一种基于装配工艺与轨迹自规划的微器件柔性装配方法与流程
本发明涉及一般的控制或调节系统,具体而言,涉及一种基于装配工艺与轨迹自规划的微器件柔性装配方法。
背景技术:
1、多品种是当前复杂微器件生产的重要特征,其对微器件装配技术提出了向柔性化、智能化发展的要求。就目前而言,现有技术通常为针对特定类别微器件的装配进行柔性装配方法的设计,局限性较大,不能满足多品种微器件的装配需求;另外,采用现有技术对于不同结构和装配工艺的微器件进行装配,需要重新调整装配控制流程与方法,不具备根据装配对象自动生成装配工艺的作用,而重新调整装配控制流程与方法不仅调整周期较长,而且快速响应能力较差。基于此,针对上述问题,我们亟需一种能够应用于多品种复杂微器件的柔性装配方法。
技术实现思路
1、本发明的目的在于提供一种基于装配工艺与轨迹自规划的微器件柔性装配方法,根据输入的待装配器件三维模型,获取对应的装配控制指令流执行装配操作,解决了不同结构和装配工艺的微器件进行装配,需要重新调整装配控制流程与方法的问题,同时实现了高效柔性化装配,提高多品种微器件的装配生产效率的效果。
2、本发明的实施例通过以下技术方案实现:
3、一种基于装配工艺与轨迹自规划的微零件柔性装配方法,该方法的步骤包括:
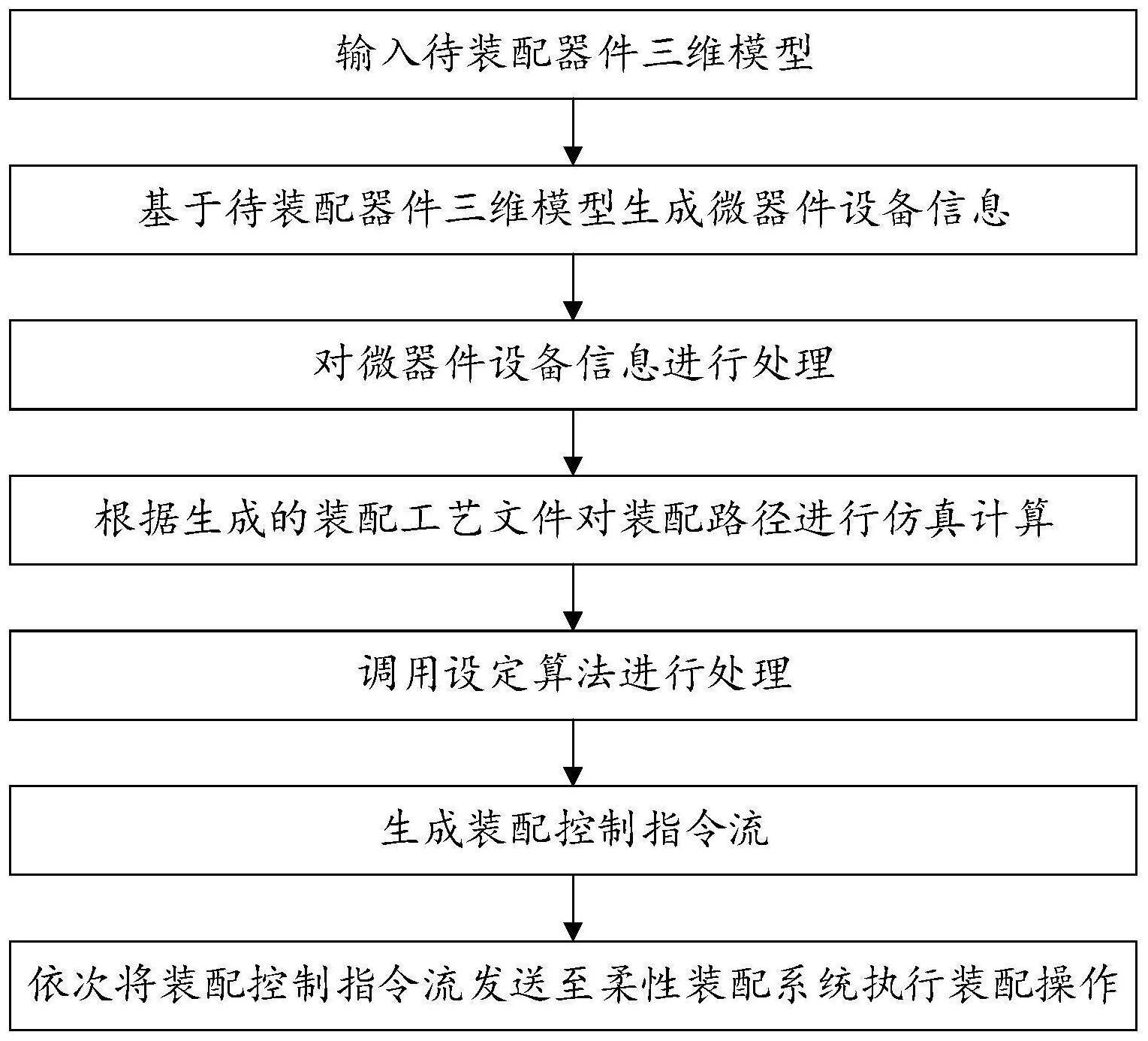
4、输入待装配器件三维模型,基于待装配器件三维模型生成微器件设备信息,对微器件设备信息进行处理,生成装配工艺文件,根据装配工艺文件对装配路径进行仿真计算,形成装配操作控制文件与检测流程控制文件,调用设定算法对装配操作控制文件与检测流程控制文件进行处理,生成装配控制指令流,依次将装配控制指令流发送至柔性装配系统执行装配操作。
5、可选的,微器件设备信息包括微器件产品信息及微器件工艺信息,其中,微器件产品信息包括:产品名称、零件名称、组件名称、几何形状与结构尺寸、材料属性,微器件工艺信息包括:配合特征、精度要求。
6、可选的,所述装配工艺文件的生成过程为:
7、读取微器件设备信息并通过swrl规则推理生成装配层次树,通过设定相似度对装配层次树进行计算,生成装配序列,基于混合整数规划算法并以效率优先为原则对装配序列进行优化,经过优化后,基于关联度矩阵以及设定贡献度选取装配系统工辅具,汇总并生成装配工艺文件。
8、可选的,所述装配系统工辅具包括:执行微操作的机械手、装配机械手、微夹持器、检测光路、上料托盘。
9、可选的,所述装配控制指令流的生成过程为:
10、读取装配工艺文件以获取装配操作信息与装配位置信息,根据装配操作信息调用动作函数进行处理,形成装配操作流程信息,根据装配位置信息采用adams对柔性装配系统进行无碰撞轨迹仿真计算,求得装配运动轨迹数据,结合装配操作流程信息、装配位置信息与装配运动轨迹数据,形成装配操作控制文件与检测流程控制文件,经处理后,生成装配控制指令流,依次将装配控制指令流发送至柔性装配系统执行装配操作。
11、可选的,所述装配操作控制文件包括:装配操作编号、动作名称与时序、运动起始点位置与轨迹、运动参数信息,上料台编号、上料工位号、夹持器编号、取夹持器工位号、夹持动作时序。
12、可选的,所述检测流程控制文件包括:检测光路编号、检测特征信息、检测方式与算法信息、光源强度。
13、可选的,所述装配工艺文件具体为电子表格的格式。
14、可选的,所述柔性装配系统包括:隔震平台、上料模块、微操作机械手、平台基座、零件操作模块、水平显微视觉模块、垂直显微视觉模块;所述上料模块、微操作机械手、平台基座、零件操作模块、水平显微视觉模块、垂直显微视觉模块分别固定布设在隔震平台顶部的各个区域。
15、可选的,所述上料模块具体设置有多个,且各个上料模块对应固定布设在所述隔震平台的各个角落。
16、本发明实施例的技术方案至少具有如下优点和有益效果:
17、本实施例根据输入的待装配器件三维模型,获取对应的装配控制指令流执行装配操作,能够有效解决不同结构和装配工艺的微器件进行装配,需要重新调整装配控制流程与方法以及调整周期长、智能化程度低等问题,能够实现小批量、多品种微器件的柔性化、智能化自动装配,提高多品种微器件的装配生产效率的效果。
技术特征:
1.一种基于装配工艺与轨迹自规划的微器件柔性装配方法,其特征在于,该方法的步骤包括:
2.根据权利要求1所述的基于装配工艺与轨迹自规划的微器件柔性装配方法,其特征在于,微器件设备信息包括微器件产品信息及微器件工艺信息,其中,微器件产品信息包括:产品名称、零件名称、组件名称、几何形状与结构尺寸、材料属性,微器件工艺信息包括:配合特征、精度要求。
3.根据权利要求2所述的基于装配工艺与轨迹自规划的微器件柔性装配方法,其特征在于,所述装配工艺文件的生成过程为:
4.根据权利要求3所述的基于装配工艺与轨迹自规划的微器件柔性装配方法,其特征在于,所述装配系统工辅具包括:执行微操作的机械手、装配机械手、微夹持器、检测光路、上料托盘。
5.根据权利要求2所述的基于装配工艺与轨迹自规划的微器件柔性装配方法,其特征在于,所述装配控制指令流的生成过程为:
6.根据权利要求5所述的基于装配工艺与轨迹自规划的微器件柔性装配方法,其特征在于,所述装配操作控制文件包括:装配操作编号、动作名称与时序、运动起始点位置与轨迹、运动参数信息,上料台编号、上料工位号、夹持器编号、取夹持器工位号、夹持动作时序。
7.根据权利要求5所述的基于装配工艺与轨迹自规划的微器件柔性装配方法,其特征在于,所述检测流程控制文件包括:检测光路编号、检测特征信息、检测方式与算法信息、光源强度。
8.根据权利要求1-7所述的基于装配工艺与轨迹自规划的微器件柔性装配方法,其特征在于,所述装配工艺文件具体为电子表格的格式。
9.根据权利要求1所述的基于装配工艺与轨迹自规划的微器件柔性装配方法,其特征在于,所述柔性装配系统包括:隔震平台(1)、上料模块(2)、微操作机械手(3)、平台基座(4)、零件操作模块(5)、水平显微视觉模块(6)、垂直显微视觉模块(7);所述上料模块(2)、微操作机械手(3)、平台基座(4)、零件操作模块(5)、水平显微视觉模块(6)、垂直显微视觉模块(7)分别固定布设在隔震平台(1)顶部的各个区域。
10.根据权利要求9所述的基于装配工艺与轨迹自规划的微器件柔性装配方法,其特征在于,所述上料模块(2)具体设置有多个,且各个上料模块(2)对应固定布设在所述隔震平台(1)的各个角落。
技术总结
本发明涉及一般的控制或调节系统技术领域,具体而言,涉及一种基于装配工艺与轨迹自规划的微器件柔性装配方法,该方法的步骤包括:输入待装配器件三维模型,基于待装配器件三维模型生成微器件设备信息,对微器件设备信息进行处理,生成装配工艺文件,根据装配工艺文件对装配路径进行仿真计算,形成装配操作控制文件与检测流程控制文件,调用设定算法对装配操作控制文件与检测流程控制文件进行处理,生成装配控制指令流,依次将装配控制指令流发送至柔性装配系统执行装配操作,直至完成微器件的柔性装配。
技术研发人员:吴文荣,杨毅,毕列,张娟,王大松,程俊森,魏红,杨宏刚,彭博
受保护的技术使用者:中国工程物理研究院激光聚变研究中心
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!