物体检测匹配方法、装置、设备以及存储介质与流程
本申请涉及自动驾驶,具体涉及一种物体检测匹配方法、物体检测匹配装置、计算机设备以及计算机可读存储介质。
背景技术:
1、在自动驾驶技术中,自动驾驶车辆为了能够对下一步的驾驶行为做出规划判断需要对周围的物体进行检测,并将不同时刻的结果关联起来,以判断同一物体在不同时刻下位置的变化,这对车端环境感知、轨迹预测、行为规划以及场景重建有极大的帮助。
2、但目前由于相关技术一般采用在邻近时间点之间寻找关联来解决识别追踪问题,针对物体间存在长时间遮挡的情况则很难适用。
技术实现思路
1、本申请提供了一种物体检测匹配方法、物体检测匹配装置、计算机设备以及计算机可读存储介质。
2、本申请提供的物体检测匹配方法,包括:
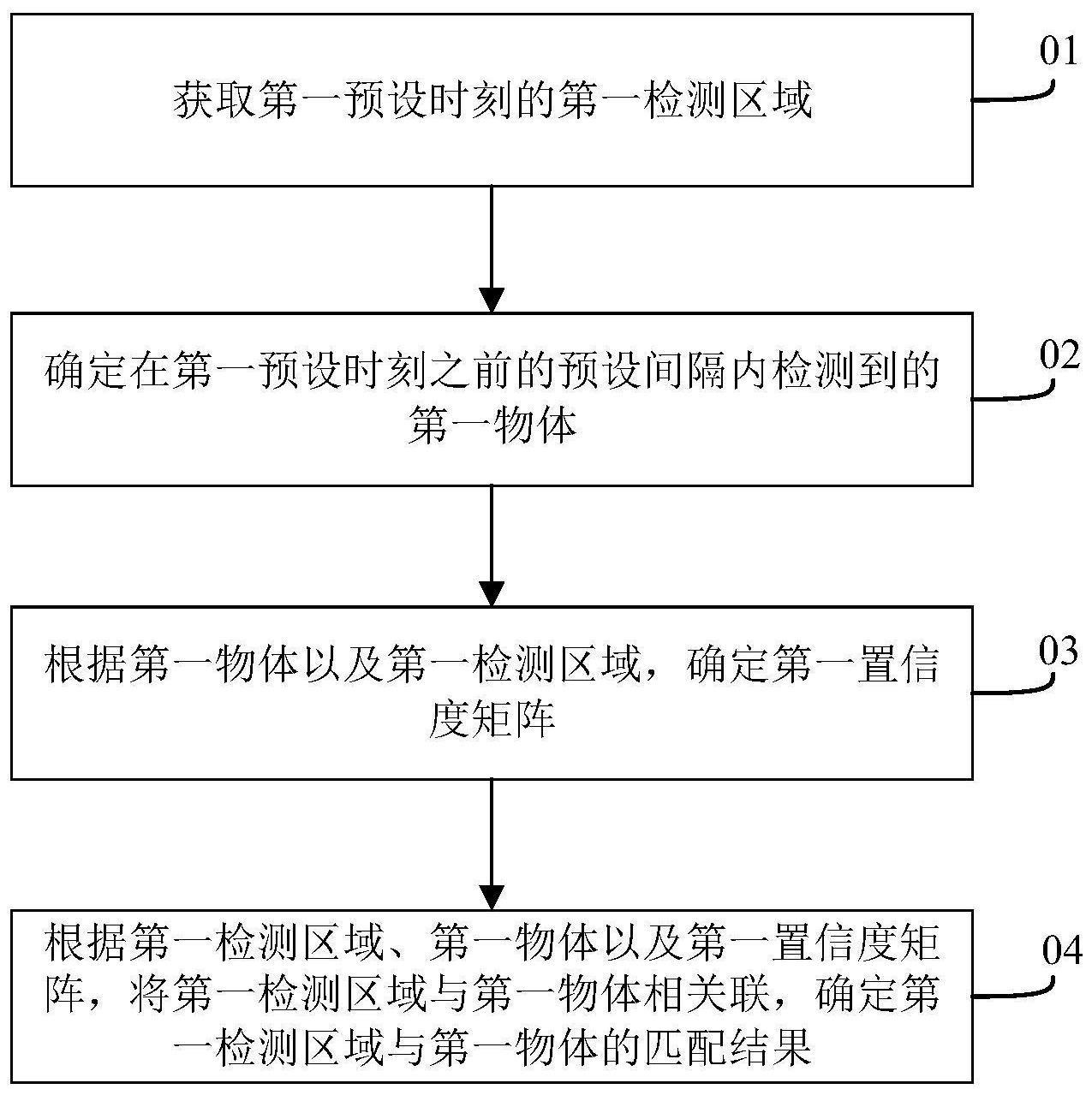
3、获取第一预设时刻的第一检测区域;
4、确定在所述第一预设时刻之前的预设间隔内检测到的第一物体;
5、根据所述第一物体以及所述第一检测区域,确定第一置信度矩阵;
6、根据所述第一检测区域、所述第一物体以及所述第一置信度矩阵,将所述第一检测区域与所述第一物体相关联,确定所述第一检测区域与所述第一物体的匹配结果,以实现自动驾驶途中对其他物体的检测与匹配。
7、如此,本申请通过当前时刻之前一定范围内检测到的物体以及当前时刻检测到的检测区域进行约束计算确定一个置信度矩阵,确定当前时刻的检测区域与当前时刻之前一定范围内检测到的物体的关联关系,完成当前时刻各检测区域内的物体与在先时刻检测到的物体的关联动作,绕开了需要根据邻近时间点进行匹配这一手段,从而摆脱了目前相关技术对邻近时间的关联关系的依赖,解决了不适应有遮挡场景的问题。
8、所述确定在所述第一预设时刻之前的预设时间间隔内检测到的第一物体,包括:
9、获取第二预设时刻的第二检测区域以及所述第二预设时刻的下一计时时刻的第三检测区域,所述第二预设时刻在所述第一预设时刻之前的预设时间间隔内;
10、根据所述第二检测区域以及所述第三检测区域,确定所述第二置信度矩阵;
11、根据所述第二检测区域、所述第三检测区域以及所述第二置信度矩阵,确定从所述第二预设时刻到所述第二预设时刻的下一计时时刻之间检测到的第二物体;
12、当所述第二预设时刻为所述第一预设时刻的前一计时时刻时,将得到的第二物体确定为所述第一物体。
13、如此,本申请可以实现每个时刻依次确定检测到的物体,并在需要进行匹配的时刻前将这些检测到的物体统一确定为匹配需要的第一物体。
14、所述根据所述第一物体,确定所述第一置信度矩阵,包括:
15、获取所述第一物体初次被检测到的时刻以及位置以及最近一次被检测到的时刻以及位置;
16、根据所述第一物体初次被检测到的时刻以及位置以及最近一次被检测到的时刻以及位置,确定所述第一置信度矩阵。
17、如此,可以根据第一物体的始末状态确认置信度矩阵,为后续的匹配动作提供数据源。
18、所述述根据所述第一物体初次被检测到的时刻以及位置以及最近一次被检测到的时刻以及位置,确定所述第一置信度矩阵,包括:
19、根据所述第一物体初次被检测到的时刻以及位置以及最近一次被检测到的时刻以及位置,在对极阈值约束下,确定所述第一置信度矩阵。
20、如此,本申请采用对极阈值约束计算确定置信度矩阵。
21、所述确定所述第一检测区域与所述第一物体的匹配结果,包括:
22、根据所述第一置信度矩阵,利用匈牙利算法,确定所述第一检测区域与第一物体的匹配结果。
23、如此,本申请可利用匈牙利算法实现第一检测区域与第一物体的匹配。
24、所述确定所述第一检测区域与所述第一物体的匹配结果,包括:
25、根据所述第一置信度矩阵,利用km算法,确定所述第一检测区域与第一物体的匹配结果。
26、如此,本申请可利用km算法实现第一检测区域与第一物体的匹配。
27、所述确定所述第一检测区域与第一物体的匹配结果,包括:
28、根据所述第一置信度矩阵,确定所述第一检测区域中与所述第一物体是相同物体的已匹配检测区域,以及所述第一检测区域中与所述第一物体不是相同物体的未匹配检测区域;
29、获取所述第一物体的编号;
30、响应于匹配操作,将所述第一物体的编号赋予所述已匹配检测区域,将新的编号赋予所述未匹配检测区域。
31、如此,本申请可以通过对已匹配的物体以及未匹配的物体分别赋予不同的编号的方式来确定最终的匹配结果,为自动驾驶提供数据源。
32、本申请还设计一种物体检测匹配装置,包括:
33、检测模块,用于获取第一预设时刻的第一检测区域;
34、物体获取模块,用于确定在所述第一预设时刻之前的预设时间间隔内检测到的第一物体;
35、数据处理模块,用于根据所述第一物体,确定第一置信度矩阵;
36、匹配模块,用于根据所述第一检测区域、所述第一物体以及所述第一置信度矩阵,将所述第一检测区域与所述第一物体相关联,确定所述第一检测区域与所述第一物体的匹配结果。
37、本申请还涉及一种电子设备,所述电子设备包括存储器和处理器,所述存储器中存储有计算机程序,所述计算机程序被所述处理器执行时,实现上述的方法。
38、本申请还涉及一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,当所述计算机程序被一个或多个处理器执行时,实现上述的方法。
39、本申请的实施方式的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本申请的实施方式的实践了解到。
技术特征:
1.一种物体检测匹配方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述确定在所述第一预设时刻之前的预设时间间隔内检测到的第一物体,包括:
3.根据权利要求1所述的方法,其特征在于,所述根据所述第一物体,确定所述第一置信度矩阵,包括:
4.根据权利要求3所述的方法,其特征在于,根据所述第一物体最近一次被检测到的时刻与位置以及所述第一检测区域的位置,确定所述第一置信度矩阵,包括:
5.根据权利要求1所述的方法,其特征在于,所述确定所述第一检测区域与所述第一物体的匹配结果,包括:
6.根据权利要求1所述的方法,其特征在于,所述确定所述第一检测区域与所述第一物体的匹配结果,包括:
7.根据权利要求5或6所述的方法,其特征在于,所述确定所述第一检测区域与第一物体的匹配结果,包括:
8.一种物体检测匹配装置,其特征在于,所述装置包括:
9.一种计算机设备,其特征在于,所述计算机设备包括存储器与处理器;所述存储器存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行如权利要求1-7任一所述的方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序,当所述计算机程序被一个或多个处理器执行时,实现如权利要求1-7任一所述的方法。
技术总结
本申请涉及一种物体检测匹配方法,所述方法包括:获取第一预设时刻的第一检测区域;确定在第一预设时刻之前的预设间隔内检测到的第一物体;根据第一物体以及第一检测区域,确定第一置信度矩阵;根据第一检测区域、第一物体以及第一置信度矩阵,将第一检测区域与第一物体相关联,确定第一检测区域与第一物体的匹配结果,以实现自动驾驶途中对其他物体的检测与匹配。本申请通过确定当前时刻的检测区域与当前时刻之前一定范围内检测到的物体的关联关系,完成当前时刻各检测区域内的物体与在先时刻检测到的物体的关联动作,绕开了需要根据邻近时间进行匹配这一手段,避免了近邻匹配与预测法匹配存在的不适应有遮挡场景的问题。
技术研发人员:张键驰,郑丽娜,孙力
受保护的技术使用者:广州小鹏自动驾驶科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!