基于球谐变换和迭代优化的全局配准方法
本发明涉及一种全局配准方法。
背景技术:
1、全局配准即对于两个有重合的在不同坐标系下的点云数据,寻找最优的坐标系转换方式来让两个点云数据重合。点云的全局配准广泛应用于那些缺乏初始定位或者对算法稳定程度要求高的领域,例如运动估计、三维重建、三维物体识别、三维物体检测无人驾驶和智能机器人领域中。
2、由于配准优化问题的非凸性,传统算法容易陷入局部极小值中。全局配准方法通过理论上的证明保证了算法结果一定收敛到全局最优解。现有的全局配准算法主要分为两部分:基于特征点对应关系的和基于原始点云数据的。现有的全局配准的实现要么需要很长时间来缩小搜索范围,要么无法获得足够的准确性。因此,对于速度更快、精度要求更高的应用场景,它们难以运用到实际场景中。对于一个好的全局配准算法,它应该满足以下四个条件:
3、1)该算法应关注原始点云而不是特征点,以保持高精度;
4、2)该算法的算法复杂度应该比现有的算法更低;
5、3)该算法应该保证在初始的运算中,搜索域应该快速缩小到全局最优域;
6、4)该算法处理高精度需求的应用场景时,应该加快收敛速度,也就是应该减少后续迭代次数,并删除冗余搜索域。
技术实现思路
1、本发明要解决的技术问题是:现有的全局配准的实现要么需要很长时间来缩小搜索范围,要么无法获得足够的准确性。
2、为了解决上述技术问题,本发明的技术方案是提供了一种基于球谐变换和迭代优化的全局配准方法,其特征在于,假设:第一、预定义输入点云中正确匹配对的最小百分比,表示为点云离群值的数量限制;第二、用于确定正确匹配对的距离阈值是由场景预设的,表示为点云离群值的限制距离,则所述全局配准提取方法包括以下步骤:
3、步骤1、通过球面谐波在频域中根据第二点假设对齐点云,并基于相位差的峰值以及第一点假设确定若干小的点云搜索域;
4、步骤2、通过分析搜索域的命中率和搜索时间来为步骤1确定的若干点云搜索域分配搜索的先后顺序,其中:
5、命中率估计公式如下式所示:
6、
7、式中:lb表示下界,nin表示点云匹配对的数量,residuali表示第i个匹配对的匹配误差,radius表示搜索域的半径,c是常数,caf是中心化衰减因素;r表示搜索域的半径,f(·)表示可选择函数;e*表示当前最优的优化函数大小;
8、搜索时间估计公式如下式所示:
9、ft(r)=ro*(lb-e*)
10、式中:o为可选择参数;
11、步骤3、用分支定界法按照步骤2确定的顺序依次在若干点云搜索域中搜索,搜索时,若最优解不在当前搜索域内,则通过分支定界法会排除当前搜索域,如果最优解在当前搜索域内,则通过分支定界法找到最优的解,其中,在分支定界的过程中引入了下式所示的检查条件:
12、nin≤ht*n
13、式中,ht指的是假设一中点云匹配对的数量比例,n表示输入点云的大小。
14、优选地,所述步骤1包括以下步骤:
15、步骤101、将两个输入点云进行体素化并加以球面调和变换,得到了两个输入点云的频域信号,其中:
16、将两个输入点云进行体素化时所采用的体素化公式如下式所示:
17、
18、式中:f([x,y,z]t)是得到的体素化的点云,可以被视为函数;pc为输入点云;max表示输入点云中点的最大范数;
19、采用下式计算球面调和变换:
20、
21、
22、
23、式中:(x,y,z)表示点的坐标,m表示球面调和函数上标,l表示球面调和函数下标,表示球面调和函数,表示伴随勒让德多项式,d表示微分,f即为f([x,y,z]t),表示球面调和函数基系数;
24、通过计算球面调和变换的方式,得到的结果为
25、步骤102、计算这两个输入点云的频域信号的标准相关性函数scr(g),如下式所示:
26、scr(g)=∫x,y,zmsa(g)tadxdydz
27、
28、
29、式中:msa(g)即为表示模型点云的球面调和基系数矩阵,(α,β,γ)表示旋转对应的欧拉角,km和l表示上下标,会在求和中消除,表示维格纳函数,dkml表示维格纳分布函数。
30、步骤103、找到标准相关性函数的所有局部最大值,根据这个局部极大值的误差函数值计算搜索域的半径大小,其中,对于某个局部极大值,其对应的搜索域半径是其中,e为该局部极大值对应的优化函数大小,d为假设二中的点云离群值的限制距离。
31、优选地,所述分支定界法的实现包括以下步骤:对于每个搜索域,计算当前搜索域中心的误差函数值,通过该误差函数值估计当前搜索域的函数下界:如果函数下界大于已有最好结果,那么排除该搜索域;否则,将当前搜索域分裂成小搜索域递归进行这一过程,当搜索域的大小小于目标精度要求时,搜索域的中心点即是所求的最优解。
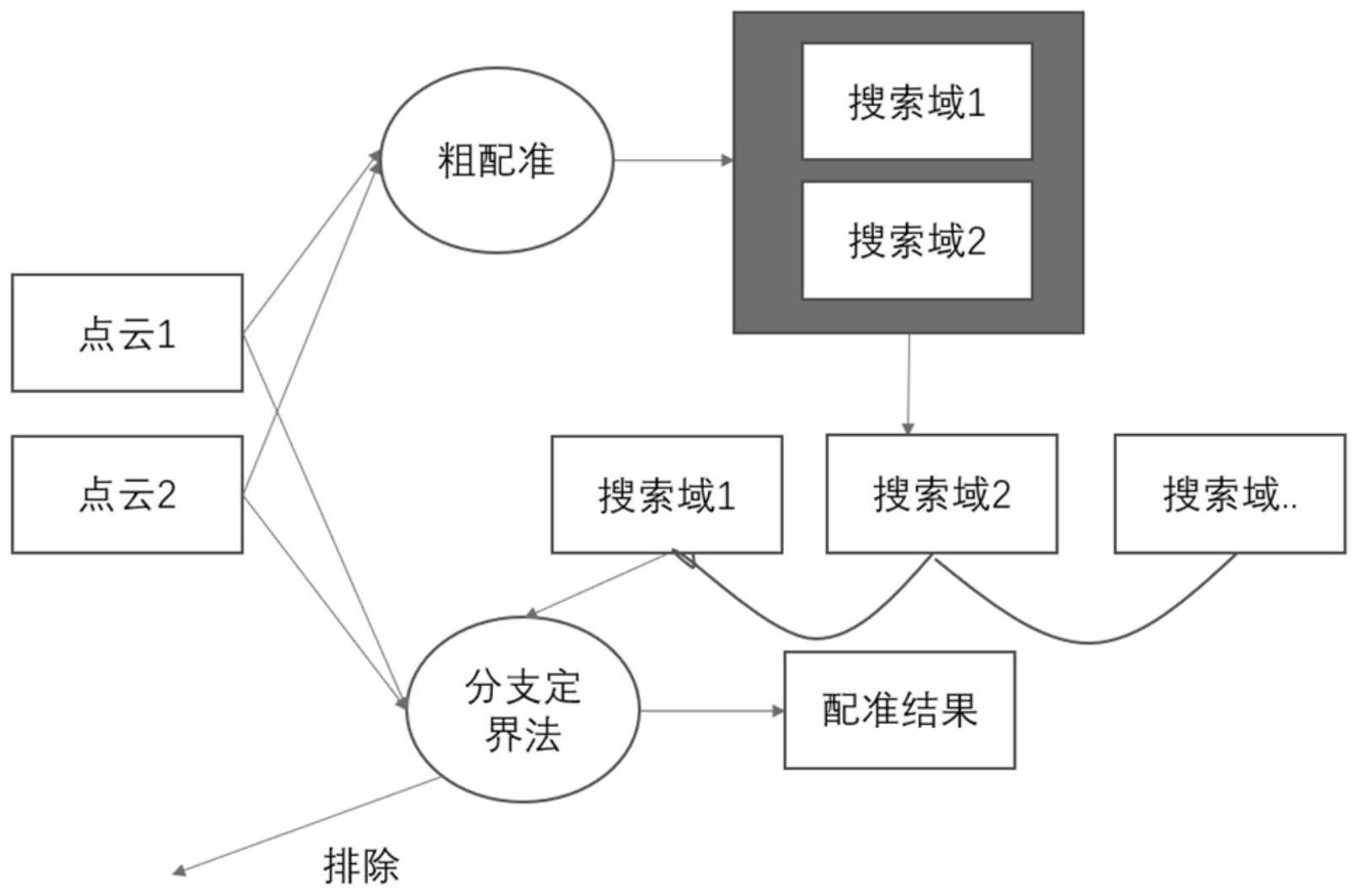
32、在本发明提供的算法中,点云先经过粗配准得到若干搜索域,然后使用评估标准对于搜索域进行排序,使用分支定界法排除不正确的搜索域并得出最终的配准结果。本发明公开的算法可以应用于三维重建。由于在相同精度下本发明的算法比目前所有的全局配准算法更快,所以对三维重建在相同时间内,本发明能达到比目前所有算法更高的精度。
技术特征:
1.一种基于球谐变换和迭代优化的全局配准方法,其特征在于,假设:第一、预定义输入点云中正确匹配对的最小百分比,表示为点云离群值的数量限制;第二、用于确定正确匹配对的距离阈值是由场景预设的,表示为点云离群值的限制距离,则所述全局配准提取方法包括以下步骤:
2.如权利要求1所述的一种基于球谐变换和迭代优化的全局配准方法,其特征在于,所述步骤1包括以下步骤:
3.如权利要求1所述的一种基于球谐变换和迭代优化的全局配准方法,其特征在于,所述分支定界法的实现包括以下步骤:对于每个搜索域,计算当前搜索域中心的误差函数值,通过该误差函数值估计当前搜索域的函数下界:如果函数下界大于已有最好结果,那么排除该搜索域;否则,将当前搜索域分裂成小搜索域递归进行这一过程,当搜索域的大小小于目标精度要求时,搜索域的中心点即是所求的最优解。
技术总结
本发明的技术方案是提供了一种基于球谐变换和迭代优化的全局配准方法,其特征在于,假设:第一、预定义输入点云中正确匹配对的最小百分比,表示为点云离群值的数量限制;第二、用于确定正确匹配对的距离阈值是由场景预设的,表示为点云离群值的限制距离。在本发明提供的算法中,点云先经过粗配准得到若干搜索域,然后使用评估标准对于搜索域进行排序,使用分支定界法排除不正确的搜索域并得出最终的配准结果。本发明公开的算法可以应用于三维重建。由于在相同精度下本发明的算法比目前所有的全局配准算法更快,所以对三维重建在相同时间内,本发明能达到比目前所有算法更高的精度。
技术研发人员:何成章,哈亚军
受保护的技术使用者:上海科技大学
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!