双目摄像头的标定方法、装置、计算机可读介质及设备与流程
本申请涉及计算机,具体而言,涉及一种双目摄像头的标定方法、装置、计算机可读介质及设备。
背景技术:
1、在人脸识别领域,双目摄像头能够构建出人脸立体深度信息,可以有效防止图片、视频等多种活体攻击方式,从而得到广泛应用。在目前的技术方案中,双目摄像头需要围绕标定板,在不同位置拍摄标定板照片以进行标定,或者多块标定板组合成一整块,通过不同角度的摆放,双目摄像头对其拍摄一组照片以进行标定。然而,上述方法中,双目摄像头需要拍摄多张照片,且标定板与双目摄像头之间的距离固定,深度信息不足,使得标度精度存在一定损失。由此,如何提高双目摄像头的标定效率,并保证标定结果的准确性成为了亟待解决的技术问题。
技术实现思路
1、本申请的实施例提供了一种双目摄像头的标定方法、装置、计算机可读介质及设备,进而至少在一定程度上可以提高双目摄像头的标定效率,并保证标定结果的准确性。
2、本申请的其他特性和优点将通过下面的详细描述变得显然,或部分地通过本申请的实践而习得。
3、根据本申请实施例的一个方面,提供了一种双目摄像头的标定方法,该方法包括:
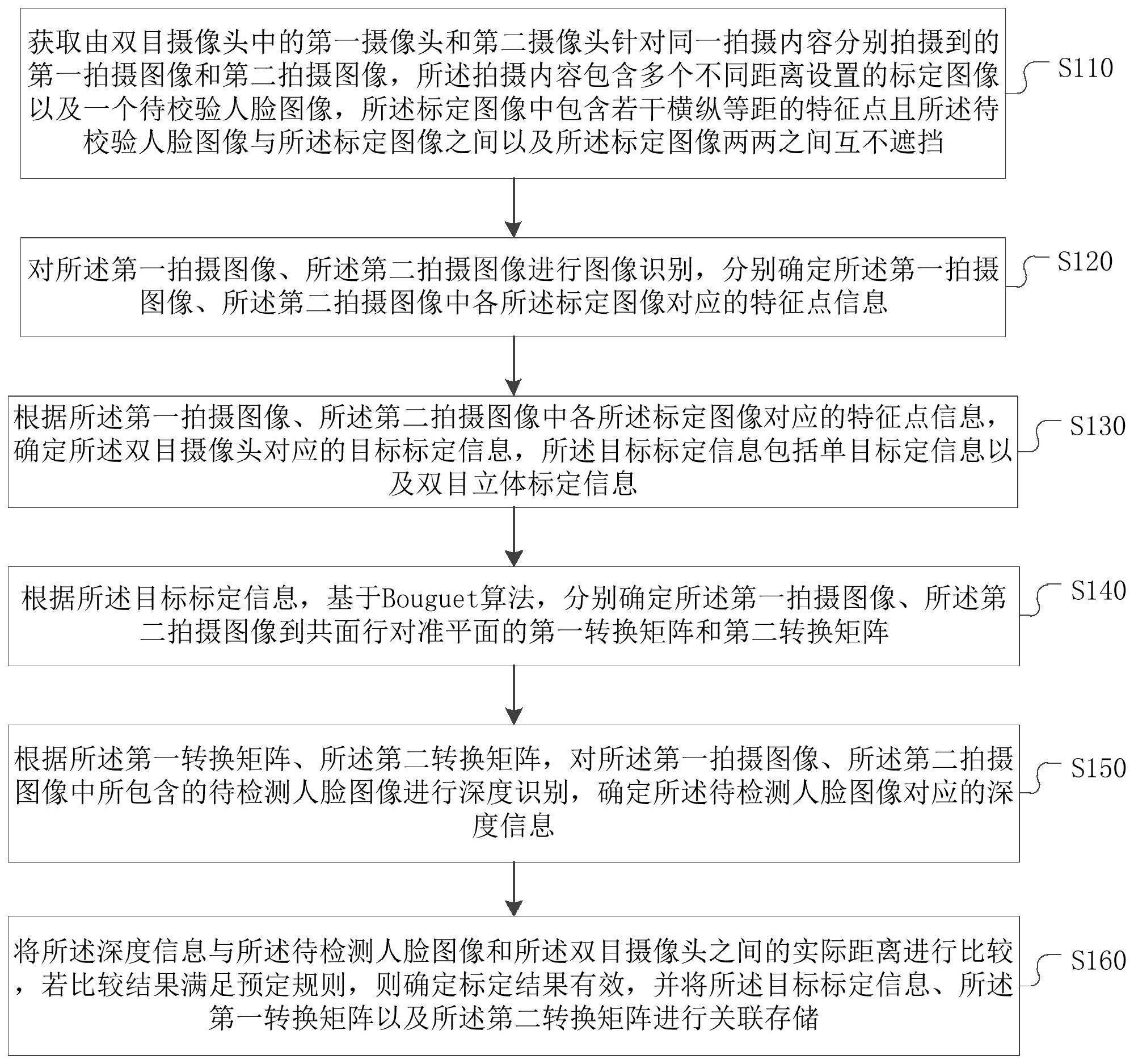
4、获取由双目摄像头中的第一摄像头和第二摄像头针对同一拍摄内容分别拍摄到的第一拍摄图像和第二拍摄图像,所述拍摄内容包含多个不同距离设置的标定图像以及一个待校验人脸图像,所述标定图像中包含若干横纵等距的特征点且所述待校验人脸图像与所述标定图像之间以及所述标定图像两两之间互不遮挡,;
5、对所述第一拍摄图像、所述第二拍摄图像进行图像识别,分别确定所述第一拍摄图像、所述第二拍摄图像中各所述标定图像对应的特征点信息;
6、根据所述第一拍摄图像、所述第二拍摄图像中各所述标定图像对应的特征点信息,确定所述双目摄像头对应的目标标定信息,所述目标标定信息包括单目标定信息以及双目立体标定信息;
7、根据所述目标标定信息,基于bouguet算法,分别确定所述第一拍摄图像、所述第二拍摄图像到共面行对准平面的第一转换矩阵和第二转换矩阵;
8、根据所述第一转换矩阵、所述第二转换矩阵,对所述第一拍摄图像、所述第二拍摄图像中所包含的待检测人脸图像进行深度识别,确定所述待检测人脸图像对应的深度信息;
9、将所述深度信息与所述待检测人脸图像和所述双目摄像头之间的实际距离进行比较,若比较结果满足预定规则,则确定标定结果有效,并将所述目标标定信息、所述第一转换矩阵以及所述第二转换矩阵进行关联存储。
10、在本申请实施例的一个方面,提供了一种双目摄像头的标定装置,该装置包括:
11、获取模块,用于获取由双目摄像头中的第一摄像头和第二摄像头针对同一拍摄内容分别拍摄到的第一拍摄图像和第二拍摄图像,所述拍摄内容包含不同距离设置的待校验人脸图像以及多个标定图像,所述标定图像中包含若干横纵等距的特征点且所述待校验人脸图像与所述标定图像之间以及所述标定图像两两之间互不遮挡;
12、第一确定模块,用于对所述第一拍摄图像、所述第二拍摄图像进行图像识别,分别确定所述第一拍摄图像、所述第二拍摄图像中各所述标定图像对应的特征点信息;
13、第二确定模块,用于根据所述第一拍摄图像、所述第二拍摄图像中各所述标定图像对应的特征点信息,确定所述双目摄像头对应的目标标定信息,所述目标标定信息包括单目标定信息以及双目立体标定信息;
14、第三确定模块,用于根据所述目标标定信息,基于bouguet算法,分别确定所述第一拍摄图像、所述第二拍摄图像到共面行对准平面的第一转换矩阵和第二转换矩阵;
15、第四确定模块,用于根据所述第一转换矩阵、所述第二转换矩阵,对所述第一拍摄图像、所述第二拍摄图像中所包含的待检测人脸图像进行深度识别,确定所述待检测人脸图像对应的深度信息;
16、处理模块,用于将所述深度信息与所述待检测人脸图像和所述双目摄像头之间的实际距离进行比较,若比较结果满足预定规则,则确定标定结果有效,并将所述目标标定信息、所述第一转换矩阵以及所述第二转换矩阵进行关联存储。
17、根据本申请实施例的一个方面,提供了一种计算机可读介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上述实施例中所述的双目摄像头的标定方法。
18、根据本申请实施例的一个方面,提供了一种电子设备,包括:一个或多个处理器;存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现如上述实施例中所述的双目摄像头的标定方法。
19、根据本申请实施例的一个方面,提供了一种计算机程序产品或计算机程序,该计算机程序产品或计算机程序包括计算机指令,该计算机指令存储在计算机可读存储介质中。计算机设备的处理器从计算机可读存储介质读取该计算机指令,处理器执行该计算机指令,使得该计算机设备执行上述实施例中提供的双目摄像头的标定方法。
20、在本申请的一些实施例所提供的技术方案中,通过获取双目摄像头中的第一摄像头和第二摄像头针对同一拍摄内容分别拍摄到的第一拍摄图像和第二拍摄图像,其中,该拍摄内容包含了多个不同距离设置的标定图像以及一个待校验人脸图像,该标定图像中包含若干纵横等距的特征点且待校验人脸图像与标定图像之间、以及标定图像两两之间互不遮挡,对第一拍摄图像、第二拍摄图像进行图像识别,分别确定第一拍摄图像、第二拍摄图像中各标定图像对应的特征点信息;进而确定双目摄像头对应的目标标定信息,再基于该标定信息,基于bouguet算法,分别确定第一拍摄图像、第二拍摄图像到共面行对准平面的第一转换矩阵和第二转换矩阵,根据该第一转换矩阵、第二转换矩阵,对第一拍摄图像、第二拍摄图像中的待检测人脸图像进行深度识别,确定待检测人脸图像对应的深度信息,以将该深度信息与待检测人脸图像与双目摄像头之间的实际距离进行比较,从而确定标定结果是否有效。由此,通过不同距离设置的多个标定图像,可以满足标定所需的深度信息,并且,双目摄像头只需拍摄一张照片即可实现标定和校验,提高了标定效率的同时也保证了标定结果的准确性。
21、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
技术特征:
1.一种双目摄像头的标定方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,根据所述第一拍摄图像、所述第二拍摄图像中各所述标定图像对应的特征点信息,确定所述双目摄像头对应的目标标定信息,包括:
3.根据权利要求1所述的方法,其特征在于,根据所述第一转换矩阵、所述第二转换矩阵,对所述第一拍摄图像、所述第二拍摄图像中所包含的待检测人脸图像进行深度识别,确定所述待检测人脸图像对应的深度信息,包括:
4.根据权利要求3所述的方法,其特征在于,根据各所述人脸轮廓标记点对应的深度信息,确定所述待检测人脸图像的目标深度信息,包括:
5.根据权利要求1所述的方法,其特征在于,所述标定图像为棋盘格图像,棋盘格图像的角点为所述特征点;
6.根据权利要求5所述的方法,其特征在于,在对所述第一拍摄图像、所述第二拍摄图像中各标定图像所在区域分别进行图像识别,确定所述第一拍摄图像、所述第二拍摄图像中各标定图像对应的角点数量以及角点坐标以作为特征点信息之后,所述方法还包括:
7.一种双目摄像头的标定装置,其特征在于,所述装置包括:
8.根据权利要求7所述的装置,其特征在于,所述第二确定模块用于:
9.一种计算机可读介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6中任一项所述的双目摄像头的标定方法。
10.一种电子设备,其特征在于,包括:
技术总结
本申请的实施例提供了一种双目摄像头的标定方法、装置、计算机可读介质及设备。该方法包括:获取由各摄像头针对同一拍摄内容分别拍摄到的第一拍摄图像和第二拍摄图像;分别确定第一拍摄图像、第二拍摄图像中各标定图像对应的特征点信息以确定双目摄像头对应的目标标定信息,并分别确定各拍摄图像到共面行对准平面的第一转换矩阵和第二转换矩阵;对各拍摄图像中所包含的待检测人脸图像进行深度识别,确定对应的深度信息;将深度信息与实际距离进行比较,以确定标定结果是否有效。本申请实施例的技术方案可以提高双目摄像头的标定效率,并保证标定结果的准确性。
技术研发人员:艾绍华,梅海峰,詹东晖,黄春辉
受保护的技术使用者:厦门瑞为信息技术有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!