一种用于偏折测量的相机自动标定方法
本发明涉及偏折测量,特别涉及一种用于偏折测量的相机自动标定方法。
背景技术:
1、偏折测量是一种结构简单、动态范围大、抗干扰能力强、测量精度高的光学检测方法,近年来已经引起了广泛的关注,并有望成为低成本、高精度光学检测的有效解决方案[l.huang,m.idir,c.zuo,and a.asundi,"review of phase measuring deflectometry,"optics and lasers in engineering 2018;107:247-257.]。
2、由于实际使用的相机并不是理想的针孔系统,屏幕和待测工件无法同时被相机对焦,因此“角度-位置不确定”是偏折测量中固有的问题。但所幸,针对屏幕离焦对测量精度带来的负面影响已经存在许多解决办法,这也使得将相机对焦在工件表面以保证测量点的位置准确性成为了目前的主流方案[y.n.chen,x.c.zhang,t.chen,r.zhu,l.ye,w.lang,“transition imaging phase measuring deflectometry for high-precisionmeasurement of optical surfaces,”measurement 2022;199:111589.]。
3、然而,不同工件之间的高度变化是无法避免的;另外,当不同待测表面间的曲率变化较大时,为了保证测量范围,也需要对相机和工件的相对位置进行调整,这都使得偏折测量中需要反复地对相机焦面位置进行调整。因此,为了保证相机模型的可靠性,在每次焦面位置调整后都需要重新进行相机标定,而高精度的相机标定需要采集十几乃至更多张标定板处于不同位姿的图像,这极大地影响了偏折测量的效率,也对操作人员的专业性提出了较高的要求。另外,特别对于一些空间受限的场景,比如在位偏折测量系统,要让标定板的各个位姿间存在足够的差异以保证求解问题的适定也十分困难。因此,由于对相机标定的需求,偏折测量中的高精度和高效率总是无法同时满足的。
4、为此特提出本发明,以至少部分地解决偏折测量对相机模型精度要求较高、相机标定操作影响测量效率的问题,使得相机内参可以直接由一个映射模型输出,从而摆脱繁琐的相机标定步骤,进而在保证测量精度的同时提高测量效率。
技术实现思路
1、针对现有技术存在的偏折测量中相机标定会影响测量效率的问题,本发明的目的在于提供一种用于偏折测量的相机自动标定方法,以便于至少部分地解决上述问题。
2、为实现上述目的,本发明的技术方案为:
3、第一方面,本发明提供一种用于偏折测量的相机自动标定方法,所述相机为针孔相机,所述相机的对焦环在电机的驱动下进行旋转从而实现对所述相机的焦面位置的调整,所述方法包括:
4、获取训练样本:
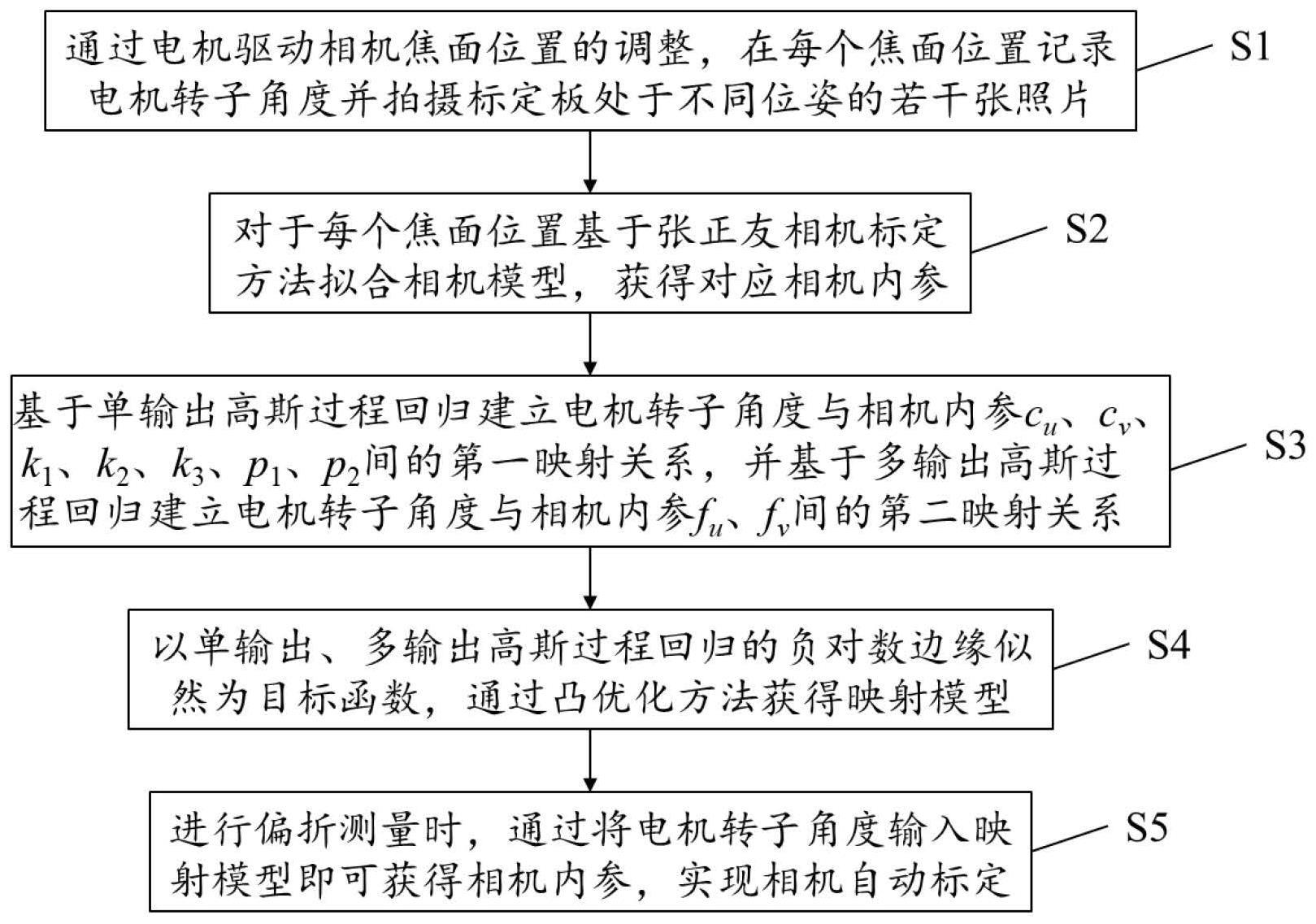
5、s1、通过电机驱动相机的对焦环转动以调整相机的焦面位置,并记录每个焦面位置所对应的电机转子角度,以及在每个焦面位置上均拍摄标定板处于不同位姿的若干张照片;
6、s2、对于每个焦面位置,基于标定板处于不同位姿的若干张照片以及张正友相机标定方法拟合相机模型,从而获取每个焦面位置上的相机内参;
7、其中,所述相机模型包括线性部分和非线性部分,相机模型的线性部分表示为:
8、
9、相机模型的非线性部分,即畸变模型表示为:
10、
11、其中,(u,v)为相机像素坐标,λ为尺度因子,p为空间中三维点的位置,r、t为相机外参,(ud,vd)为消畸变后的相机像素,r为像素点到像素坐标系原点的距离,cu、cv、fu、fv、k1、k2、k3、p1、p2为相机内参;
12、构建映射模型:
13、s3、通过设置随机超参数,基于单输出高斯过程回归建立电机转子角度与相机内参cu、cv、k1、k2、k3、p1、p2间的第一映射关系,并基于多输出高斯过程回归建立电机转子角度与相机内参fu、fv间的第二映射关系;
14、s4、以单输出、多输出高斯过程回归的负对数边缘似然为目标函数,通过基于梯度的凸优化方法优化所述超参数的取值,获取用于表示电机转子角度与相机内参间关系的映射模型;
15、相机标定:
16、s5、偏折测量时,当获取电子转子角度后,基于所述映射模型输出对应的相机内参,实现对相机的自动标定。
17、优选的,在步骤s3中,所述fu、fv间的比例关系由被标定的相机的固有像素尺寸决定,使得通过利用所述fu、fv间的相关性作为附加约束条件,以增加所述第二映射关系的鲁棒性。
18、优选的,在步骤s3中,使用基于平方指数运算和多项式运算的核函数,则对于任意两组输入变量α及α’,其间相关性k(α,α’)表示为:
19、
20、其中,σ1、σ2、l、c为核函数中的超参数,平方指数运算的应用使得训练样本的无限维特征得以被提取,多项式运算的应用使得映射模型在小训练样本情况下的性能得以提高。
21、优选的,所述相机的对焦环上固定安装有软齿条或者齿圈,所述电机的输出轴上对应地安装有齿轮。
22、本发明还提供一种电子设备,包括存储有可执行程序代码的存储器以及与所述存储器耦合的处理器;其中,所述处理器调用所述存储器中存储的可执行程序代码,执行如上所述的方法。
23、本发明还提供一种计算机可读存储介质,存储有计算机程序,所述计算机程序被处理器运行时执行如上所述的方法。
24、采用上述技术方案,本发明的有益效果在于:采用本发明技术方案进行相机标定,能够实现无需额外操作的相机内参输出也即相机标定,从而能够高效地实现相机标定,并且能够满足偏折测量的精度要求,使得在不影响测量精度的情况下可以有效提高测量效率。
技术特征:
1.一种用于偏折测量的相机自动标定方法,其特征在于:所述相机为针孔相机,所述相机的对焦环在电机的驱动下进行旋转从而实现对所述相机的焦面位置的调整,所述方法包括:
2.根据权利要求1所述的方法,其特征在于:在步骤s3中,所述fu、fv间的比例关系由被标定的相机的固有像素尺寸决定,使得通过利用所述fu、fv间的相关性作为附加约束条件,以增加所述第二映射关系的鲁棒性。
3.根据权利要求1所述的方法方法,其特征在于:在步骤s3中,使用基于平方指数运算和多项式运算的核函数,则对于任意两组输入变量α及α’,其间相关性k(α,α’)表示为:
4.根据权利要求1所述的方法,其特征在于:所述相机的对焦环上固定安装有软齿条或者齿圈,所述电机的输出轴上对应地安装有齿轮。
5.一种电子设备,其特征在于:包括存储有可执行程序代码的存储器以及与所述存储器耦合的处理器;其中,所述处理器调用所述存储器中存储的可执行程序代码,执行如权利要求1-4任一项所述的方法。
6.一种计算机可读存储介质,存储有计算机程序,其特征在于:所述计算机程序被处理器运行时执行如权利要求1-4任一项所述的方法。
技术总结
本发明公开了一种用于偏折测量的相机自动标定方法,属于视觉测量技术领域,包括:将一个软齿条固定在相机的对焦环上,并将一个套有齿轮的电机安装在相机的一侧,使得对焦环能够被电机控制,在预设的电机转子角度范围内调整焦面位置并进行人工相机标定,收集训练数据,并通过高斯过程回归建立电机转子角度与相机内参的映射模型,于是不同焦面位置对应的相机内参均直接通过将电机的转子角度输入到训练好的回归模型中获得,而不再需要人工标定。本发明能够解决偏折测量中需要频繁调整焦面位置以保证精度带来的操作繁琐、困难的问题,从而有效提高了偏折测量效率。
技术研发人员:张祥朝,陈雨诺,郎威,陈汀
受保护的技术使用者:复旦大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!