一种基于单目相机像素偏差的起重对象位置确定方法
本发明涉及起重机转运视觉识别,具体是涉及一种基于单目相机像素偏差的起重对象位置确定方法。
背景技术:
1、随着核电占据国内用电比例的上升,许多核电相关单位(如核燃料棒生产单位、核废水存储单位)都需要起重机的转运。由于放射源中的高能射线会对自然环境和人体造成不同程度的伤害,因此由操作员实地操作桥式起重机对放射源(如核燃料棒,核废水)进行转运的方式开始逐渐减少,而工业相机能够实现操作员与被操作对象无实际接触和高度自动化的目的,因此通过工业相机实时显示放射源转运情况,操作员进行远程操作的情况逐渐增加。对于放射源库内的放射源转运,工程上必须保证桥式起重机的精度为毫米级(不超过5mm),而工业相机作为转运系统的眼睛,保证工业相机的准心正确具有非常重要的意义。
2、机器视觉因无接触、高精度等优点在工业领域蓬勃发展,但在实际工程项目中,工业相机的安装位置往往制约其性能的发挥,若工业相机水平于地面安装,则角度易于控制,相机视野易于调控但无法实时跟随起重设备移动;若工业相机垂直与地面安装,则角度不易于控制,相机视野不易于调控但可以实时跟随起重设备移动。在放射源转运过程中,必须实时显示起重设备的位置以及状态,因此只能采用固定在起重设备上的安装方法。但固定在起重设备上安装会造成工业相机随起重设备的移动而无法完全垂直于地面,从而会导致通过工业相机计算起重对象的位置与实际位置不符。
技术实现思路
1、发明目的:针对以上缺点,本发明提供一种位置确定准确的基于单目相机像素偏差的起重对象位置确定方法。
2、技术方案:为解决上述问题,本发明采用一种基于单目相机像素偏差的起重对象位置确定方法,其特征在于,包括以下步骤:
3、(1)单目相机与竖直方向倾斜设置;
4、(2)在单目相机视野范围内设置校准点csign;
5、(3)获取校准点csign以及单目相机在工作空间的坐标;
6、(4)获取校准点csign在单目相机成像图片上的实际坐标;
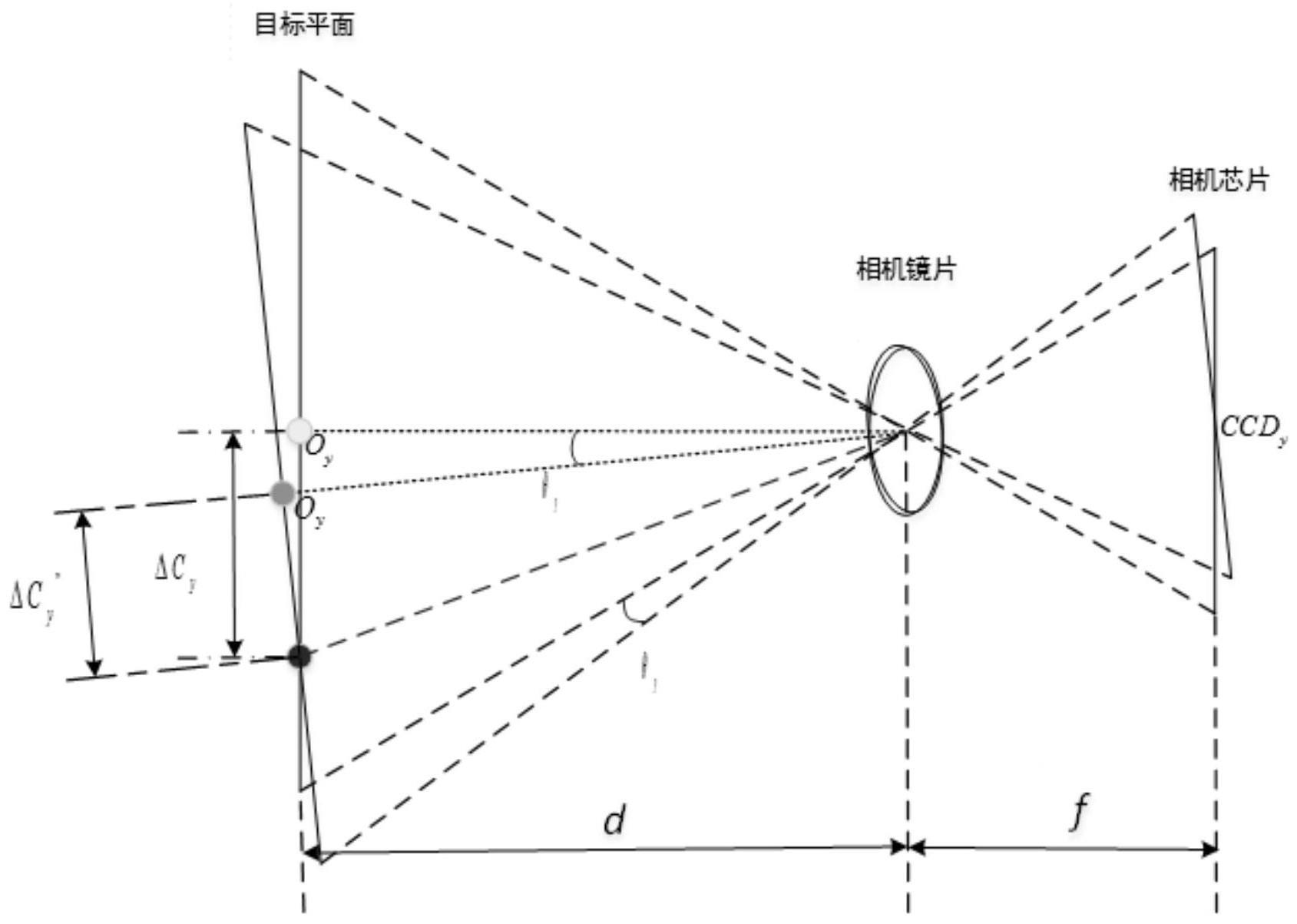
7、(5)根据单目相机成像原理,计算校准点csign在单目相机成像图片上的理论坐标;
8、(6)根据获取的实际坐标与理论坐标得到像素偏差;
9、(7)起重机转运物品时,实时获取单目相机倾斜角度,并获取单目相机成像图片上的起重对象位置坐标;
10、(8)根据单目相机成像图片上起重对象位置坐标,通过像素偏差校准得到起重对象的位置坐标。
11、进一步的,像素偏差计算起重对象的位置坐标(cx(d),cy(d))计算公式为:
12、
13、其中,d为起重对象所在平面与单目相机镜片之间的距离,f为单目相机焦距,psx为单目相机获取图像在x轴方向的尺寸,psy为单目相机获取图像在y轴方向的尺寸,δtx为单目相机获取的图像中起重对象与相机准心之间在x轴方向的距离,δty为单目相机获取的图像中起重对象与相机准心之间在y轴方向的的距离,ccdx为单目相机ccd芯片在x轴方向的尺寸,ccdy单目相机ccd芯片在y轴方向的尺寸,θ为单目相机在z轴方向的偏转角度,θx为单目相机在x轴方向的偏转角度,θy为单目相机在y轴方向的偏转角度。
14、有益效果:本发明相对于现有技术,其显著优点是利用单目相机计算校准点在像素坐标系的位置来获取因单目相机未垂直于地面地面在水平xy方向造成的像素偏差,再通过计算不同物距下的像素与物理距离的比例从而进行不同物距下的准心自动校准,能够解决相机不能完全垂直地面安装造成的准心偏移的问题,并具有安全、可靠、自动化程度高等优点,具有重大的实用价值。
技术特征:
1.一种基于单目相机像素偏差的起重对象位置确定方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的起重对象位置确定方法,其特征在于,通过像素偏差校准得到起重对象的位置坐标(cx(d),cy(d))计算公式为:
技术总结
本发明公开了一种一种基于单目相机像素偏差的起重对象位置确定方法通过在地面设置一定高度的校准点,利用单目相机计算校准点在像素坐标系的位置来获取因单目相机未垂直于地面地面在水平XY方向造成的像素偏差,再通过计算不同物距下的像素与物理距离的比例从而进行不同物距下的准心自动校准,能够解决相机不能完全垂直地面安装造成的准心偏移的问题,并具有安全、可靠、自动化程度高等优点,具有重大的实用价值。
技术研发人员:蒋向涛,丰明奎,余汉成,童晨,吕宇豪,朱鑫,周铭
受保护的技术使用者:南京航空航天大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!