一种污水曝气自动检测识别方法
本发明涉及污水检测,具体涉及一种污水曝气自动检测识别方法。
背景技术:
1、目前为止的地下污水处理池进行巡检时,有两种方式:
2、(1)人工巡检:即在污水厂上方盖的池板上开个观察孔,操作人员通过弯腰探头来对污水池曝气状况进行观察,在污水反应池上加了挡板之后,光线微弱且人眼睛观察到的范围比较小,就会导致巡检人员的工作有很高的强度,同时也伴随着很大的危险性,更无法全面了解整个污水池的曝气状况,为污水厂的运行和维护工作造成很大的困难。
3、(2)在污水池挡板下装巡检机器人(或视频监控装置),将污水池中的曝气状况通过视频的方式传送至工作台,由工作台前的工作人员进行判断曝气是否正常,但是这种方式的数据量非常巨大,工作人员的判断效率低下,且容易受到主观性等的影响,同时视觉疲劳会导致误检的发生。
4、通过机器人设备及软件算法进行自动化只能判别,但是该方法受算法和外部环境的影响大,同时虽然数据量巨大,但是曝气不正常的样本较少,视频采集到的图像存在的干扰很对判断的正确性影响很大,所以在这里就要采用合适的算法,并对算法进行一系列的改进来降低外部干扰对检测的影响,提高检测的正确率。
技术实现思路
1、针对上述存在问题或不足,本发明提供一种污水曝气自动检测识别方法,在现有的深度学习算法的基础上,提出一种检测精确度更高的曝气状况视频智能识别方法。
2、为实现上述目的,本发明采用了以下技术方案:
3、一种污水曝气自动检测识别方法,对采集到的图像进行下述的识别处理:
4、s1采用图像分割的方式进行干扰的剔除,干扰包括图像中的文字、墙壁;将图像均匀切割为n个区域,从n个区域的子图中提取m份作为整个图像的特征子图,其中提取出的特征子图是包含泡沫较多的子图;
5、s2采用改进的sobel算子提取图像的边缘信息;由ostu算法产生全局阈值,由改进的bernsen算法产生局部阈值,然后将两者进行加权;
6、s3通过霍夫变换进行直线检测的方式检测边缘图像中的最长的一条直线线段,而该线段一定是墙壁边缘的一部分,且线段的两个端点一定存在于墙壁边缘的连通域内,最后进行墙壁边缘剔除。
7、进一步地:ostu算法核心就是对于一幅图像,通过计算得出一个最佳的阈值,这个值满足二值化图像的背景与目标之间具有最大的类间方差,从而达到两者易于区分的目的;
8、假设现有图像灰度值范围为(0,k-1),像素点个数总和为n的图像,对应于第i个灰度级的像素点数量为ni,出现的概率为:
9、
10、
11、将图像中所有像素点按照灰度级从小到大排列,分为两类a和b,灰度级分布范围分别为(0,t)和(t+1,k-1);则:
12、
13、式中,u0表示该图像的灰度概率均值;
14、区域a的灰度概率均值计算公式如下:
15、
16、区域b的灰度概率均值计算公式如下:
17、
18、其中:
19、
20、式中ωa和ωb分别表示区域a和b的权值,根据上述概率均值计算公式可得:
21、u0=ωaua+ωbub
22、两个区域的方差为:
23、δ2=ωa(ua-uo)2+ωb(ub-u0)2
24、通过上述方差式中的δ2的最大值得到全局阈值的最优解t=t1。
25、进一步地:bernsen算法就是在灰度图像f中,以像素点(i,j)为中心的((2u+1)*(2u+1))大小的邻域中,计算各个像素点(i,j)的阈值t(i,j);表达式如下所示:
26、
27、然后对f(i,j)逐点二值化,遍历整个矩阵f(i,j),通过比较其与t(i,j)的大小来判断是背景像素点还是目标像素点,最后得到二值图像b(i,j);
28、
29、引入高斯去噪对该算法进行改进,设(i,j)处的像素灰度值用f(i,j)来表示,s代表的是以(i,j)为中心,((2u+1)*(2u+1))大小的邻域部分,在该区域内,为(i,j)处滤波后的灰度值,平滑尺度为δ,邻域内位置参数为λ,λ(i,j)代表(i,j)处的二值化结果。
30、进一步地:改进bernsen算法如下:
31、(1)计算f(i,j)处的阈值
32、
33、(2)对点f(i,j)在((2u+1)*(2u+1))的窗口中进行高斯平滑:
34、
35、(3)计算滤波后处的阈值t2(i,j):
36、
37、t=t2即为所求的局部阈值。
38、进一步地:对其求平均得到最终的阈值t,平均阈值如下:
39、
40、进一步地:通过霍夫变换找寻到的最长的直线线段存在于墙壁边缘的连通域内,此时需要记录直线线段的两个端点p1,p2的坐标;之后对边缘图像进行膨胀处理,通过膨胀处理可以将断裂的墙壁边缘连接起来,形成一个连通域,便于后续的墙壁边缘剔除。
41、进一步地:剔除墙壁边缘后的边缘图像,找寻直线线段的两个端点p1,p2所在的联通域,将整个连通域的像素值设置为0。
42、进一步地:分割各个区域的白色像素点数,分割为n份,提取出白色像素点最多的m份区域所对应的原始图像区域作为原始图像的特征图像;以此方式即可提取出特征子图,并将特征子图制作成为数据集,以备后续的训练。
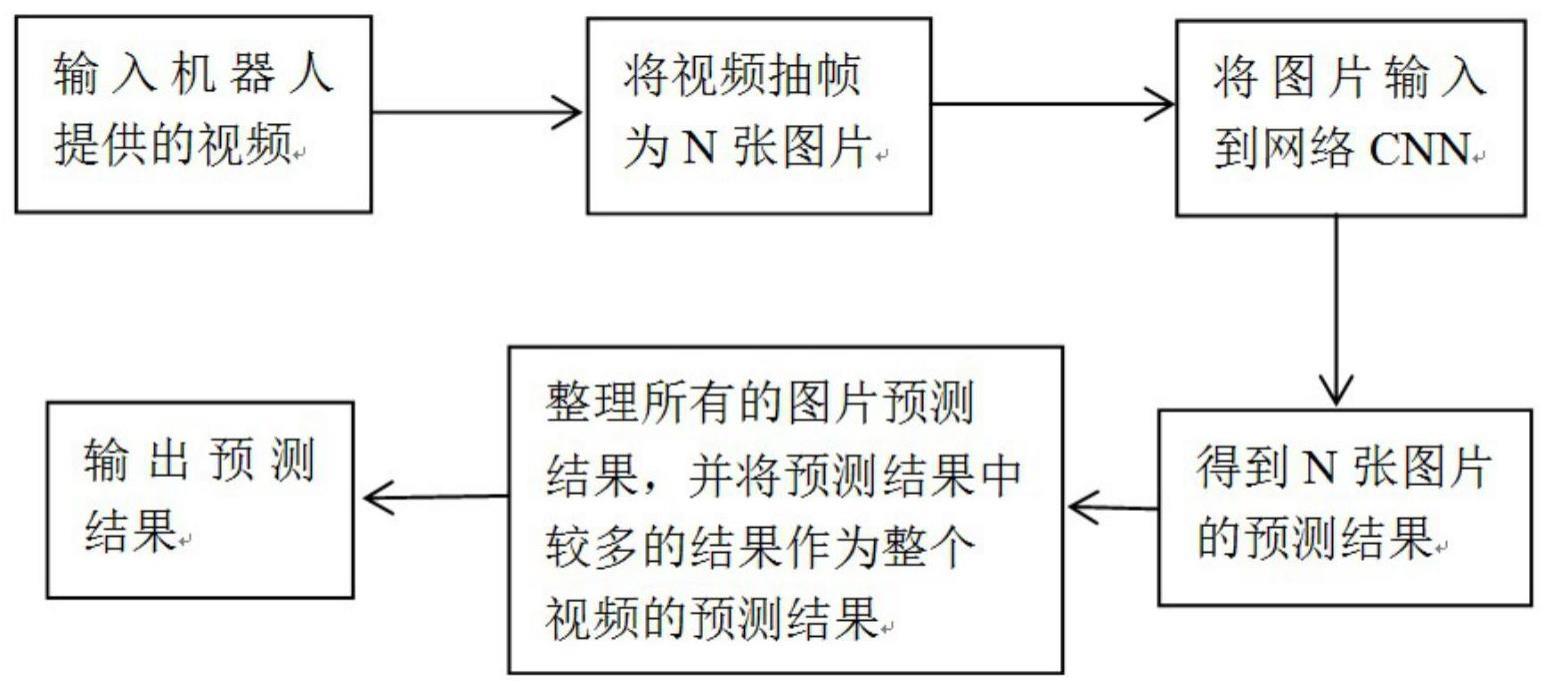
43、进一步地:将样本制作成为数据集,分为正常污水图片和不正常污水图片,以此数据集进行网络训练,后续的使用训练好的网络进行预测时需要对输入的图片进行相同的数字图像处理,之后对输入图片的m张子图进行判断,以判断数较多的结果作为输入图片的预测结果。
44、本发明的有益效果在于:
45、本发明设计了一套污水池曝气自动检测方法,通过采用图像处理算法,并对边缘检测算法进行一定的改进,使得自动检测算法能够准确的判断曝气是否异常,实现污水池曝气的智能检测,降低现有检测方法的弊端,提高工作效率,降低人工成本。
技术特征:
1.一种污水曝气自动检测识别方法,其特征在于:对采集到的图像进行下述的识别处理:
2.如权利要求1所述的一种污水曝气自动检测识别方法,其特征在于:ostu算法核心就是对于一幅图像,通过计算得出一个最佳的阈值,这个值满足二值化图像的背景与目标之间具有最大的类间方差,从而达到两者易于区分的目的;
3.如权利要求2所述的一种污水曝气自动检测识别方法,其特征在于:bernsen算法就是在灰度图像f中,以像素点(i,j)为中心的((2u+1)*(2u+1))大小的邻域中,计算各个像素点(i,j)的阈值t(i,j);表达式如下所示:
4.如权利要求3所述的一种污水曝气自动检测识别方法,其特征在于:改进bernsen算法如下:
5.如权利要求4所述的一种污水曝气自动检测识别方法,其特征在于:对其求平均得到最终的阈值t,平均阈值如下:
6.如权利要求5所述的一种污水曝气自动检测识别方法,其特征在于:通过霍夫变换找寻到的最长的直线线段存在于墙壁边缘的连通域内,此时需要记录直线线段的两个端点p1,p2的坐标;之后对边缘图像进行膨胀处理,通过膨胀处理可以将断裂的墙壁边缘连接起来,形成一个连通域,便于后续的墙壁边缘剔除。
7.如权利要求6所述的一种污水曝气自动检测识别方法,其特征在于:剔除墙壁边缘后的边缘图像,找寻直线线段的两个端点p1,p2所在的联通域,将整个连通域的像素值设置为0。
8.如权利要求7所述的一种污水曝气自动检测识别方法,其特征在于:分割各个区域的白色像素点数,分割为n份,提取出白色像素点最多的m份区域所对应的原始图像区域作为原始图像的特征图像;以此方式即可提取出特征子图,并将特征子图制作成为数据集,以备后续的训练。
9.如权利要求8所述的一种污水曝气自动检测识别方法,其特征在于:将样本制作成为数据集,分为正常污水图片和不正常污水图片,以此数据集进行网络训练,后续的使用训练好的网络进行预测时需要对输入的图片进行相同的数字图像处理,之后对输入图片的m张子图进行判断,以判断数较多的结果作为输入图片的预测结果。
技术总结
本发明涉及污水检测技术领域,公开了一种污水曝气自动检测识别方法,包括:S1采用图像分割的方式进行干扰的剔除,干扰包括图像中的文字、墙壁;将图像均匀切割为N个区域,从N个区域的子图中提取M份作为整个图像的特征子图,其中提取出的特征子图是包含泡沫较多的子图;S2采用改进的Sobel算子提取图像的边缘信息;由Ostu算法产生全局阈值,由改进的Bernsen算法产生局部阈值,然后将两者进行加权;S3墙壁边缘剔除。本发明设计了一套污水池曝气自动检测方法,通过采用图像处理算法,并对边缘检测算法进行一定的改进,使得自动检测算法能够准确的判断曝气是否异常,实现污水池曝气的智能检测,降低现有检测方法的弊端,提高工作效率,降低人工成本。
技术研发人员:何建,张林
受保护的技术使用者:宜宾电子科技大学研究院
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!