基于地形曲率的无人机点云压缩方法、系统及介质与流程
本发明涉及地形坡度,特别涉及一种基于地形曲率的无人机点云压缩方法方法、系统及介质。
背景技术:
1、地形坡度是重要地形因子,在地质灾害防治、森林防火、工程建设等领域都属于重要的基础数据;然而该数据的采集、分析与预测并不直观。传统的倾斜摄影测量、lidar等技术手段可以快速采集区域高程数据,但采集的数据属于数字表面模型dsm(digitalsurface model),其高程信息包含地物高度,不能直接用于坡度计算;因此,实现利用数据对地形坡度预测可以大幅增加坡度数据来源,满足相关领域应用需求。
2、dsm数据不包含类别信息,数据本身不能区分地形、地物,若直接用于坡度计算,则坡度信息极易被高程突变的地形所影响;在建筑物边缘、高压线塔、灌木丛等地物覆盖区域,地物对坡度影响主要在以下两个方面:一、此类区域边缘受高程突变影响,地物边缘会形成坡度的突变;二、在此类区域的中间位置,高程变化仅与地物特性相关,无法反应地形变化。
3、因此,针对dsm无法生成坡度的问题,且针对机载、低带宽条件下无人机点云下传困难的问题,需设计一种新的基于地形曲率的无人机点云压缩方案。
技术实现思路
1、本发明的提供一种基于地形曲率的无人机点云压缩方法方法、系统及介质,保留地形细节的同时大幅压缩点云数据,实现了无人机点云数据有效压缩。
2、第一方面,提供一种基于地形曲率的无人机点云压缩方法,包括以下步骤:
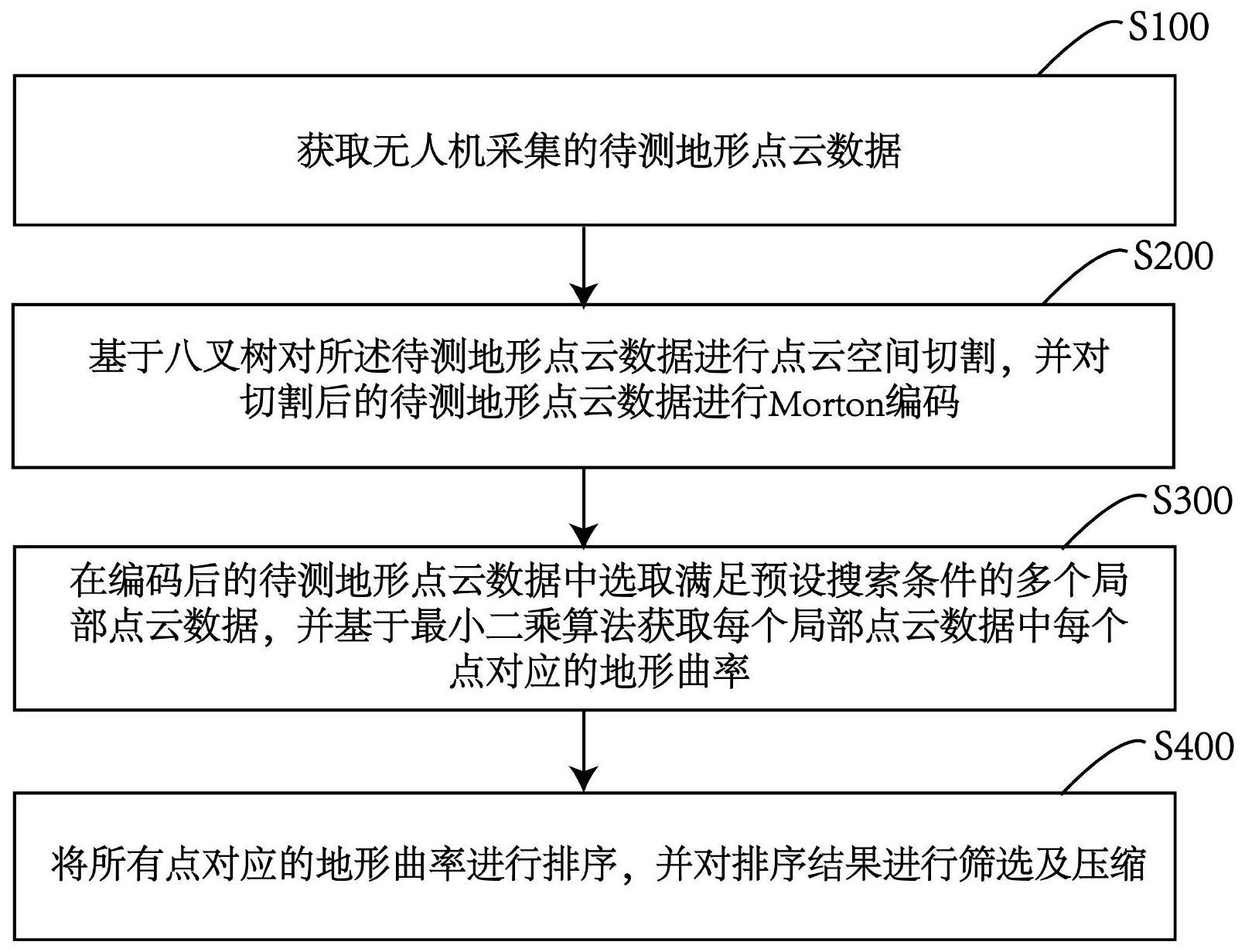
3、获取无人机采集的待测地形点云数据;
4、基于八叉树对所述待测地形点云数据进行点云空间切割,并对切割后的待测地形点云数据进行morton编码;
5、在编码后的待测地形点云数据中选取满足预设搜索条件的多个局部点云数据,并基于最小二乘算法获取每个局部点云数据中每个点对应的地形曲率;
6、将所有点对应的地形曲率进行排序,并对排序结果进行筛选及压缩。
7、根据第一方面,在第一方面的第一种可能的实现方式中,所述“基于八叉树对所述待测地形点云数据进行点云空间切割”步骤,具体包括以下步骤:
8、按照预设切割方向将待测地形点云数据进行点云空间切割,获取预设个数的单元点云空间;
9、对包含待测地形点云数据的单元点云空间按照同样的切割方式进行点云空间切割,直至切割出来的单元点云空间的边长小于预设边长阈值。
10、根据第一方面的第一种可能的实现方式,在第一方面的第二种可能的实现方式中,所述“对切割后的待测地形点云数据进行morton编码”步骤,具体包括以下步骤:
11、按照如下公式对切割后的待测地形点云数据进行morton编码:
12、p=pi-18i-1+pi-28i-2+…+p080;
13、式中,pi为八进制数码。
14、根据第一方面的第二种可能的实现方式,在第一方面的第三种可能的实现方式中,所述“基于最小二乘算法获取每个局部点云数据中每个点对应的地形曲率”步骤,具体包括以下步骤:
15、根据二次曲面方程如下:
16、z(x,y)=ax2+by2+cxy+dx+ey+f;
17、根据目标函数如下:
18、
19、获取每个局部点云数据中每个点在x2、y2、xy、x、y方向对应的偏导数
20、根据所述偏导数,获取每个点对应的地形曲率;
21、式中,a、b、c、d、e、f为二次曲面方程的系数;n为每个局部点云数据内的点数;z(xj,yj)为点j的x、y在二次曲面方程中拟合的高程,zj为实际高程。
22、根据第一方面的第三种可能的实现方式,在第一方面的第四种可能的实现方式中,所述“根据所述偏导数,获取每个点对应的地形曲率”步骤,具体包括以下步骤:
23、按照如下公式,获取每个点对应的地形曲率,
24、
25、其中,
26、根据第一方面的第四种可能的实现方式,在第一方面的第五种可能的实现方式中,所述“将所有点对应的地形曲率进行排序,并对排序结果进行筛选及压缩”步骤,具体包括以下步骤:
27、将所有点对应的地形曲率按照预设排序条件进行排序;
28、对排序结果中小于预设曲率阈值的地形曲率进行剔除;
29、对剔除后的排序结果进行压缩。
30、第二方面,提供一种基于地形曲率的无人机点云压缩系统,包括:
31、数据获取模块,用于获取无人机采集的待测地形点云数据;
32、切割编码模块,与所述数据获取模块通信连接,用于基于八叉树对所述待测地形点云数据进行点云空间切割,并对切割后的待测地形点云数据进行morton编码;
33、地形曲率模块,与所述切割编码模块通信连接,用于在编码后的待测地形点云数据中选取满足预设搜索条件的多个局部点云数据,并基于最小二乘算法获取每个局部点云数据中的每个点对应的地形曲率;以及,
34、压缩模块,与所述地形曲率模块通信连接,用于将所有点对应的地形曲率进行排序,并对排序结果进行筛选及压缩。
35、第三方面,提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上述任一项所述的基于地形曲率的无人机点云压缩方法。
36、与现有技术相比,本发明的优点如下:首先获取无人机采集的待测地形点云数据;再基于八叉树对所述待测地形点云数据进行点云空间切割,并对切割后的待测地形点云数据进行morton编码;再在编码后的待测地形点云数据中选取满足预设搜索条件的多个局部点云数据,并基于最小二乘算法获取每个局部点云数据中每个点对应的地形曲率;再将所有点对应的地形曲率进行排序,并对排序结果进行筛选及压缩;针对dsm无法生成坡度的问题,且针对无人机采集点云数据无法在保留地形细节的同时实现有效下传的问题,提供了一种基于地形曲率的无人机点云压缩方法,基于八叉树进行点云空间索引建立,然后地形曲率计算以及点云压缩。因此利用地形曲率、对点云数据进行分析处理,在保留地形细节的同时大幅压缩点云数据,实现了无人机点云数据有效压缩。
37、附图说明
38、图1是本发明一种基于地形曲率的无人机点云压缩方法的一实施例的流程示意图;
39、图2是地形曲率弯曲特性示意图;
40、图3是本发明一种基于地形曲率的无人机点云压缩方法的又一实施例的流程示意图;
41、图4是本发明的一种基于地形曲率的无人机点云压缩系统的结构示意图。
技术特征:
1.一种基于地形曲率的无人机点云压缩方法,其特征在于,包括以下步骤:
2.如权利要求1所述的基于地形曲率的无人机点云压缩方法,其特征在于,所述“基于八叉树对所述待测地形点云数据进行点云空间切割”步骤,具体包括以下步骤:
3.如权利要求1所述的基于地形曲率的无人机点云压缩方法,其特征在于,所述“对切割后的待测地形点云数据进行morton编码”步骤,具体包括以下步骤:
4.如权利要求1所述的基于地形曲率的无人机点云压缩方法,其特征在于,所述“基于最小二乘算法获取每个局部点云数据中每个点对应的地形曲率”步骤,具体包括以下步骤:
5.如权利要求1所述的基于地形曲率的无人机点云压缩方法,其特征在于,所述“根据所述偏导数,获取每个点对应的地形曲率”步骤,具体包括以下步骤:
6.如权利要求1所述的基于地形曲率的无人机点云压缩方法,其特征在于,所述“将所有点对应的地形曲率进行排序,并对排序结果进行筛选及压缩”步骤,具体包括以下步骤:
7.一种基于地形曲率的无人机点云压缩系统,其特征在于,包括:
8.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6中任一项所述的基于地形曲率的无人机点云压缩方法。
技术总结
本发明公开了一种基于地形曲率的无人机点云压缩方法、系统及介质,其方法包括以下步骤:获取无人机采集的待测地形点云数据;基于八叉树对所述待测地形点云数据进行点云空间切割,并对切割后的待测地形点云数据进行Morton编码;在编码后的待测地形点云数据中选取满足预设搜索条件的多个局部点云数据,并基于最小二乘算法获取每个局部点云数据中每个点对应的地形曲率;将所有点对应的地形曲率进行排序,并对排序结果进行筛选及压缩;能保留地形细节的同时大幅压缩点云数据,实现了无人机点云数据有效压缩。
技术研发人员:史潇天,彭松,吴宗慧,雷宽
受保护的技术使用者:华中光电技术研究所(中国船舶集团有限公司第七一七研究所)
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!