、协同感知大场景密集高清3d环境。
背景技术:
0、2.背景技术
1、多约束条件下,旋翼uavs、陌生(室内)环境、无gps、依靠视觉感知3d密集环境、220v电力缺失、去中心化、面向未来战争的3d cpp问题,有很多研究要做。
2、由于单个中小型无人机存在以下缺点:载荷能力有限、低功耗、计算能力有限等,难以支持其独立完成任务。所以,中小型无人机朝着轻量级、低成本、协同集群的趋势发展。
3、美国空军2016年发布《小型无人机系统(suas)飞行规划2016-2036》[1],分析了小型无人机的优势和定位,从战略层面肯定了中小型无人机系统的前景和价值[2]。
4、但是,依据美国空军2005年发布《无人机系统线路图2005-2030[3]》的无人机自主等级,人类目前还没有实现“10级完全自主集群”技术[4][5][6][7]。
5、单机自主:1级(遥控引导)、2级(实时故障诊断)、3级(故障自修复与飞行环境自适应)和4级(航路实时重规划)。
6、多机自主:5级(多机协同)、6级(多机战术重规划)和7级(多机战术目标)。
7、集群自主:8级(分布式协同控制)、9级(集群战略目标)和10级(完全自主集群)。协同集群uavs的组织方式有两种:集中中心化、分布式去中心化。
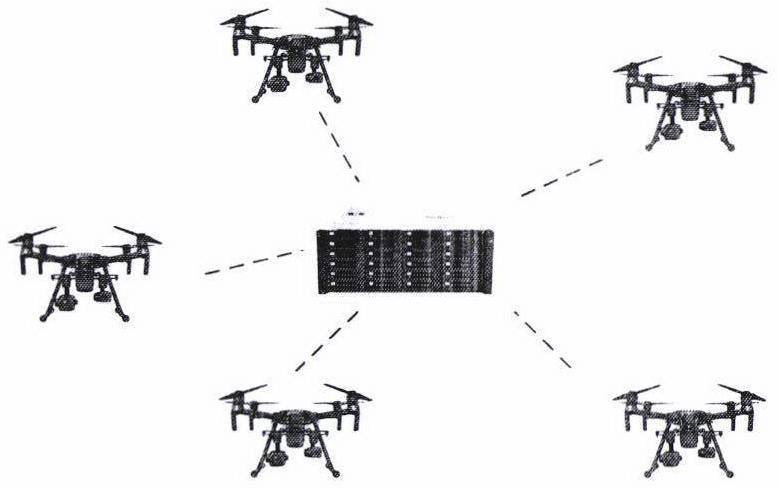
8、集中中心化:由一个中心服务器收集多uavs的信息并承担耗时的计算任务,如图1所示。但是,一旦中心服务器出现问题则代表任务失败。uav的反应速度受其到中心服务器的通信距离、服务器的计算速度影响。中心服务器往往体积较大、电力要求高、散热大。
9、分布式、去中心化:没有地面中心服务器或者云端、边缘计算服务器,仅有集群uavs。每个uav仅依靠机载有限的自主决策与局部的感知、互相通信能力,达到集群个体间无中心式地协同、轻量化集群自主行为,如图2所示。
10、分布式、去中心化的多uavs组织方式具有不可忽视的优势和应用价值,比如:
11、(1)在相同通信能力下,搜索范围比集中式更广、更灵活、计算耗时更少[6]。
12、(2)由于没有中心服务器,战时士兵携带方便、对电力要求也较少,便携充电电池即可。而集中式、大型服务器却意味着必须找到220v供电场所,并且散热高、噪声大。
13、然而,在面向实战、面向未来、以及严酷战场环境约束条件下,多uavs分布式、去中心化的集群自主智能仍然面临很大的挑战。目前国内外学术界对多uavs去中心化集群智能的研究成果非常少,并没有完全解决此类问题[4][5][6]。
14、本专利目的:
15、本专利旨在填补国内外对这一背景问题的工程、研究空白。针对多约束环境,无gps、陌生环境、缺乏220v电力支持、uavs数量变化、待搜索目标数量未知、缺乏遥控能力、超低空3d环境、没有地面或者云端服务器的情况下,依靠uavs机载gpu并行计算,实现去中心化协同地3d密集视觉环境感知。
16、3.
技术实现要素:
17、本发明在现有最新技术的基础之上,比如端到端5g网络通信技术(device todevice 5g network)、精度较高的imu惯性导航技术,提出:
18、多uavs去中心化的、机载gpu并行双目图像无缝拼接算法和软件:
19、这是因为是超低空3d全覆盖航迹规划,所以不能将3d空间压缩至2d平面进行处理。同时,多visual-uavs在陌生3d环境飞行时,机载相机拍摄到的视场可能由大到小、由小到大、以及不同的缩放变形、遇到动态移动的人和物等。
20、这项技术包含两个方面:
21、(1)单uav机载gpu双目图像无缝拼接:移动相机、动态场景下、连续两帧双目2d图像的gpu并行无缝拼接,构建密集3d地图;
22、(2)多uavs去中心化协同的双目图像拼接:多uavs分布式组网传递数据、局部和全景多分辨率图像的gpu并行拼接。
技术实现思路
技术特征:
1.使用申请人提出的gpu并行2d/3d cellular matrix模型用于gpu并行图像拼接算法。
2.本发明提出的基于line-meetapap算法、动态场景缝合线算法与gpu 2d cellularmatrix相互结合的双目图像拼接算法。
3.本发明提出的多uavs分布式、去中心协同图像拼接方法。
技术总结
在无GNSS的未知、超低空环境,以及多约束条件下,比如缺乏220v电力支持、无人机群(UAVs)数量变化、待搜索目标数量未知、缺乏遥控能力、没有地面或者云端服务器的情况下,实现“去中心化非编队飞行的低慢小同质视觉无人机群”协同构建“3D稠密地图”是集群自主智能的一个研究前沿。本专利以机载国产GPU在线并行计算为基础,提出多UAVs去中心化协同的数据传递方案,建立多UAVs去中心化构建3D稠密环境的协同方案,并提出基于每架UAV机载单卡GPU,实现多UAVs协同的、去中心化的3D稠密环境构建方法。最终达到多UAVs低速飞行时的机载实时构建3D稠密环境的目的。
技术研发人员:乔文豹
受保护的技术使用者:乔文豹
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!