车辆速度预估方法及装置与流程
本发明涉及自动驾驶,尤其涉及一种车辆速度预估方法及装置。
背景技术:
1、在自动驾驶技术中,系统需要通过获取他车的位置和速度,以对他车轨迹进行预测,进而实现自车的路径规划,因此,车辆速度估计成为了自动驾驶中不可缺少的重要功能。由于单目相机具有低成本、语义信息丰富等优势,因此,目前大多利用单目相机进行车辆速度估计,以获取精确的车辆速度估计值。
2、当前业内使用的车辆速度估计方法主要先利用单目测距,再通过卡尔曼滤波计算目标速度。然而单目相机无法直接获取3d信息,容易造成交大的单目3d测距误差,进而影响测速精度;另外,上述方法的速度分辨率不足,难以及时分辨出非静止目标和静止目标,影响驾驶安全。
技术实现思路
1、本发明提供一种车辆速度预估方法及装置,用以解决现有技术中测速精度较差的缺陷,实现了单目测速与3d测距的部分解耦,提高测速精度,确保驾驶安全。
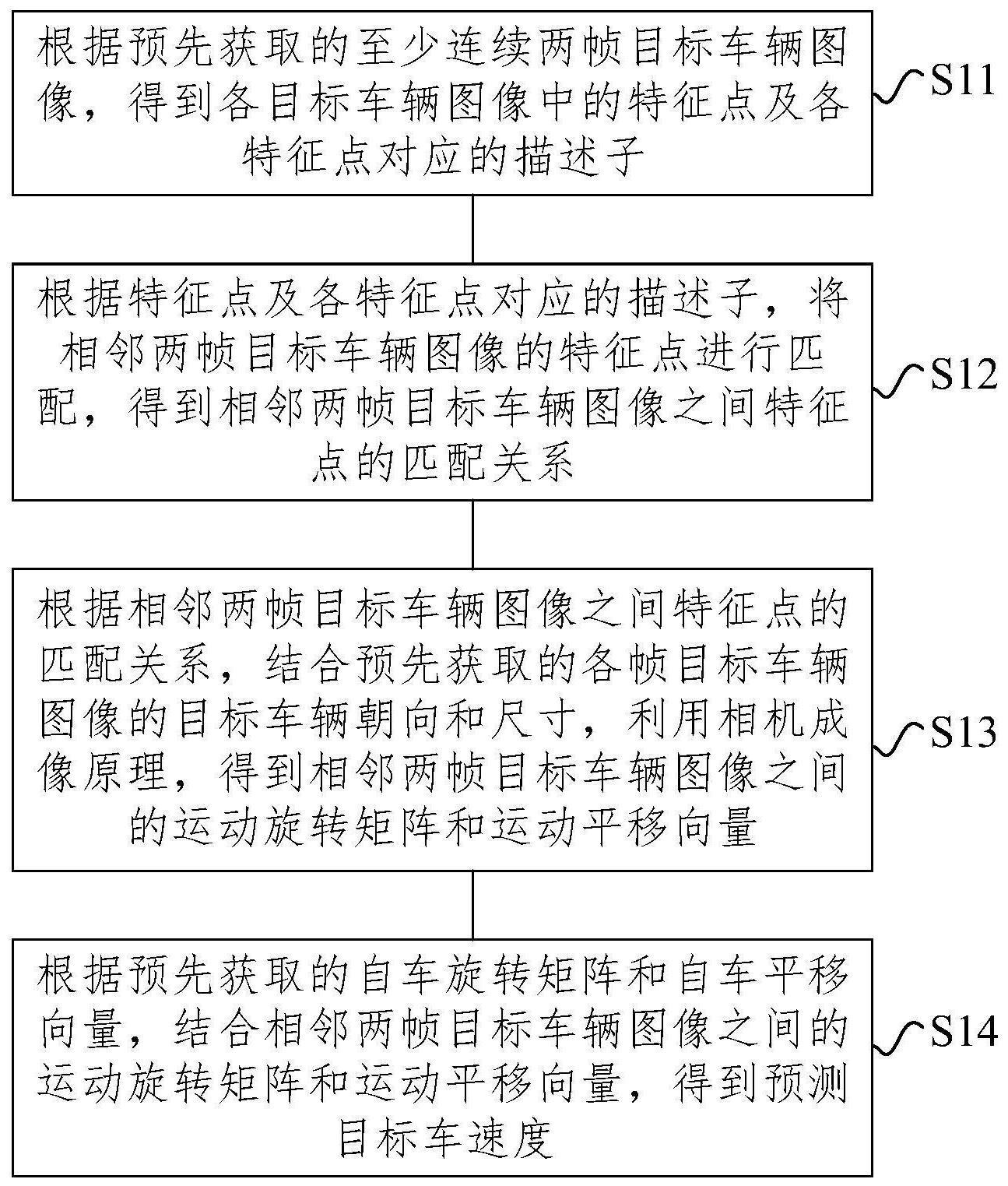
2、本发明提供一种车辆速度预估方法,包括:根据预先获取的至少连续两帧目标车辆图像,得到各所述目标车辆图像中的特征点及各所述特征点对应的描述子;根据所述特征点及各所述特征点对应的描述子,将相邻两帧目标车辆图像的特征点进行匹配,得到相邻两帧目标车辆图像之间特征点的匹配关系;根据所述相邻两帧目标车辆图像之间特征点的匹配关系,结合预先获取的各帧所述目标车辆图像的目标车辆朝向和尺寸,利用相机成像原理,得到所述相邻两帧目标车辆图像之间的运动旋转矩阵和运动平移向量;根据预先获取的自车旋转矩阵和自车平移向量,结合所述相邻两帧目标车辆图像之间的运动旋转矩阵和运动平移向量,得到预测目标车速度。
3、根据本发明提供的一种车辆速度预估方法,所述根据预先获取的至少连续两帧目标车辆图像,得到各所述目标车辆图像中的特征点及各所述特征点对应的描述子,包括:分别对各帧目标车辆图像进行视觉角点提取,得到对应所述各帧目标车辆图像的特征点;根据所述特征点,得到对应各所述特征点的描述子。
4、根据本发明提供的一种车辆速度预估方法,所述根据所述特征点,得到对应各所述特征点的描述子,包括:根据单帧目标车辆图像对应的特征点,确定所述单帧目标车辆图像特征点的周围区域图像;将所述周围区域图像输入至描述子提取模型中,得到所述描述子提取模型输出的描述子,其中,所述描述子提取模型是基于预先获取的相邻两帧目标训练图像中分别选取的训练点之间的匹配关系和对应描述子之间的相似度训练得到的。
5、根据本发明提供的一种车辆速度预估方法,训练所述描述子提取模型,包括:获取至少连续两帧目标训练图像及各所述目标训练图像的训练点;将单帧所述目标训练图像对应的训练点周围的区域图像输入至描述子提取模型中,得到所述描述子提取模型输出的对应各所述训练点的训练描述子;选择当前帧目标训练图像中的任一训练点,并基于其对应的训练描述子与在先帧目标训练图像中的训练点对应的训练描述子,得到对应相似度;基于相似度,判断所述当前帧目标训练图像的训练点与所述在先帧目标训练图像的训练点的匹配关系,若匹配,则根据匹配训练点的相似度构建损失函数;否则,根据不匹配训练点相似度的倒数,构建损失函数;基于所述损失函数收敛,结束训练。
6、根据本发明提供的一种车辆速度预估方法,在所述分别对各帧目标车辆图像进行视觉角点提取,得到特征点,包括:对所述目标车辆图像进行2d检测,得到2d检测框;根据所述2d检测框,对所述2d检测框内区域进行视觉角点提取,以及对所述2d检测框外区域进行视觉角点提取,得到特征点。
7、根据本发明提供的一种车辆速度预估方法,所述根据所述描述子,将所述相邻两帧目标车辆图像的特征点进行匹配,得到相邻两帧目标车辆图像之间特征点的匹配关系,包括:选择当前帧目标车辆图像中的任一特征点,并基于其对应的描述子与在先帧目标车辆图像中的特征点对应的描述子,得到对应特征相似度,并根据所述当前帧目标车辆图像所有特征点对应的特征相似度,构建代价矩阵;利用匈牙利匹配算法对所述代价矩阵进行处理,得到相邻两帧目标车辆图像之间特征点的匹配关系。
8、根据本发明提供的一种车辆速度预估方法,所述根据所述相邻两帧目标车辆图像之间特征点的匹配关系,并结合预先获取的各帧所述目标车辆图像的目标车辆朝向和尺寸,利用相机成像原理,得到所述相邻两帧目标车辆图像之间的运动旋转矩阵和运动平移向量,包括:根据预先获取的各帧所述目标车辆图像的目标车辆朝向和尺寸,得到各帧所述目标车辆图像中目标车辆的特征点在目标车体坐标系下的位置坐标;根据各帧所述目标车辆图像中目标车辆的特征点位置坐标,以及预先获取的目标车体坐标系到单目坐标系的旋转矩阵和平移向量,并利用相机成像原理,得到各帧所述目标车辆图像中各特征点的像素坐标;根据各帧所述目标车辆图像中各特征点的像素坐标,并结合所述相邻两帧目标车辆图像之间特征点的匹配关系,得到所述相邻两帧目标车辆图像之间的运动旋转矩阵和运动平移向量。
9、本发明还提供一种车辆速度预估装置,包括:特征提取模块,根据预先获取的至少连续两帧目标车辆图像,得到各所述目标车辆图像中的特征点及各所述特征点对应的描述子;匹配模块,根据所述特征点及各所述特征点对应的描述子,将所述相邻两帧目标车辆图像的特征点进行匹配,得到相邻两帧目标车辆图像之间特征点的匹配关系;偏移预测模块,根据所述相邻两帧目标车辆图像之间特征点的匹配关系,结合预先获取的各帧所述目标车辆图像的目标车辆朝向和尺寸,利用相机成像原理,得到所述相邻两帧目标车辆图像之间的运动旋转矩阵和运动平移向量;速度预估模块,根据预先获取的自车旋转矩阵和自车平移向量,结合所述相邻两帧目标车辆图像之间的运动旋转矩阵和运动平移向量,得到预测目标车速度。
10、本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述车辆速度预估方法的步骤。
11、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述车辆速度预估方法的步骤。
12、本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述车辆速度预估方法的步骤。
13、本发明提供的车辆速度预估方法及装置,通过提取获取的目标车辆图像的特征点及描述子,以便于根据描述子确定相邻帧目标车辆图像之间特征点的匹配关系,从而及时分辨出非静止目标和静止目标,提高了速度的分辨率;再结合相机成像原理,对目标车辆速度进行预测,以得到目标车相对于自车的运动;并根据自车相对于惯性坐标系的运动及目标车相对于自车的运动,得到目标车辆在惯性坐标下的运动,即预测目标车辆速度,从而显著提升目标车辆的测速精度,有效提升自动驾驶的安全性,实现了单目测速与3d测距的部分解耦。
技术特征:
1.一种车辆速度预估方法,其特征在于,包括:
2.根据权利要求1所述的车辆速度预估方法,其特征在于,所述根据预先获取的至少连续两帧目标车辆图像,得到各所述目标车辆图像中的特征点及各所述特征点对应的描述子,包括:
3.根据权利要求2所述的车辆速度预估方法,其特征在于,所述根据所述特征点,得到对应各所述特征点的描述子,包括:
4.根据权利要求3所述的车辆速度预估方法,其特征在于,训练所述描述子提取模型,包括:
5.根据权利要求2所述的车辆速度预估方法,其特征在于,在所述分别对各帧目标车辆图像进行视觉角点提取,得到特征点包括:
6.根据权利要求1所述的车辆速度预估方法,其特征在于,所述根据所述描述子,将所述相邻两帧目标车辆图像的特征点进行匹配,得到相邻两帧目标车辆图像之间特征点的匹配关系,包括:
7.根据权利要求1所述的车辆速度预估方法,其特征在于,所述根据所述相邻两帧目标车辆图像之间特征点的匹配关系,并结合预先获取的各帧所述目标车辆图像的目标车辆朝向和尺寸,利用相机成像原理,得到所述相邻两帧目标车辆图像之间的运动旋转矩阵和运动平移向量,包括:
8.一种车辆速度预估装置,其特征在于,包括:
9.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至7任一项所述车辆速度预估方法的步骤。
10.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述车辆速度预估方法的步骤。
技术总结
本发明提供一种车辆速度预估方法及装置,方法包括:根据预先获取的至少连续两帧目标车辆图像,得到各目标车辆图像中的特征点及各特征点对应的描述子;根据特征点及各特征点对应的描述子,将相邻两帧目标车辆图像的特征点进行匹配,得到相邻两帧目标车辆图像之间特征点的匹配关系;根据相邻两帧目标车辆图像之间特征点的匹配关系,结合预先获取的各帧目标车辆图像的目标车辆朝向和尺寸,利用相机成像原理,得到相邻两帧目标车辆图像之间的运动旋转矩阵和运动平移向量;根据预先获取的自车旋转矩阵和自车平移向量,结合相邻两帧目标车辆图像之间的运动旋转矩阵和运动平移向量,得到预测目标车速度。本发明能够显著提升目标车辆的测速精度。
技术研发人员:朱壬泰
受保护的技术使用者:际络科技(上海)有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!