船舶航行图像的场景复杂度分类方法、存储介质及装置
本发明涉及智能船舶,尤其涉及一种船舶航行图像的场景复杂度分类方法、存储介质及装置。
背景技术:
1、目前,无人化、智能化的船舶发展的成为如今主流的研究方向,为了时效内智能船舶真正意义上的远程自动或自主驾驶,还需要海量的实船测试数据来验证其航行系统的安全性和可靠性。
2、基于视觉图像的航行场景构建技术具有方案成熟、成本低廉且场景还原程度高等特点,使其被广泛用于全方位、多视角地重构船舶航行场景。在基于视觉图像的航行场景构建过程中,最大的挑战是很难覆盖到那些小概率发生且又高风险的航行场景,即“长尾问题挑战”。
3、上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本发明的主要目的在于提供一种船舶航行图像的场景复杂度分类方法、存储介质及装置,旨在解决在基于视觉图像的航行场景构建中非存在的长尾效应的技术问题。
2、为实现上述目的,本发明提供一种船舶航行图像的场景复杂度分类方法,所述船舶航行图像的场景复杂度分类方法包括以下步骤:
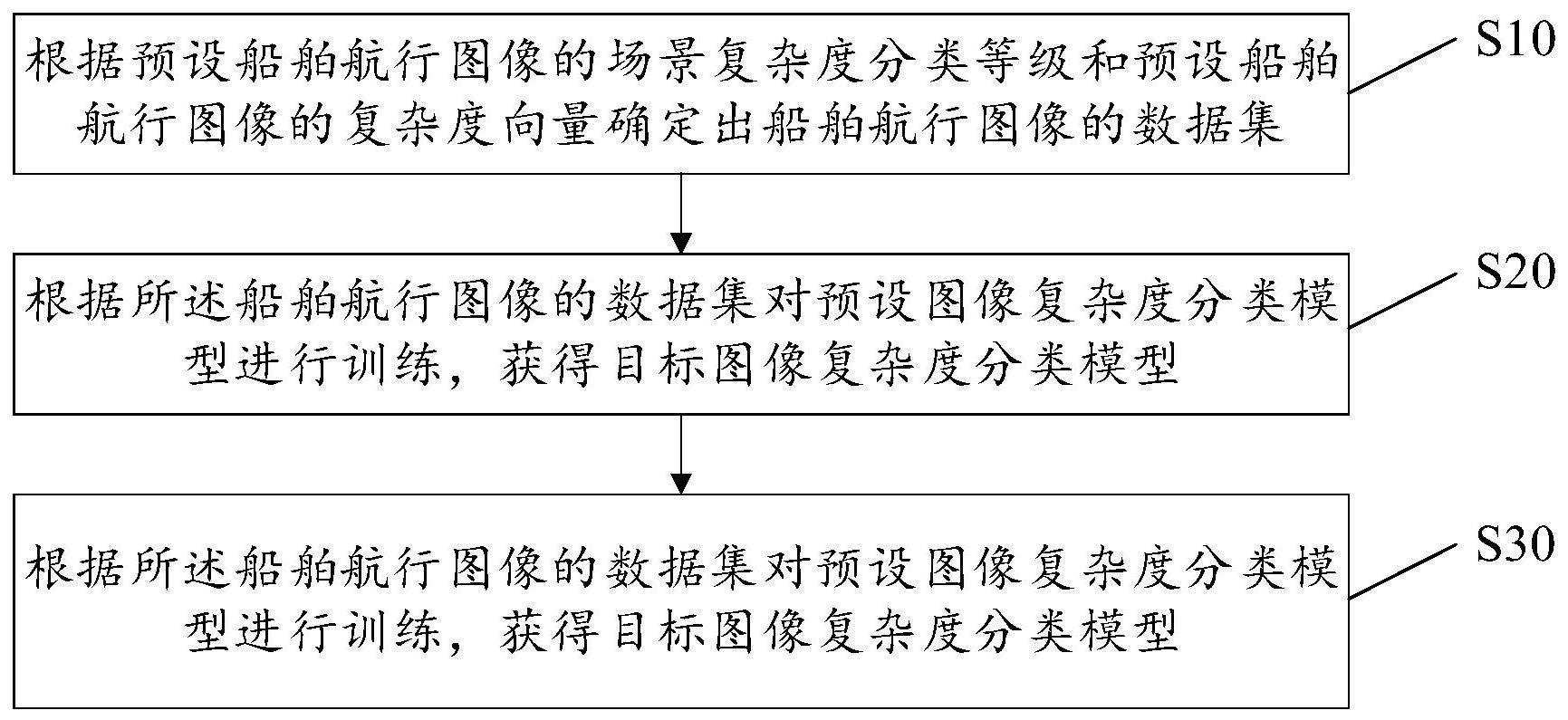
3、根据预设船舶航行图像的场景复杂度分类等级和预设船舶航行图像的复杂度向量确定出船舶航行图像的数据集;
4、根据所述船舶航行图像的数据集对预设图像复杂度分类模型进行训练,获得目标图像复杂度分类模型;
5、根据所述目标图像复杂度分类模型对目标船舶航行图像的数据集进行分类,获得所述目标船舶航行图像的复杂度等级。
6、可选地,所述根据预设船舶航行图像的场景复杂度分类等级和预设船舶航行图像的复杂度向量确定出船舶航行图像的数据集的步骤之前,还包括:
7、根据船舶航行路线获取船舶沿途航行的场景图片;
8、根据所述场景图片的元素特征确定影响船舶航行的复杂因子;
9、根据所述复杂因子确定预设船舶航行图像的场景复杂度分类等级。
10、可选地,根据所述复杂因子确定预设船舶航行图像的场景复杂度分类等级的步骤,包括:
11、对所述复杂因子进行排列组合,并根据复杂因子排列组合的结果确定预设船舶航行图像的场景复杂度分类等级。
12、可选地,所述根据所述复杂因子确定预设船舶航行图像的场景复杂度分类等级的步骤之后,还包括:
13、根据预设图像复杂度算法和所述场景图片确定所述场景图像的灰度分布情况、信息含量、清晰度、局部特征以及特征相似度;
14、根据所述场景图像的灰度分布情况、信息含量、清晰度、局部特征以及特征相似度确定预设船舶航行图像的复杂度向量。
15、可选地,所述根据所述船舶航行图像的数据集对预设图像复杂度分类模型进行训练,获得目标图像复杂度分类模型的步骤,包括:
16、初始化所述船舶航行图像的数据集的权重;
17、根据所述船舶航行图像的数据集对预设图像复杂度分类模型进行训练,获得所述预设图像复杂度分类模型中目标识别层;
18、根据所述目标识别层确定目标图像复杂度分类模型。
19、可选地,所述根据所述船舶航行图像的数据集对预设图像复杂度分类模型进行训练,获得所述预设图像复杂度分类模型中目标识别层的步骤,包括:
20、根据预设图像复杂度分类模型对所述船舶航行图像的数据集的复杂度向量进行分类;
21、根据分类结果更新所述船舶航行图像的数据集的权重;
22、在达到预设分类次数时,根据更新后的权重确定所述预设图像复杂度分类模型中目标识别层。
23、可选地,所述在达到预设分类次数时,根据更新后的权重确定所述预设图像复杂度分类模型中目标识别层的步骤,包括:
24、在达到预设分类次数时,更新所述船舶航行图像的数据集的权重并确定更新后的权重的置信度;
25、确定所述预设图像复杂度分类模型中各识别层的第一权重;
26、根据所述第一权重和所述置信度确定所述预设图像复杂度分类模型中目标识别层。
27、此外,为实现上述目的,本发明还提出一种船舶航行图像的场景复杂度分类设备,所述船舶航行图像的场景复杂度分类设备包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行船舶航行图像的场景复杂度分类程序,所述船舶航行图像的场景复杂度分类程序配置为实现如上文所述的船舶航行图像的场景复杂度分类方法。
28、此外,为实现上述目的,本发明还提出一种存储介质,所述存储介质上存储有船舶航行图像的场景复杂度分类程序,所述船舶航行图像的场景复杂度分类程序被处理器执行时实现如上文所述的船舶航行图像的场景复杂度分类方法。
29、此外,为实现上述目的,本发明还提出一种船舶航行图像的场景复杂度分类装置,所述船舶航行图像的场景复杂度分类装置包括:数据集确定模块、模型确定模块、等级划分模块;
30、所述数据集确定模块,用于根据预设船舶航行图像的场景复杂度分类等级和预设船舶航行图像的复杂度向量确定出船舶航行图像的数据集;
31、所述模型确定模块,用于根据所述船舶航行图像的数据集对预设图像复杂度分类模型进行训练,获得目标图像复杂度分类模型;
32、所述等级划分模块,用于根据所述目标图像复杂度分类模型对目标船舶航行图像的数据集进行分类,获得所述目标船舶航行图像的复杂度等级。
33、本发明公开了一种船舶航行图像的场景复杂度分类方法、存储介质及装置,该方法包括:根据预设船舶航行图像的场景复杂度分类等级和预设船舶航行图像的复杂度向量确定出船舶航行图像的数据集;根据船舶航行图像的数据集对预设图像复杂度分类模型进行训练,获得目标图像复杂度分类模型;根据目标图像复杂度分类模型对目标船舶航行图像的数据集进行分类,获得目标船舶航行图像的复杂度等级。由于本发明根据船舶航行图像的数据集中存在复杂度分类等级和复杂度向量的对应关系,由此得到的目标图像复杂度分类模型能感知船舶航行场景的复杂度,所以通过所述模型能够得到目标船舶航行图像的复杂度等级,从而能解决在视觉图像的航行场景构建中出现的长尾效应。
技术特征:
1.一种船舶航行图像的场景复杂度分类方法,其特征在于,所述船舶航行图像的场景复杂度分类方法包括以下步骤:
2.如权利要求1所述的船舶航行图像的场景复杂度分类方法,其特征在于,所述根据预设船舶航行图像的场景复杂度分类等级和预设船舶航行图像的复杂度向量确定出船舶航行图像的数据集的步骤之前,还包括:
3.如权利要求2所述的船舶航行图像的场景复杂度分类方法,其特征在于,根据所述复杂因子确定预设船舶航行图像的场景复杂度分类等级的步骤,包括:
4.如权利要求2所述的船舶航行图像的场景复杂度分类方法,其特征在于,所述根据所述复杂因子确定预设船舶航行图像的场景复杂度分类等级的步骤之后,还包括:
5.如权利要求1所述的船舶航行图像的场景复杂度分类方法,其特征在于,所述根据所述船舶航行图像的数据集对预设图像复杂度分类模型进行训练,获得目标图像复杂度分类模型的步骤,包括:
6.如权利要求5所述的船舶航行图像的场景复杂度分类方法,其特征在于,所述根据所述船舶航行图像的数据集对预设图像复杂度分类模型进行训练,获得所述预设图像复杂度分类模型中目标识别层的步骤,包括:
7.如权利要求5所述的船舶航行图像的场景复杂度分类方法,其特征在于,所述在达到预设分类次数时,根据更新后的权重确定所述预设图像复杂度分类模型中目标识别层的步骤,包括:
8.一种船舶航行图像的场景复杂度分类设备,其特征在于,所述船舶航行图像的场景复杂度分类设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的船舶航行图像的场景复杂度分类程序,所述船舶航行图像的场景复杂度分类程序被所述处理器执行时实现如权利要求1至7中任一项所述的船舶航行图像的场景复杂度分类方法的步骤。
9.一种存储介质,其特征在于,所述存储介质上存储有船舶航行图像的场景复杂度分类程序,所述船舶航行图像的场景复杂度分类程序被处理器执行时实现如权利要求1至7中任一项所述的船舶航行图像的场景复杂度分类方法的步骤。
10.一种船舶航行图像的场景复杂度分类装置,其特征在于,所述船舶航行图像的场景复杂度分类装置包括:数据集确定模块、模型确定模块、等级划分模块;
技术总结
本发明公开了一种船舶航行图像的场景复杂度分类方法、存储介质及装置,该方法包括:根据预设船舶航行图像的场景复杂度分类等级和预设船舶航行图像的复杂度向量确定出船舶航行图像的数据集;根据船舶航行图像的数据集对预设图像复杂度分类模型进行训练,获得目标图像复杂度分类模型;根据目标图像复杂度分类模型对目标船舶航行图像的数据集进行分类,获得目标船舶航行图像的复杂度等级。由于本发明根据船舶航行图像的数据集中存在复杂度分类等级和复杂度向量的对应关系,由此得到的目标图像复杂度分类模型能感知船舶航行场景的复杂度,所以通过所述模型能够得到目标船舶航行图像的复杂度等级,从而解决视觉图像的航行场景构建中出现的长尾效应。
技术研发人员:石兵华,李睿恒,何舟,易娜,吴家兴,曹盼
受保护的技术使用者:湖北经济学院
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!