一种垃圾回收系统的制作方法
本发明涉及垃圾搬运的,尤其是一种垃圾回收系统。
背景技术:
1、随着垃圾分类的大力推行,目前多个城市,多个社区及小区都设置垃圾分类垃圾桶,然而让市民适应这种垃圾分类的政策还是得需要一段很长的时间,目前倒垃圾及垃圾回收过程中存在的不足在于:1.垃圾桶设置在固定的位置,位置距离生活区较近,则容易影响到居民的生活环境,距离太远则造成倒垃圾不方便;2.垃圾分类识别过程复杂,容易造成混淆,3.虽然在多个社区设置分类垃圾桶,但使用过程不容易监督。
2、另外,市政垃圾车进行垃圾回收时也无法预测各类垃圾的容量,容易造成搬运能力过剩,做成资源浪费。
技术实现思路
1、本发明的目的在于克服现有技术的不足,提供一种便捷、智能化程度高的垃圾回收系统.
2、为了达到上述目的,本发明采用以下技术方案:
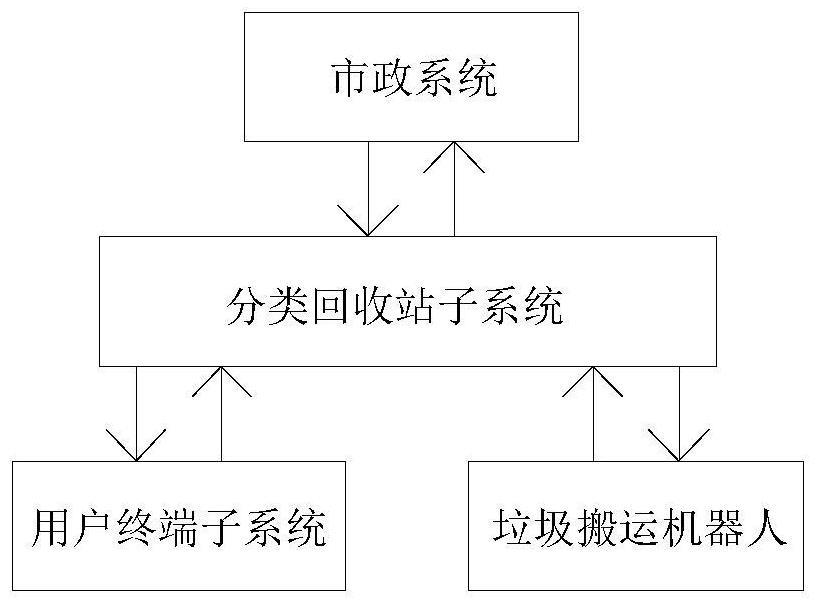
3、一种垃圾回收系统,包括用户终端子系统、分类回收站子系统和垃圾搬运机器人;所述用户终端子系统用于为用户提供垃圾回收下单服务,用户通过用户终端子系统生成垃圾回收终端任务;所述分类回收站子系统用于接收用户终端子系统生成的垃圾回收终端任务,并根据终端任务指定垃圾搬运机器人执行垃圾回收任务;所述垃圾搬运机器人用于执行垃圾回收任务,当到达回收点,通过分类回收站子系统发送机器人到达通知信息给用户终端。
4、优选的,所述用户终端子系统包括回收请求模块、垃圾信息填报模块、回收预约模块和计费查询模块;所述回收请求模块用于向分类回收站子系统发送垃圾回收的确定请求;所述垃圾信息填报模块用于填报垃圾的类型确定;所述回收预约模块用于设定上门收垃圾的具体时间;所述计费查询模块用于查询和计算本次垃圾搬运的费用信息。
5、优选的,所述垃圾信息填报模块还包括模糊信息采集单元,所述模糊信息采集单元用于选项式采集垃圾信息。
6、优选的,所述分类回收站子系统还包括垃圾容量检测模块和机器人状态检测模块;所述垃圾容量检测模块用于检测目前站内的垃圾容量情况,当垃圾容量超过阈值时,发送信息给市政系统前往回收;当检测到某类垃圾超过阈值时,将该类垃圾设定为暂停回收状态并停止接收该类垃圾回收的终端任务;所述机器人状态检测模块用于检测机器人的状态信息,并将状态正常的机器人列入工作队列,将状态异常的机器人进行人工设定。
7、优选的,所述人工设定包括将机器人设定为继续工作状态、屏蔽功能继续工作状态、人工控制状态和中止运行状态。
8、优选的,所述分类回收站子系统在指定垃圾搬运机器人执行垃圾回收任务时,使垃圾搬运机器人先到分类回收站子系统提取与所述垃圾回收任务相适应的垃圾桶。
9、优选的,所述垃圾搬运机器人设有视觉感知模块、垃圾桶盖板机构和运行环境状态信息收集模块;所述视觉感知模块用于辅助导航行走、运行环境评估及反馈、圾桶装载状态监控和行车记录及信息交互;所述垃圾桶盖板机构为透明有机玻璃盖板用于封盖垃圾搬运机器人上的垃圾桶,分类回收站子系统通过垃圾桶盖板的盖合状态信息获知垃圾桶内垃圾的状态信息;所述运行环境状态信息收集模块用于检测运行的环境信息,并实时反馈分类回收站子系统,如检测到下雨或路面湿滑等情况的实时反馈。
10、优选的,所述分类回收站子系统还包括信息统计模块用于统计各时间段的机器人运行频率以及各分类垃圾的收集总量及频率,以便给用户终端子系统推送更合理的预约时间,给市政系分配更合理的车型及时间段来进行来垃圾回收。
11、与现有技术相比,本发明采用自动化搬运,有效降低了人力运输成本,便捷了居民的生活方式;在同一个小区、社区或一定范围内,只需设计一个回收主站即可,可以减小垃圾桶的设置数量,改善居民的生活环境;通过手机预约方式进行垃圾分类回收,让居民能够更容易地实现垃圾分类回收,提高了垃圾分类实行的准确性;垃圾主站的容量状态可以实时监测,当容量满时才会上级发送请求信号,增加了市政垃圾车辆回收垃圾的效率。
技术特征:
1.一种垃圾回收系统,其特征在于:包括用户终端子系统、分类回收站子系统和垃圾搬运机器人;
2.根据权利要求1所述的一种垃圾回收系统,其特征在于:所述用户终端子系统包括回收请求模块、垃圾信息填报模块、回收预约模块和计费查询模块;
3.根据权利要求2所述的一种垃圾回收系统,其特征在于:所述垃圾信息填报模块还包括模糊信息采集单元,所述模糊信息采集单元用于选项式采集垃圾信息。
4.根据权利要求1所述的一种垃圾回收系统,其特征在于:所述分类回收站子系统还包括垃圾容量检测模块和机器人状态检测模块;
5.根据权利要求4所述的一种垃圾回收系统,其特征在于:所述人工设定包括将机器人设定为继续工作状态、屏蔽功能继续工作状态、人工控制状态和中止运行状态。
6.根据权利要求1所述的一种垃圾回收系统,其特征在于:所述分类回收站子系统在指定垃圾搬运机器人执行垃圾回收任务时,使垃圾搬运机器人先到分类回收站子系统提取与所述垃圾回收任务相适应的垃圾桶。
7.根据权利要求1所述的一种垃圾回收系统,其特征在于:所述垃圾搬运机器人设有视觉感知模块、垃圾桶盖板机构和运行环境状态信息收集模块;
8.根据权利要求1所述的一种垃圾回收系统,其特征在于:所述分类回收站子系统还包括信息统计模块用于统计各时间段的机器人运行频率以及各分类垃圾的收集总量及频率,以便给用户终端子系统推送更合理的预约时间,给市政系分配更合理的车型及时间段来进行来垃圾回收。
技术总结
垃圾搬运机器人控制系统,包括用户终端子系统、分类回收站子系统和垃圾搬运机器人;用户终端子系统用于为用户提供垃圾回收下单服务,用户通过用户终端子系统生成垃圾回收终端任务;分类回收站子系统用于接收用户终端子系统生成的垃圾回收终端任务,并根据终端任务指定垃圾搬运机器人执行垃圾回收任务;垃圾搬运机器人用于执行垃圾回收任务,当到达回收点,通过分类回收站子系统发送机器人到达通知信息给用户终端。本发明采用自动化搬运,有效降低了人力运输成本,便捷了居民的生活方式;在同一个小区内,只需设计一个回收主站即可,可以减小垃圾桶的设置数量,改善居民的生活环境。
技术研发人员:崔俊健
受保护的技术使用者:广东嘉腾机器人自动化有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!