一种铰链偏转角度的计算方法、电子设备及存储介质与流程
本申请涉及水利工程,具体而言,涉及一种铰链偏转角度的计算方法、电子设备及存储介质。
背景技术:
1、弧形闸门是挡水面为圆柱体的部分弧形面的闸门。由转动门体、预埋构建以及启闭设备三部分构成,其中转动门体包括门叶、支臂、支铰(包括铰链、铰轴、铰座等)组成。门叶作为挡水面,支臂连接门叶与支铰,支铰与预埋在水工建筑物上的预埋构建连接,将门叶承受的水压力传递到支铰,并通过铰座传递至水工建筑物上。弧形闸门按照支臂的形成分为斜支臂弧形闸门和直支臂弧形闸门。常见的斜支臂弧形闸门在门叶的内侧设置两个斜支臂,斜支臂由上、下两根支臂组成,两根支臂之间间隔布置竖向支撑和斜向拉杆,将上下支臂连接成一个整体,简称v型支臂。
2、斜支臂所在的平面与铰链的转动面具有一定的夹角,为了能够很好的固定斜支臂,铰链的侧面与斜支臂所在的平面平行,使得铰链的侧面与铰链的转动面之间具有一定的夹角,称为铰链的偏转角度,在斜支臂的参数确定后,铰链的偏转角度与弧形闸门的安装就位和平稳运行息息相关,铰链偏转角度的确定方式,目前采用建三维模型放样或利用空间几何角度关系计算,这两种方法计算过程复杂,需要结合辅助图形才能完成,当闸门布置参数发生改变时需要重新进行作图计算。
技术实现思路
1、本申请的目的在于提供一种铰链偏转角度的计算方法、电子设备及存储介质,能够简化铰链偏转角度的计算过程。
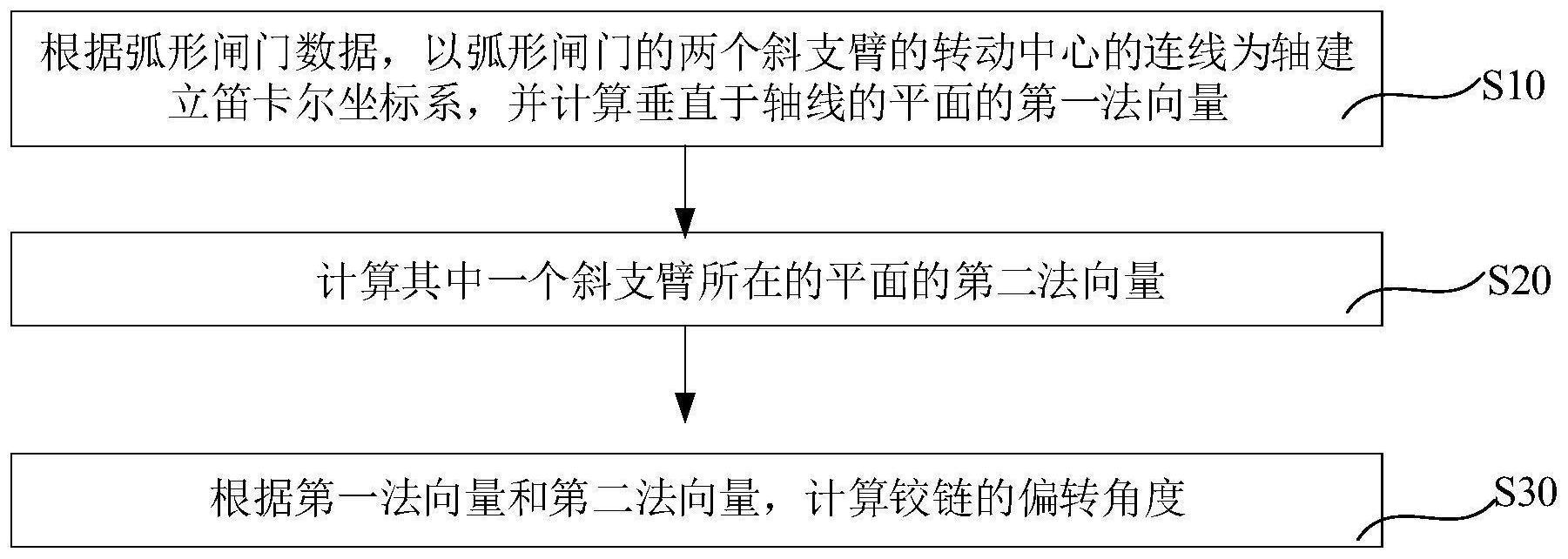
2、本申请的实施例一方面提供了一种铰链偏转角度的计算方法,包括:根据弧形闸门数据,以弧形闸门的两个斜支臂的转动中心的连线为轴建立笛卡尔坐标系,并计算垂直于轴线的平面的第一法向量,其中,弧形闸门包括弧形门叶以及设置于门叶内侧的两个斜支臂,斜支臂向远离门叶的方向延伸,斜支臂远离门叶的一端通过铰链与绞轴连接实现弧形闸门的转动,其中,铰链的侧面相对于铰链的转动平面具有偏转角度;计算其中一个斜支臂所在的平面的第二法向量;根据第一法向量和第二法向量,计算铰链的偏转角度。
3、作为一种可实施的方式,根据弧形闸门数据,以弧形闸门的两个斜支臂的转动中心的连线为轴线建立笛卡尔坐标系,并计算垂直于轴线的平面的第一法向量,包括:以两个斜支臂的转动中心的连线为x轴,以在水平方向内垂直于x轴的方向为y轴,以竖直方向为z轴建立笛卡尔坐标系;在y轴上取点a,在z轴上取点b,根据点a的坐标,点b的坐标以及笛卡尔坐标系的原点计算oyz平面的法向量,其中,oyz平面为垂直于x轴的平面。
4、作为一种可实施的方式,斜支臂包括具有夹角的上支臂和下支臂,计算其中一个斜支臂所在的平面的第二法向量,包括:在上支臂上取点c,在下支臂上取点d,并计算点c和点d的坐标值;根据点c、点d以及笛卡尔坐标系的原点计算ocd平面的第二法向量,其中,ocd平面为斜支臂所在的平面。
5、作为一种可实施的方式,上支臂和下支臂与门叶固定,在上支臂上取点c,在下支臂上取点d,并计算点c和点d的坐标值,包括:取上支臂的端点为点c,取下支臂的端点为点d;计算上支臂与z轴之间的夹角和下支臂与z轴之间的夹角根据夹角计算c点的坐标根据夹角计算d点的坐标其中,h2为下支臂和上支臂的长度,s3为上支臂和下支臂的端点相对于x轴的偏移量。
6、作为一种可实施的方式,计算上支臂与z轴之间的夹角和下支臂与z轴之间的夹角包括:基于公式:获取上支臂与z轴之间的夹角和下支臂与z轴之间的夹角其中,s1为下支臂对应门叶的点到门叶的下端部沿柱形面的弧长,s2为下支臂和上支臂对应门叶上的弧长;l为门叶的下端部与z轴之间的距离。
7、作为一种可实施的方式,在y轴上取点a,在z轴上取点b,根据点a的坐标,点b的坐标以及笛卡尔坐标系的原点计算oyz平面的法向量,其中,oyz平面为垂直于轴线的平面包括:在y轴上取点a的坐标为(0,1,0),在z轴上取点b的坐标为(0,0,1);将线段oa转化为向量将线段ob转化为向量对向量和向量进行向量积运算,获取oyz平面的法向量
8、作为一种可实施的方式,根据点c、点d以及笛卡尔坐标系的原点计算ocd平面的第二法向量,其中,ocd平面即斜支臂所在的平面包括:将线段oc转化为向量将线段od转化为向量对向量和进行向量积运算计算ocd平面的法向量
9、作为一种可实施的方式,根据第一法向量和第二法向量计算铰链的偏转角度包括:其中,θ即ocd平面与oyz平面的夹角。
10、本申请的实施例另一方面提供了一种电子设备,包括:处理器、存储介质和总线,存储介质存储有处理器可执行的机器可读指令,当电子设备运行时,处理器与存储介质之间通过总线通信,处理器执行机器可读指令,以执行上述铰链偏角度的计算方法的步骤。
11、本申请的实施例再一方面提供了一种存储介质,存储介质上存储有计算机程序,计算机程序被处理器运行时执行上述铰链偏转角度的计算方法的步骤。
12、本申请实施例的有益效果包括:
13、本申请提供的铰链偏转角度的计算方法,包括:根据弧形闸门数据,以弧形闸门的两个斜支臂的转动中心的连线为轴建立笛卡尔坐标系,并计算垂直于轴线的平面的第一法向量,其中,弧形闸门包括弧形门叶以及设置于门叶内侧的两个斜支臂,斜支臂向远离门叶的方向延伸,斜支臂远离门叶的一端通过铰链与绞轴连接实现弧形闸门的转动,其中,铰链的侧面相对于铰链的转动平面具有偏转角度;第一法向量为垂直于轴线的面的法向量,由于轴线为两个铰链的转动中心的连线,使得轴线与铰链的转动平面与轴线垂直,使得第一法向量即为铰链的转动平面的法向量;计算其中一个斜支臂所在的平面的第二法向量。其中,斜支臂所在的平面即为铰链的侧面所在的平面;根据第一法向量和第二法向量,计算铰链的偏转角度,两个平面之间的夹角与两个平面的法向量之间的夹角相同,从而使得第一法向量与第二法向量之间的夹角即为斜支臂所在的平面与铰链转动平面的夹角,也是铰链的侧面所在的平面与铰链转动平面支架的夹角,即铰链的偏转角度。本申请采用两个法向量之间的夹角计算铰链偏转角度,简化了铰链偏转角度的计算过程。
技术特征:
1.一种铰链偏转角度的计算方法,其特征在于,包括:
2.根据权利要求1所述的铰链偏转角度的计算方法,其特征在于,所述根据弧形闸门数据,以弧形闸门的两个斜支臂的转动中心的连线为轴线建立笛卡尔坐标系,并计算垂直于所述轴线的平面的第一法向量,包括:
3.根据权利要求2所述的铰链偏转角度的计算方法,其特征在于,所述斜支臂包括具有夹角的上支臂和下支臂,所述计算其中一个斜支臂所在平面的第二法向量,包括:
4.根据权利要求3所述的铰链偏转角度的计算方法,其特征在于,所述上支臂和所述下支臂通过与所述门叶固定,在所述上支臂上取点c,在所述下支臂上取点d,并计算点c和点d的坐标值,包括:
5.根据权利要求4所述的铰链偏转角度的计算方法,其特征在于,计算所述上支臂与z轴之间的夹角和下支臂与z轴之间的夹角包括:
6.根据权利要求2所述的铰链偏转角度的计算方法,其特征在于,所述在y轴上取点a,在z轴上取点b,根据所述点a的坐标、所述点b的坐标以及笛卡尔坐标系的原点计算oyz平面的第一法向量,其中,oyz平面即垂直于轴线的平面包括:
7.根据权利要求4所述的铰链偏转角度的计算方法,其特征在于,所述根据点c、点d以及笛卡尔坐标系的原点计算ocd平面的第二法向量,其中,ocd平面即斜支臂所在的平面包括:
8.根据权利要求7所述的铰链偏转角度的计算方法,其特征在于,所述根据第一法向量和第二法向量计算铰链的偏转角度包括:
9.一种电子设备,其特征在于,包括:处理器、存储介质和总线,所述存储介质存储有所述处理器可执行的机器可读指令,当电子设备运行时,所述处理器与所述存储介质之间通过总线通信,所述处理器执行所述机器可读指令,以执行如权利要求1-8任一所述铰链偏角度的计算方法的步骤。
10.一种存储介质,其特征在于,所述存储介质上存储有计算机程序,所述计算机程序被处理器运行时执行如权利要求1-8任一所述铰链偏转角度的计算方法的步骤。
技术总结
本申请公开了一种铰链偏转角度的计算方法、电子设备及存储介质,涉及水利工程技术领域,本申请的铰链偏转角度的计算方法,包括:根据弧形闸门数据,以弧形闸门的两个斜支臂的转动中心的连线为轴建立笛卡尔坐标系,并计算垂直于轴线的平面的第一法向量,其中,弧形闸门包括弧形门叶以及设置于门叶内侧的两个斜支臂,斜支臂远离门叶的一端通过铰链与绞轴连接实现弧形闸门的转动,其中,铰链的侧面相对于铰链的转动平面具有偏转角度;计算其中一个斜支臂所在的平面的第二法向量;根据第一法向量和第二法向量,计算铰链的偏转角度。本申请提供的铰链偏转角度的计算方法、电子设备及存储介质,能够简化铰链偏转角度的计算过程。
技术研发人员:黄臣勇,李云峰,徐国杨,陶光慧,谢晨希,何伟,王德丽,杨松,谢涛
受保护的技术使用者:贵州省水利水电勘测设计研究院有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!