基于改进YOLOv7x的驻地网作业规范质检方法及装置与流程
本发明涉及图像处理,具体涉及基于改进yolov7x的驻地网作业规范质检方法及装置。
背景技术:
1、网络通信已经成为人们生活的必需品,然而早期的网络资源分配存在着许多不合理的情况,如今三大运营商迫切需要对自己领域的网络资源进行核查,从机房出发,到主线光交箱,到配线光交箱再到分纤箱最后到用户。每一级的设备都需要仔细地清查核实。然而这整条网络链路是无源场景,清查人员是否到达现场按实按规范进行清查根本无从考证,对清查人员的作业规范进行监管需要耗费巨大的人力与时间成本。但传统的yolov7x算法对于图像特征的提取是采用cbs(conv+batchnorm+silu),每个模块后再跟一个池化层pool来稀疏特征,这种提取特征的方式在开源数据上表现良好,然而在应用场景小目标较多,且分布密集的情况下,若继续使用传统的卷积层将会导致细粒度信息的丢失和学习效率较低。
技术实现思路
1、本发明的目的在于提供基于改进yolov7x的驻地网作业规范质检方法及装置,能够对勘察人员进行一定的作业规范监管,从而保证勘察信息与实际信息能够相对应。
2、基于改进yolov7x的驻地网作业规范质检方法,其特征在于,具体包括以下步骤:
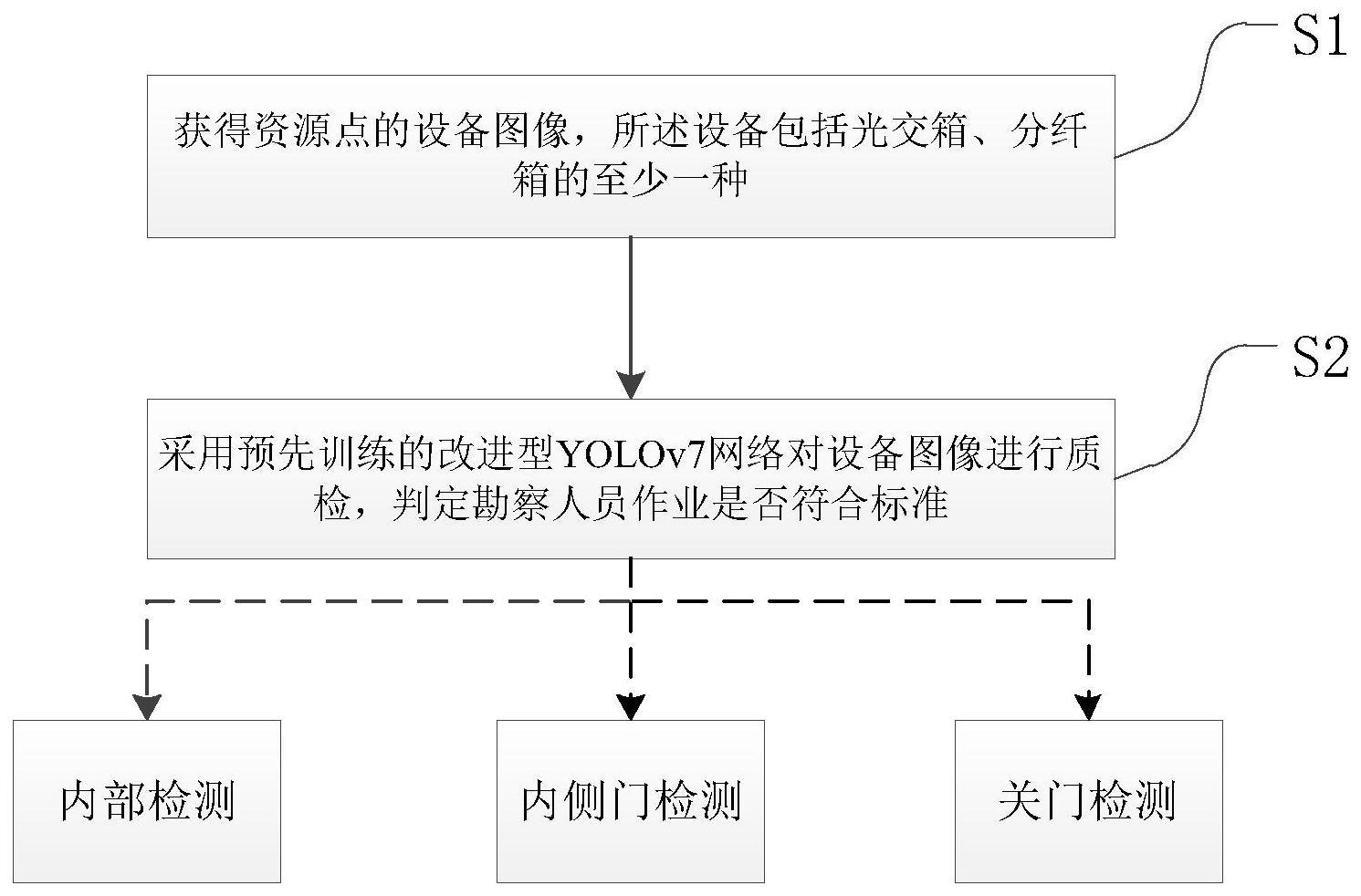
3、s1、获得资源点的设备图像,所述设备包括光交箱、分纤箱的至少一种;
4、s2、采用预先训练的改进型yolov7x网络对设备图像进行质检,判定勘察人员作业是否符合标准。
5、进一步地,所述改进型yolov7x网络,包括用于特征提取的backbone,用于目标检测的head,其中在backbone中:
6、将第二层、第四层、第十八层、第三十三层、第四十九层的步长为2的卷积层替换为spd-conv;
7、将前13层所有3*3的卷积核增大为5*5;
8、在每一个concat层:十二层、二十七层、四十二层后加入cbam注意力机制。
9、其中在head中,将ciou损失函数更换为siou损失函数。
10、进一步地,所述设备图像包括设备内部图像或设备内侧门图像或设备关门图像中的至少一种,所述质检,具体包括以下步骤:
11、内部检测:将所述设备内部图像输入预先训练的改进型yolov7x网络,获得设备内部预测值,根据所述设备内部预测值判断勘察人员作业是否符合标准;
12、内侧门检测:将所述设备内侧门图像输入预先训练的改进型yolov7x网络,获得设备内侧门预测值,根据所述设备内侧门预测值判断勘察人员作业是否符合标准;
13、关门检测:将所述设备关门图像输入预先训练的改进型yolov7x网络,获得设备关门预测值,根据所述设备关门预测值判断勘察人员作业是否符合标准;
14、以及当内部检测或内侧门检测或关门检测中的至少一种符合标准时,判定完成质检。
15、进一步地,所述设备图像包括设备内部图像、设备内侧门图像以及设备关门图像,所述质检,具体包括以下步骤:
16、内部检测:将所述设备内部图像输入预先训练的改进型yolov7x网络,获得设备内部预测值,根据所述设备内部预测值判断勘察人员作业是否符合标准;
17、内侧门检测:以及当内部检测符合标准时,将所述设备内侧门图像输入预先训练的改进型yolov7x网络,获得设备内侧门预测值,根据所述设备内侧门预测值判断勘察人员作业是否符合标准;
18、关门检测:以及当内侧门检测符合标准时,将所述设备关门图像输入预先训练的改进型yolov7x网络,获得设备关门预测值,根据所述设备关门预测值判断勘察人员作业是否符合标准;
19、以及当关门检测符合标准时,判定完成质检。
20、进一步地,所述内侧门检测与关门检测之间,还包括:
21、标签检测:当设备内侧门预测值当符合标准时,将所述设备内侧门图像输入预先训练的改进型yolov7x网络,核对标签粘贴是否规范。
22、进一步地,步骤s2中采用预先训练的改进型yolov7x网络对设备图像进行质检,获得对应的预测值,所述预测值为设备内部预测值或设备内侧门预测值或设备关门预测值中的一种,所述预测值为15个图像特征的集合,对集合中的15个图像特征进行异或运算,根据运算结果判断勘察人员作业是否符合标准。
23、进一步地,根据运算结果判断勘察人员作业是否符合标准包括:
24、同时出现15个图像特征中的5个特定特征,判定勘察人员作业符合标准。
25、进一步地,还包括:
26、当内部检测不符合标准时,累计不符合标准的总次数;
27、当总次数>3次时,调整质检策略:当同时出现15个图像特征中的3个特定特征,判定勘察人员作业符合标准。
28、进一步地,所述预先训练的改进型yolov7x网络,具体由以下步骤得到:
29、s002、使用步骤s001中得到的训练集对步骤s3中构建的改进型yolov7x网络进行训练,得到训练后的改进型yolov7x网络权重;
30、s003、使用步骤s001中得到的测试集对步骤s002中得到的训练后的改进型yolov7x模型进行测试,并调整模型超参数。
31、s004、反复进行s001,s002,s003,得到性能最好的网络模型用以质检场景。
32、基于改进yolov7x的驻地网作业规范质检的识图装置,包括:
33、一个或多个处理器;
34、存储单元,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行时,能使得所述一个或多个处理器实现所述的基于改进yolov7x的驻地网作业规范质检方法。
35、本发明具有的有益效果:
36、在算法上,首先针对目标检测领域对于小目标检测容易漏检,误检的情况,提出基于spd-conv和通用注意力机制cbam的yolov7x算法。将yolov7x中backbone中步长为2的conv替换为spd-conv结构,能够针对小目标存在较多的图像,较为模糊的图像进行更细粒度的特征提取,以此来改善真实场景中小目标漏检误检的情况。其次,在backbone的每个concat层前接入cbam注意力机制,能够在提取特征时着重关注标注信息,以此来提升模型对目标特征的学习能力。训练过程采用mosaic高阶数据增强策略,并增加自适应图像调整策略来增强模型的泛化能力,并针对特定质检步骤二值化目标信息,让模型只关注目标轮廓特征,使用siou作为惩罚函数,新增角度惩罚项,防止预测框四处游荡造成训练时收敛慢,收敛难的情况,提升相关质检场景的训练收敛速度以及真实场景的预测目标位置的准确度。相较于原生yolov7x,基于改进yolov7x的目标检测在哑资源场景上表现更好。
技术特征:
1.基于改进yolov7x的驻地网作业规范质检方法,其特征在于,具体包括以下步骤:
2.根据权利要求1所述的基于改进yolov7x的驻地网作业规范质检方法,其特征在于,所述改进型yolov7x网络,包括用于特征提取的backbone,用于目标检测的head,其中在backbone中:
3.根据权利要求1所述的基于改进yolov7x的驻地网作业规范质检方法,其特征在于,所述设备图像包括设备内部图像或设备内侧门图像或设备关门图像中的至少一种,所述质检,具体包括以下步骤:
4.根据权利要求3所述的基于改进yolov7x的驻地网作业规范质检方法,其特征在于,所述设备图像包括设备内部图像、设备内侧门图像以及设备关门图像,所述质检,具体包括以下步骤:
5.根据权利要求4所述的基于改进yolov7x的驻地网作业规范质检方法,其特征在于,所述内侧门检测与关门检测之间,还包括:
6.根据权利要求5所述的基于改进yolov7x的驻地网作业规范质检方法,其特征在于,步骤s2中采用预先训练的改进型yolov7x网络对设备图像进行质检,获得对应的预测值,所述预测值为设备内部预测值或设备内侧门预测值或设备关门预测值中的一种,所述预测值为15个图像特征的集合,对集合中的15个图像特征进行异或运算,根据运算结果判断勘察人员作业是否符合标准。
7.根据权利要求6所述的基于改进yolov7x的驻地网作业规范质检方法,其特征在于,根据运算结果判断勘察人员作业是否符合标准包括:
8.根据权利要求7所述的基于改进yolov7x的驻地网作业规范质检方法,其特征在于,还包括:
9.根据权利要求2所述的基于改进yolov7x的驻地网作业规范质检方法,其特征在于,所述预先训练的改进型yolov7x网络,具体由以下步骤得到:
10.基于改进yolov7x的驻地网作业规范质检的识图装置,其特征在于,包括:
技术总结
本发明公开了基于改进YOLOv7x的驻地网作业规范质检方法及装置,具体包括以下步骤:S1、获得资源点的设备图像,所述设备包括光交箱、分纤箱的至少一种;S2、采用预先训练的改进型YOLOv7x网络对设备图像进行质检,判定勘察人员作业是否符合标准。本发明针对目标检测领域对于小目标检测容易漏检,误检的情况,提出基于SPD‑Conv和通用注意力机制CBAM的YOLOv7x算法。将YOLOv7x中BackBone中步长为2的Conv替换为SPD‑Conv结构,能够针对小目标存在较多的图像,较为模糊的图像进行更细粒度的特征提取,以此来改善真实场景中小目标漏检误检的情况。
技术研发人员:罗维,李佶源,崔波,蒋毅,李俊
受保护的技术使用者:重庆品胜科技有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!