一种基于交互多模型的惯组冗余诊断方法与流程
本发明涉及火箭惯组冗余设计领域,具体涉及一种基于交互多模型的惯组冗余诊断方法。
背景技术:
1、随着科技发展和技术进步,运载火箭可靠性要求越来越高,捷联惯性测量组合是控制系统的重要单机设备,关系着运载火箭飞行的成败。因此,对惯组采取必要的冗余设计是提高火箭可靠性的重要手段。目前国内外运载领域航天器多采用双八表捷联或三捷联惯组冗余控制系统,通过增加仪表的数量,再进行软件硬件诊断来实现冗余控制,这类方法带来的缺陷是系统成本提高和结构的复杂化;同时,对冗余惯组的在线故障检测需要人为设计门限参数,扩展性较差的问题。
技术实现思路
1、本文提出一种基于交互多模型的惯组冗余诊断方法,在飞行过程全阶段均能实时监测主惯组和从惯组的输出是否正常。交互多模型的算法多用于目标跟踪应用,其基本原理是针对研究目标建立多个可能的运动模型,各个子模型都有各自的滤波器,模型之间的转移过程服从马尔科夫过程,将多个滤波器的输出结果进行加权融合处理得到最终的估计结果。
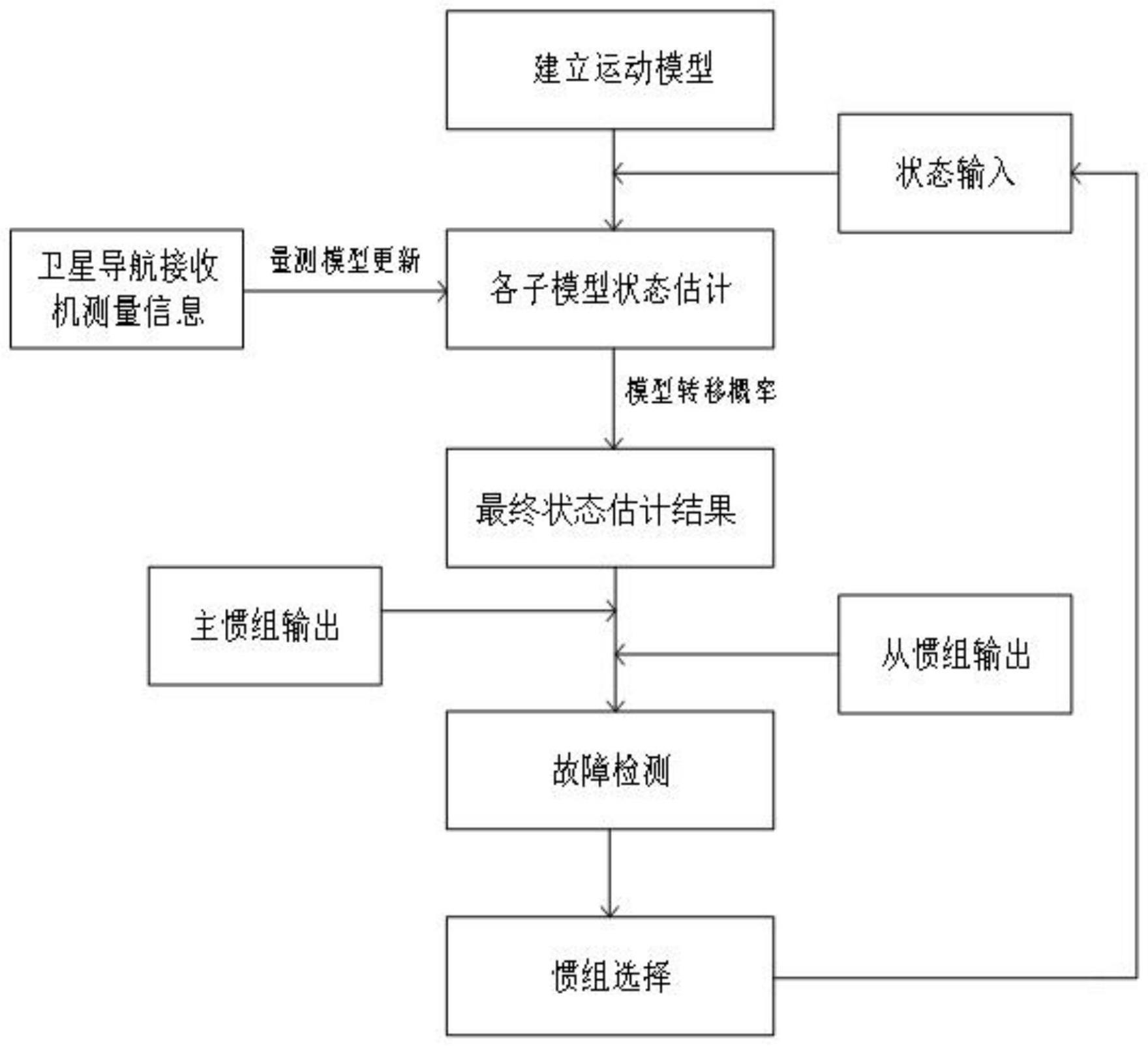
2、本发明的具体技术方案为:一种基于交互多模型的惯组冗余诊断方法,包括步骤:
3、s1、根据火箭各飞行段特点建立运动子模型(每个飞行段对应一个模型);应用扩展卡尔曼滤波算法作为每个子模型的子滤波模型;
4、s2、设置模型初始概率以及模型转移概率,使用卫星导航接收机的测量数据用于量测方程更新,火箭初始状态作为各子模型的输入,计算各子滤波模型的状态估计;
5、s3、计算更新的模型概率,再将多个状态估计值加权融合得到最终状态估计结果,期间各滤波模型的协方差也依次更新;
6、s4、将主惯组和从惯组的输出及导航计算结果与上述状态估计结果进行一致性比较,根据连续n个周期内差值是否大于设定的门限值来计算故障检测值,判断惯组是否正常。
7、进一步地,所述步骤s1中,
8、模型i的状态方程和量测方程可用下式表示,
9、x(k+1)=fi(k)x(k)+gi(k)ωi(k)
10、z(k)=hi(k)x(k)+vi(k)
11、其中,x(k+1)表示k+1时刻模型i中目标的1×n维状态向量,z(k)表示k时刻模型i中目标的1×r维观测向量,fi(k)为模型i的状态转移矩阵,gi表示模型i的过程噪声传递矩阵,h为观测雅克比矩阵,ωi(k)是模型i过程噪声,vi(k)是模型i量测噪声,两组噪声相互独立,k表示采样时间。
12、进一步地,所述状态向量x(k)包含15个维度,分别为卫星导航定位的x、y、z向的位置、速度、加速度、欧拉角和角速率。
13、进一步地,所述观测向量z(k)包含6个维度,分别为卫星导航定位的x、y、z向的位置和速度。
14、进一步地,所述步骤s2中,目标在k时刻模型i的模型概率为μi(k),假设在运动规律改变的上一时刻匹配的模型为模型i,下一时刻为模型j,模型i到模型j的模型转移概率为pij,且模型之间的转换过程遵循马尔科夫过程,概率转移矩阵为:
15、
16、其中m为子模型的个数;
17、初始输入计算如下:
18、k-1时刻从模型i切换到模型j的概率:
19、
20、其中,ui(k-1)为k-1时刻模型i的概率;cj为归一化常数,表征输入交互后处在模型j的预测概率;
21、
22、计算k-1时刻输入交互后处在模型j的状态估计和协方差矩阵:
23、
24、
25、其中,表示k-1时刻模型i的滤波估计值;
26、各子模型并行滤波计算如下:
27、状态预测:
28、
29、
30、其中,fj(k-1)x为k-1时刻模型j的状态转移矩阵,qj为过程噪声的协方差矩阵;
31、滤波增益:
32、
33、
34、其中,rj为量测噪声的协方差矩阵;
35、εj即是实际观测和预测观测之间的残差,sj(k)即是相应的协方差矩阵;
36、卡尔曼增益系数:kj(k)=pj(k|k-1)hj(k)sj-1(k)
37、状态更新:
38、状态滤波值:
39、协方差滤波值:pj(k|k)=[i-kj(k)hj(k)]pj(k|k-1)
40、进一步地,步骤s3中,模型j的似然函数:
41、
42、根据贝叶斯概率公式,更新模型j的概率:
43、
44、
45、输出融合后的滤波值:
46、
47、输出融合后的协方差估计值:
48、
49、进一步地,步骤s4中,故障检测值大于等于6时表示惯组故障,否则表示惯组正常。
50、进一步地,步骤s4中,所述门限值根据主从惯组之间的精度差进行设置。
51、进一步地,步骤s4中,所述n个周期,n为10-30,周期为导航计算的周期。
52、相比于现有技术,本发明的有益效果为:
53、本发明创新性地提出了一种基于交互多模型的惯组冗余诊断方法,避免了当前对冗余惯组的在线故障检测通常需要根据不同飞行段和实际弹道和任务去设计门限,扩展性较差的问题;本发明通过对火箭各个飞行段建立运动子模型,将各个子模型滤波器的输出结果进行加权融合处理得到最终的估计结果,估计结果与主惯组和从惯组的输出及导航计算结果进行比较,全程使用一个通用的门限,在飞行过程全阶段均能实时监测主惯组和从惯组的输出是否正常。
技术特征:
1.一种基于交互多模型的惯组冗余诊断方法,其特征在于,包括:
2.根据权利要求1所述的一种基于交互多模型的惯组冗余诊断方法,其特征在于,步骤s1中,
3.根据权利要求2所述的一种基于交互多模型的惯组冗余诊断方法,其特征在于,所述状态向量包含15个维度,分别为x、y、z向的位置、速度、加速度、欧拉角和角速率。
4.根据权利要求2所述的一种基于交互多模型的惯组冗余诊断方法,其特征在于,所述观测向量包含6个维度,分别为卫星导航定位的x、y、z向的位置和速度。
5.根据权利要求1所述的一种基于交互多模型的惯组冗余诊断方法,其特征在于,步骤s2中,目标在k时刻模型i的模型概率用μi(k)表示,假设在运动规律改变的上一时刻匹配的模型为模型i,下一时刻为模型j,用pij表示模型i到模型j的模型转移概率,且这个模型之间的转换过程遵循马尔科夫过程,概率转移矩阵表示为:
6.根据权利要求5所述的一种基于交互多模型的惯组冗余诊断方法,其特征在于,步骤s3中,
7.根据权利要求2所述的一种基于交互多模型的惯组冗余诊断方法,其特征在于,步骤s4中,所述故障检测值初始值为0,将输出的15维度的状态估计结果分别与导航计算结果作差,每当差值大于门限值时,故障检测值加1,故障检测值大于等于6时表示惯组故障,否则表示惯组正常。
8.根据权利要求1-7任意一项所述的一种基于交互多模型的惯组冗余诊断方法,其特征在于,所述步骤s4中,所述门限值根据主从惯组之间的精度差进行设置。
9.根据权利要求1-7任意一项所述的一种基于交互多模型的惯组冗余诊断方法,其特征在于,步骤s4中,所述n个周期,n为10-30,周期为导航计算的周期。
技术总结
本发明涉及一种基于交互多模型的惯组冗余诊断方法,在飞行过程全阶段均能实时监测主惯组和从惯组的输出是否正常。本发明创新性地提出了一种基于交互多模型的惯组冗余诊断方法,避免了当前对冗余惯组的在线故障检测通常需要根据不同飞行段和实际弹道和任务去设计门限,扩展性较差的问题;本发明通过对火箭各个飞行段建立运动子模型,将各个子模型滤波器的输出结果进行加权融合处理得到最终的估计结果,估计结果与主惯组和从惯组的输出及导航计算结果进行比较,全程使用一个通用的门限,在飞行过程全阶段均能实时监测主惯组和从惯组的输出是否正常。
技术研发人员:周鑫,段淑婧,左湛,王志军,张昌涌,黎桪,邹延兵
受保护的技术使用者:航天科工火箭技术有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!