一种航空探地雷达无效数据辨识方法
1.本发明涉及一种探地雷达数据图像处理方法,具体涉及一种航空探地雷达无效数据辨识方法。
背景技术:
2.探地雷达是一种浅层地球物理探测手段,常应用于工程质量无损检测、水文地质调查、矿产资源勘探、地下管线普查、地质灾害隐患调查等,近年来随着发展勘探需求,逐步由手持拖行勘探发展为搭载器搭载形式勘探,比如车载、机载。其中机载探地雷达在数据采集时常常由于无人机飞行造成一系列无效数据,传统的无效数据辨识是通过人工分辨的方式,需要专业技术人员根据飞行造成无效数据进行人工判别,人工分辨效率低,划定缺乏统一标准,常常出现遗漏或误判等问题。随着人工智能的发展,各种神经网络模型相继应用于地质行业,例如运用基于神经网络算法的探地雷达应用于采空区辨识、岩溶辨识等,但是针对无人机搭载探地雷达常常得到一些飞行过程中产生的无效数据,目前还停留于人工标注。
技术实现要素:
3.本发明的目的是提供一种航空探地雷达无效数据辨识方法,该方法解决了现有技术航空探地雷达数据人工标定效率低、出错率高等问题,实现自动标注无人机飞行过程中产生的无效数据,有效提高辨识效率和准确度。
4.本发明的目的是通过以下技术方案实现的:一种航空探地雷达无效数据辨识方法,包括如下步骤:步骤s1:通过航空探地雷达进行图像数据采集,获得地质雷达剖面数据,形成样本数据集,其中:地质雷达剖面数据包含4类无效数据:飞行转弯时段数据、无人机上升时段数据、无人机下降时段数据、无人机突然加速或减速刹车时段数据,同时还包含稳定飞行的有效数据,将这些无效数据与有效数据形成1组采集数据;步骤s2:利用步骤s1的样本数据集,使用voc格式对航空探地雷达数据剖面图像进行标注,随机划分训练集、验证集以及测试集;步骤s3:利用卷积神经网络模型对步骤s2的训练集进行训练,训练中采用验证集查看模型,初步得到权重模型;步骤s4:利用测试集样本对步骤s3训练得到的权重模型进行模型测试,如果测试模型精度不满足要求则增加样本继续训练,如果测试模型精度满足要求则得到训练好的航空探地雷达无效数据辨识卷积神经网络模型;步骤s5:利用步骤s4获得训练好的航空探地雷达无效数据辨识卷积神经网络模型,对航空探地雷达数据剖面图像测试集进行无效数据目标检测,得到标定无效数据的探地雷达数据剖面图。
5.相比于现有技术,本发明具有如下优点:
本发明通过人工标注的航空探地雷达无效数据图像作为训练集,利用该训练集训练出基于卷积神经网络的无效数据辨识模型,可自动辨识飞行转弯时段、无人机上升时段、无人机下降时段、无人机突然加速或减速刹车时段采集的探地雷达剖面图像无效数据,采用该方法可以有效提高辨识效率与准确度,为有效的探地雷达数据解译做好基础工作准备。
附图说明
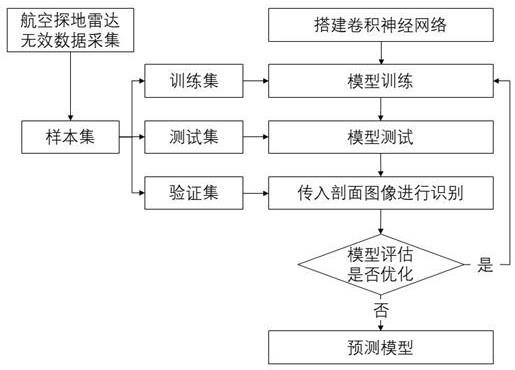
6.图1为航空探地雷达无效数据辨识方法的流程图;图2为卷积神经网络模型结构图。
具体实施方式
7.下面结合附图对本发明的技术方案作进一步的说明,但并不局限于此,凡是对本发明技术方案进行修改或者等同替换,而不脱离本发明技术方案的精神和范围,均应涵盖在本发明的保护范围中。
8.本发明提供了一种航空探地雷达无效数据辨识方法,如图1所示,所述方法包括如下步骤:步骤s1:通过航空探地雷达进行图像数据采集,获得地质雷达剖面数据,形成样本数据集,其中:地质雷达剖面数据包含稳定飞行的有效数据和以下4类无效数据:飞行转弯时段数据、无人机上升时段数据、无人机下降时段数据、无人机突然加速或减速刹车时段数据,将这些无效数据与有效数据形成1组采集数据。
9.本步骤中,对航空探地雷达数据采集飞行路线规划,在无人机飞行轨迹的特定部分使用探地雷达收集地质雷达剖面数据。
10.本步骤中,所述数据集至少采集200组数据,每组数据应包含有效数据和4类无效数据,并且采集的200组数据应该选择不一样的采集区。
11.步骤s2:利用步骤s1的样本数据集,使用voc格式对航空探地雷达数据剖面图像进行标注,随机划分训练集、验证集以及测试集。
12.本步骤中,训练集、验证集与测试集的比例为8:1:1。
13.本步骤中,数据剖面图像为对称或近似对称时,该段可标注为飞行转弯时段数据;数据剖面图像按一定角度向下(与无人机向上飞行角度对称)时,该段可标注为无人机上升时段数据;数据剖面图像突然模糊、分辨率明显异于总体情况时,该段可标注为无人机突然加速或减速刹车时段数据;数据剖面图像按一定角度向上(与无人机向下降落角度对称)时,该段可标注为无人机下降时段数据。
14.步骤s3:利用卷积神经网络模型对步骤s2的训练集进行训练,训练中自动利用本轮训练好的模型对验证集进行评估并计算精度,初步得到权重模型。
15.本步骤中,卷积神经网络模型为yolox检测模型,具体包括输入层(640*640*3的图像张量)、主干特征提取网络backbone、加强特征提取部分neck、网络检测输出head;所述backbone为cspdarknet,由focus、cbs、csplayer和spp模块组成,首先通过focus层对输入数据进行切片操作,可有效提升图片特征提取的质量,然后经过多个cbs和csplayer层对图像进行卷积,提取出图像中的有效特征,最后经过spp层对多尺度提取的通
道信息进行融合,增加模型的感受野;所述neck由fpn+pan组成,fpn结构是先将图片进行下采样,再通过pan对下采样的分支通过上采样进行拼接;所述head与之前yolo版本的head不同,分类和回归被拆分开,分别在1*1卷积中实现,最后预测的时候才整合在一起;训练集图像由输入层传输到主干特征提取网络中,首先通过backbone提取航空探地雷达数据剖面图像中无效数据的特征;然后经过neck将backbone提取的特征进行多尺度融合,提升模型的泛化能力;最后经过head对提取的特征进行解码,输出检测结果。
16.步骤s4:利用测试集样本对步骤s3训练得到的权重模型进行模型测试,如果测试模型精度不满足要求则增加样本继续训练,如果测试模型精度满足要求则得到训练好的航空探地雷达无效数据辨识卷积神经网络模型。
17.本步骤中,通过模型测试衡量初步模型的性能和分类能力,通过不断调整模型参数,记录模型准确率,选出效果最佳的模型参数,得到训练好的航空探地雷达无效数据辨识卷积神经网络模型。
18.步骤s5:利用步骤s4获得的训练好的航空探地雷达无效数据辨识卷积神经网络模型,对航空探地雷达数据剖面图像测试集进行无效数据目标检测,得到标定无效数据的探地雷达数据剖面图。具体步骤如下:调用步骤s4训练好的航空探地雷达无效数据辨识卷积神经网络模型,传入未参与训练与测试的航空探地雷达数据剖面图像进行无效数据目标检测,得到无效数据自动框取以及无效数据类型概率值大小,并通过非极大值抑制算法自动选取最大概率结果视为辨识结果。
技术特征:
1.一种航空探地雷达无效数据辨识方法,其特征在于所述方法包括如下步骤:步骤s1:通过航空探地雷达进行图像数据采集,获得地质雷达剖面数据,形成样本数据集,其中:地质雷达剖面数据包含稳定飞行的有效数据和4类无效数据:飞行转弯时段数据、无人机上升时段数据、无人机下降时段数据、无人机突然加速或减速刹车时段数据,将这些无效数据与有效数据形成1组采集数据;步骤s2:利用步骤s1的样本数据集,使用voc格式对航空探地雷达数据剖面图像进行标注,随机划分训练集、验证集以及测试集;步骤s3:利用卷积神经网络模型对步骤s2的训练集进行训练,训练中采用验证集查看模型,初步得到权重模型;步骤s4:利用测试集样本对步骤s3训练得到的权重模型进行模型测试,如果测试模型精度不满足要求则增加样本继续训练,如果测试模型精度满足要求则得到训练好的航空探地雷达无效数据辨识卷积神经网络模型;步骤s5:利用步骤s4获得训练好的航空探地雷达无效数据辨识卷积神经网络模型,对航空探地雷达数据剖面图像测试集进行无效数据目标检测,得到标定无效数据的探地雷达数据剖面图。2.根据权利要求1所述的航空探地雷达无效数据辨识方法,其特征在于所述步骤s1中,数据集至少采集200组数据,每组数据应包含有效数据和4类无效数据,并且采集的200组数据应该选择不一样的采集区。3.根据权利要求1所述的航空探地雷达无效数据辨识方法,其特征在于所述步骤s2中,训练集、验证集与测试集的比例为8:1:1。4.根据权利要求1所述的航空探地雷达无效数据辨识方法,其特征在于所述步骤s2中,数据剖面图像为对称或近似对称时,该段标注为飞行转弯时段数据;数据剖面图像按一定角度向下与无人机向上飞行角度对称时,该段标注为无人机上升时段数据;数据剖面图像突然模糊、分辨率明显异于总体情况时,该段标注为无人机突然加速或减速刹车时段数据;数据剖面图像按一定角度向上与无人机向下降落角度对称时,该段标注为无人机下降时段数据。5.根据权利要求1所述的航空探地雷达无效数据辨识方法,其特征在于所述步骤s3中,卷积神经网络模型为yolox检测模型,包括输入层、主干特征提取网络backbone、加强特征提取部分neck、网络检测输出head,训练集图像由输入层传输到主干特征提取网络中,首先通过backbone提取航空探地雷达数据剖面图像中无效数据的特征;然后经过neck将backbone提取的特征进行多尺度融合,提升模型的泛化能力;最后经过head对提取的特征进行解码,输出检测结果。6.根据权利要求5所述的航空探地雷达无效数据辨识方法,其特征在于所述backbone为cspdarknet,由focus、cbs、csplayer和spp模块组成,首先通过focus层对输入数据进行切片操作,然后经过多个cbs和csplayer层对图像进行卷积,提取出图像中的有效特征,最后经过spp层对多尺度提取的通道信息进行融合,增加模型的感受野;所述neck由fpn+pan组成,fpn先将图片进行下采样,再通过pan对下采样的分支通过上采样进行拼接;所述head的分类和回归被拆分开,分别在1*1卷积中实现,最后预测的时候整合在一起。7.根据权利要求1所述的航空探地雷达无效数据辨识方法,其特征在于所述步骤s4中,
通过模型测试衡量初步模型的性能和分类能力,通过不断调整模型参数,记录模型准确率,选出效果最佳的模型参数,得到训练好的航空探地雷达无效数据辨识卷积神经网络模型。8.根据权利要求1所述的航空探地雷达无效数据辨识方法,其特征在于所述步骤s5中,调用步骤s4训练好的航空探地雷达无效数据辨识卷积神经网络模型,传入未参与训练与测试的航空探地雷达数据剖面图像进行无效数据目标检测,得到无效数据自动框取以及无效数据类型概率值大小,并通过非极大值抑制算法自动选取最大概率结果视为辨识结果。
技术总结
本发明公开了一种航空探地雷达无效数据辨识方法,所述方法包括如下步骤:S1:通过航空探地雷达进行图像数据采集,获得地质雷达剖面数据,形成样本数据集;S2:对航空探地雷达数据剖面图像进行标注,随机划分训练集、验证集以及测试集;S3:利用卷积神经网络模型对训练集进行训练,训练中采用验证集查看模型,初步得到权重模型;S4:利用测试集样本权重模型进行模型测试,得到训练好的航空探地雷达无效数据辨识卷积神经网络模型;S5:对航空探地雷达数据剖面图像测试集进行无效数据目标检测,得到标定无效数据的探地雷达数据剖面图。采用该方法可以有效提高辨识效率与准确度,为有效的探地雷达数据解译做好基础工作准备。地雷达数据解译做好基础工作准备。地雷达数据解译做好基础工作准备。
技术研发人员:唐亮 凌贤长 张钟远 毛小刚 张熙阳 熊聪 陈宏伟 邱瑞 丛晟亦 田爽 孔祥勋
受保护的技术使用者:哈尔滨工业大学重庆研究院 中铁十七局集团有限公司
技术研发日:2022.11.26
技术公布日:2023/3/9
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1