一种大型设备远程操控延时补充方法与流程
本发明涉及远程操控,尤其涉及一种大型设备远程操控延时补充方法。
背景技术:
1、在现有技术中,随着无线远程操控技术的发展,在基于5g技术的基础上,越来越多的大型设备采用无线控制技术,一是能够实现复杂危险环境中的人员保护,二是能够对不适合人类进入的环境中实现资源的勘探以及开采的动作,因为大型设备一般动作的速度缓慢,可以很好的避免远程操控时所带来的的延时问题,但由于设备属于大型类,远程操控即使动作缓慢,也需要动作的连贯性,否则很容易产生危险。而现有的解决办法大多数都是单纯的依靠加强网络建设以及保持网络的持续连续供网来解决此问题,可依然会受网络基站、卫星、天气以及大型设备所处地的影响,一旦出现网络延时或者断网,则很容易使得大型设备受损,且损失不可估量。
技术实现思路
1、基于现有的大型设备远程操控单纯依靠网络支撑的单一保障路径的技术问题,本发明提出了一种大型设备远程操控延时补充方法。
2、本发明提出的一种大型设备远程操控延时补充方法,包括以下步骤:
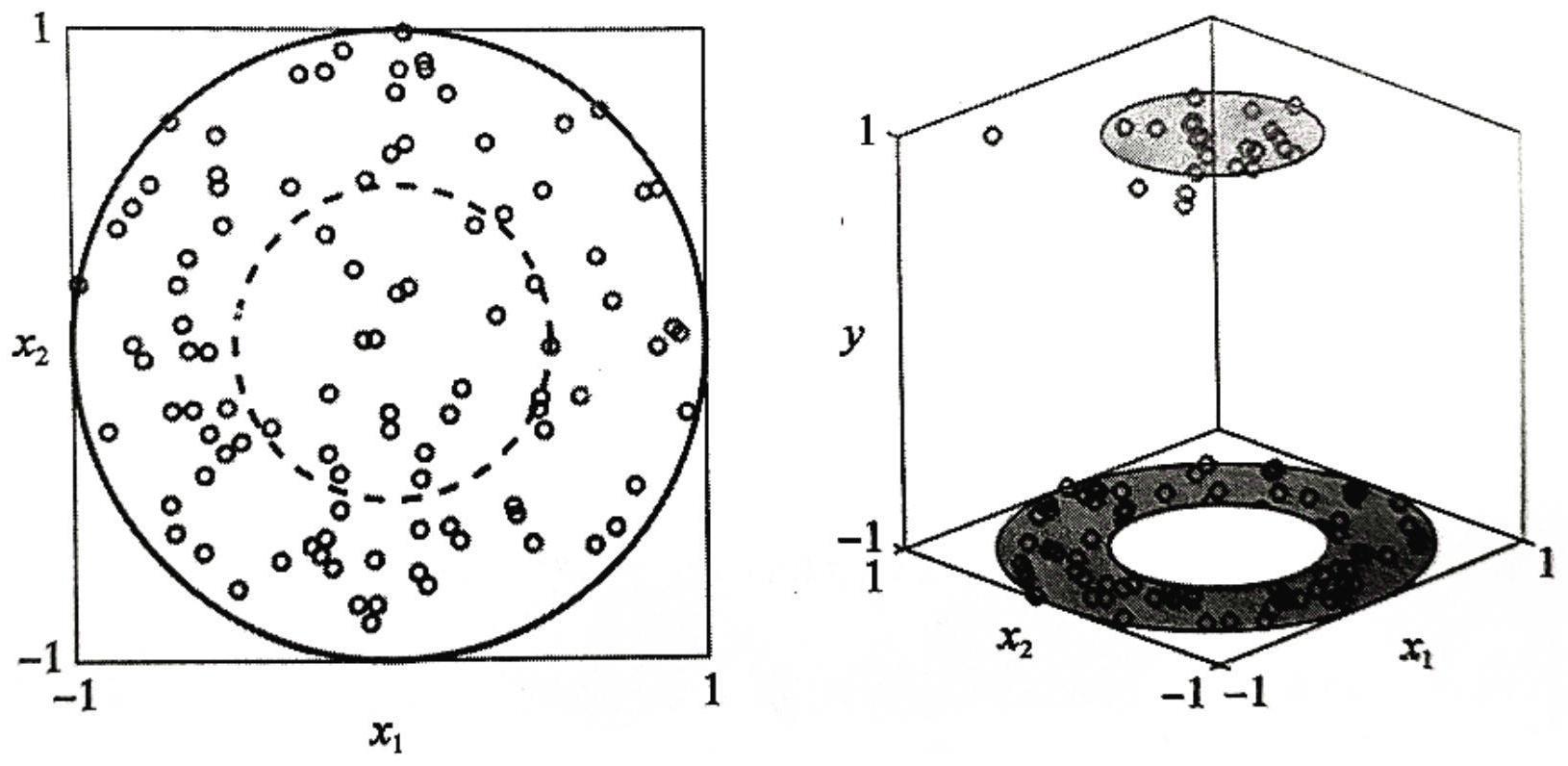
3、步骤一、操控原型数据集建立,通过在单位圆内采样数据生成;具体数据集的形成包括对大型设备在线或手动操控时数据的收集。
4、步骤二、分段连续函数逼近,其中输入特征和输出具有明确的非线性关系,以此来将大型设备的操控数据进行线性分段分类,使得各数据点无限向线性分段连续函数逼近。
5、步骤三、操控指示函数的形式化定义,用于给无延时的操控集合s的点赋予一个唯一的常数值,以实现相应的逻辑逼近很紧密的匹配了原始指示函数。
6、步骤四、指示函数逼近,用于对无延时操控进行逼近。
7、步骤五、获取权重,将函数离散化,应用于真实的无延时大型设备远程操控。
8、步骤六、设置神经网络加速器;以此实现神经网络来对数据包进行加速计算动作。
9、优选地,无延时的操控数据包括对大型设备上的液压缸、液压泵以及液压系统所必要的电磁阀,通过对液压缸管路上的压力阀、流量阀来获取液压缸当前活塞杆所处的位置信息数据,再通过控制电磁阀来控制启停动作来实现对大型设备的三维坐标系上的数据信息进行采集或控制。
10、优选地,对大型设备三维坐标系中的动作数据特征进行记忆、提取以及自动设计的动作,其中三维坐标系的动作数据包括液压缸活塞杆的伸出量在操控的关键节点时的压力值、流量值,配合当前的动作轨迹,即可得出当前液压缸位置的操控数据集。
11、优选地,所述步骤一中操作原型数据集建立,通过在单位圆内采样数据生成指示函数
12、
13、而获得无延时的操控数据样本,将大型设备无延时操作设定标签值取自于{-1,1},通过神经网络访问相应的指示函数y(x),利用连续特征基表示。
14、优选地,所述步骤二中数据在单位区间内对数据生成函数y(x)=sin(2πx)的操控有延时采样。
15、步骤二中分段连续函数逼近,分段连续函数由若干连续函数分段组成,各段之间为间隔或跳跃。
16、优选地,所述步骤二中分段连续函数逼近,通过增加基元素的数量m,全面提升如下公式中的逼近:
17、
18、优选地,所述步骤三中给无延时的操控集合s的点赋予一个唯一的常数值,对于其他不在集合s中的点则赋予一个不同的常数值,通过使用+1指示某个点在集合s中,使用-1指示某个点不在集合中,在集合s上将指示函数定义为:
19、
20、由于指示函数是分段的常数,即分段连续函数的一个特殊子类,因此可以使用任意的基和足够大的m来有效逼近它,从而实现对大型设备进行远程无延时操控。
21、优选地,由于步骤四中指示函数在y(x)在±1上取值,因此,在指示函数逼近时,通过加权和代入符号sign(·)中,逼近公式简写为:
22、然后通过逻辑回归,将逻辑函数tanh(at),用于逼近sign(t),指示函数y(x)的逻辑逼近为:
23、
24、优选地,所述步骤五中获取权重包括对每个x,y(x)在{±1}上取值,并进行逻辑回归的softmax代价函数推导为:
25、
26、所述步骤五中获取权重包括调节权重及内部参数,在全部的x上最小化公式中的逻辑逼近,即:
27、
28、优选地,所述步骤六中的神经网络加速器包括体系结构,加速器由输入向量、权重和激活的内存,以及执行神经元计算的多个数据通路通道组成。
29、本发明中的有益效果为:
30、能够对大型设备三维坐标系中的动作数据特征进行记忆、提取以及自动设计的动作,比如液压缸活塞杆的伸出量在操控的关键节点时的压力值、流量值,配合当前的动作轨迹,即可得出当前液压缸位置的操控数据集,当出现远程网络操控出现延时情况时,再反向匹配出原始数据的特征,利用特征的自动设计动作,代替大型设备操控动作的连续性,直至网络正常时,再回归正常。
技术特征:
1.一种大型设备远程操控延时补充方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的一种大型设备远程操控延时补充方法,其特征在于:无延时的操控数据包括对大型设备上的液压缸、液压泵以及液压系统所必要的电磁阀,通过对液压缸管路上的压力阀、流量阀来获取液压缸当前活塞杆所处的位置信息数据,再通过控制电磁阀来控制启停动作来实现对大型设备的三维坐标系上的数据信息进行采集或控制。
3.根据权利要求2所述的一种大型设备远程操控延时补充方法,其特征在于:对大型设备三维坐标系中的动作数据特征进行记忆、提取以及自动设计的动作,其中三维坐标系的动作数据包括液压缸活塞杆的伸出量在操控的关键节点时的压力值、流量值,配合当前的动作轨迹,即可得出当前液压缸位置的操控数据集。
4.根据权利要求1所述的一种大型设备远程操控延时补充方法,其特征在于:所述步骤一中操作原型数据集建立,通过在单位圆内采样数据生成指示函数
5.根据权利要求1所述的一种大型设备远程操控延时补充方法,其特征在于:所述步骤二中数据在单位区间内对数据生成函数y(x)=sin(2πx)的操控有延时采样;
6.根据权利要求5所述的一种大型设备远程操控延时补充方法,其特征在于:所述步骤二中分段连续函数逼近,通过增加基元素的数量m,全面提升如下公式中的逼近:
7.根据权利要求1所述的一种大型设备远程操控延时补充方法,其特征在于:所述步骤三中给无延时的操控集合s的点赋予一个唯一的常数值,对于其他不在集合s中的点则赋予一个不同的常数值,通过使用+1指示某个点在集合s中,使用-1指示某个点不在集合中,在集合s上将指示函数定义为:
8.根据权利要求7所述的一种大型设备远程操控延时补充方法,其特征在于:由于步骤四中指示函数在y(x)在±1上取值,因此,在指示函数逼近时,通过加权和代入符号sign(·)中,逼近公式简写为:
9.根据权利要求8所述的一种大型设备远程操控延时补充方法,其特征在于:所述步骤五中获取权重包括对每个x,y(x)在{±1}上取值,并进行逻辑回归的softmax代价函数推导为:
10.根据权利要求1所述的一种大型设备远程操控延时补充方法,其特征在于:所述步骤六中的神经网络加速器包括体系结构,加速器由输入向量、权重和激活的内存,以及执行神经元计算的多个数据通路通道组成。
技术总结
本发明属于远程操控技术领域,尤其是一种大型设备远程操控延时补充方法,包括以下步骤:步骤一、操控原型数据集建立,通过在单位圆内采样数据生成;具体数据集的形成包括对大型设备在线或手动操控时数据的收集,步骤二、分段连续函数逼近,其中输入特征和输出具有明确的非线性关系,以此来将大型设备的操控数据进行线性分段分类,使得各数据点无限向线性分段连续函数逼近。该大型设备远程操控延时补充方法,能够对大型设备三维坐标系中的动作数据特征进行记忆、提取以及自动设计的动作,比如液压缸活塞杆的伸出量在操控的关键节点时的压力值、流量值,配合当前的动作轨迹,即可得出当前液压缸位置的操控数据集。
技术研发人员:赵小聪,史士杰,陈岑,卢基旺
受保护的技术使用者:归中智能装备(南通)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!