地理数据高程信息的模糊处理方法及装置与流程
本发明涉及电子地图,尤其涉及一种地理数据高程信息的模糊处理方法及装置。
背景技术:
1、对于自动驾驶,地理数据高程信息的变化值是非常重要的一个信息,有助于车辆更好的进行纵横向控制,例如:在自动驾驶应用中需要根据相邻地物的高程差来判断坡度信息,决定驾驶策略。但是地理数据高程信息的真实绝对值(即绝对海拔高度)是属于需要保护的商业信息,在电子地图中,地理数据高程信息的真实绝对值不能前端显示,也不能后台存储。因此,在电子地图中,自动驾驶中应用地理数据高程信息时,如何能够将高程信息统一模糊化,且保证高程差变化梯度基本不变,同时又能够不显示和存储高程信息绝对值是目前亟待解决的技术问题。
技术实现思路
1、本发明提供一种地理数据高程信息的模糊处理方法及装置,用以解决现有技术中存在的上述技术问题。
2、本发明提供一种地理数据高程信息的模糊处理方法,包括:
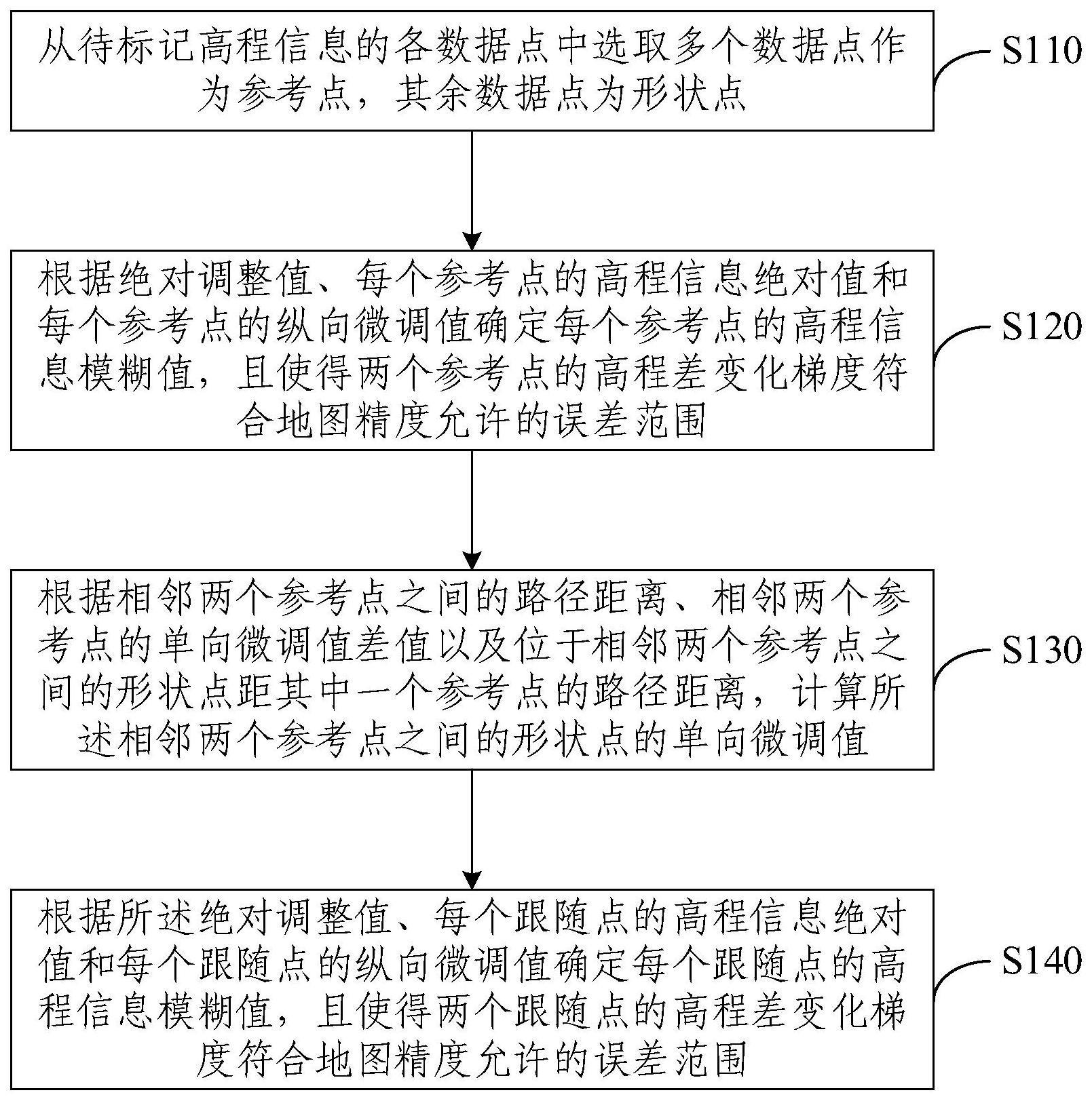
3、从待标记高程信息的各形状点中选取多个形状点作为参考点,其余形状点为跟随点;
4、根据绝对调整值、每个参考点的高程信息绝对值和每个参考点的纵向微调值确定每个参考点的高程信息模糊值,且使得两个参考点的高程差变化梯度符合地图精度允许的误差范围;
5、根据相邻两个参考点之间的路径距离、相邻两个参考点的纵向微调值差值以及位于相邻两个参考点之间的跟随点距其中一个参考点的路径距离,计算所述相邻两个参考点之间的跟随点的纵向微调值;
6、根据所述绝对调整值、每个跟随点的高程信息绝对值和每个跟随点的纵向微调值确定每个跟随点的高程信息模糊值,且使得两个跟随点的高程差变化梯度符合地图精度允许的误差范围,
7、其中,所述高程差变化梯度为两个形状点的高程差变化量与所述两个形状点之间路径距离的比值。
8、根据本发明提供的一种地理数据高程信息的模糊处理方法,从待标记高程信息的各形状点中选取多个形状点作为参考点,其余形状点为跟随点,包括:
9、采用预设大小的网格对地图进行划分;
10、在每个网格中心处确定一个缓冲区域;
11、选取缓冲区域内的一个形状点作为参考点,其余形状点为跟随点。
12、根据本发明提供的一种地理数据高程信息的模糊处理方法,所述绝对调整值大于等于所有形状点的高程信息绝对值中最大值和最小值之差的1/10。
13、根据本发明提供的一种地理数据高程信息的模糊处理方法,所述参考点的纵向微调值的范围为[-h/2,h/2],h与两两相邻的参考点之间水平距离最小值的比值不超过1/1000。
14、根据本发明提供的一种地理数据高程信息的模糊处理方法,根据绝对调整值、每个参考点的高程信息绝对值和每个参考点的纵向微调值确定每个参考点的高程信息模糊值,包括:
15、对于每个参考点,在其高程信息绝对值基础上增加所述绝对调整值和参考点对应的纵向微调值,以得到每个所述参考点的高程信息模糊值。
16、根据本发明提供的一种地理数据高程信息的模糊处理方法,根据相邻两个参考点之间的路径距离、相邻两个参考点的纵向微调值差值以及位于相邻两个参考点之间的跟随点距其中一个参考点的路径距离,计算所述相邻两个参考点之间的跟随点的纵向微调值,包括:
17、确定相邻两个参考点之间的路径距离,以及相邻两个参考点之间的跟随点距其中一个参考点的路径距离;
18、根据相邻两个参考点之间的跟随点距其中一个参考点的路径距离与相邻两个参考点之间的路径距离的比值,以及相邻两个参考点的纵向微调值差值计算述相邻两个参考点之间的跟随点的纵向微调值
19、根据本发明提供的一种地理数据高程信息的模糊处理方法,在根据绝对调整值、每个跟随点的高程信息绝对值和每个跟随点的纵向微调值确定每个跟随点的高程信息模糊值之后,还包括:
20、获取两个相邻跟随点之间的间隔路径距离,根据所述间隔路径距离确定随机波动值范围[-r/2,r/2],且r与间隔路径距离的比值不超过1/1000;
21、在跟随点的高程信息模糊值基础上增加随机波动值,作为跟随点的高程信息最终的模糊值。
22、根据本发明提供的一种地理数据高程信息的模糊处理装置,包括:
23、参考点选取模块,用于从待标记高程信息的各形状点中选取多个形状点作为参考点,其余形状点为跟随点;
24、第一模糊值确定模块,用于根据绝对调整值、每个参考点的高程信息绝对值和每个参考点的纵向微调值确定每个参考点的高程信息模糊值,且使得两个参考点的高程差变化梯度符合地图精度允许的误差范围;
25、微调值计算模块,用于根据相邻两个参考点之间的路径距离、相邻两个参考点的纵向微调值差值以及位于相邻两个参考点之间的跟随点距其中一个参考点的路径距离,计算所述相邻两个参考点之间跟随点的纵向微调值;
26、第二模糊值确定模块,用于根据所述绝对调整值、每个跟随点的高程信息绝对值和每个跟随点的纵向微调值确定每个跟随点的高程信息模糊值,且使得两个跟随点的高程差变化梯度符合地图精度允许的误差范围,
27、其中,所述高程差变化梯度为两个形状点的高程差变化量与所述两个形状点之间路径距离的比值。
28、本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述的地理数据高程信息的模糊处理方法。
29、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述的地理数据高程信息的模糊处理方法。
30、本发明提供的地理数据高程信息的模糊处理方法及装置,通过在待标记高程信息的各形状点的高程信息绝对值基础上增加统一的绝对调整值和各形状点的纵向微调值,从而将高程信息绝对值模糊化,由于有统一的绝对调整值,且各自的纵向微调值保证各形状点高程差变化梯度基本不变,即符合地图精度允许的误差范围。模糊后的高程信息模糊值用于地图显示和存储,不需要显示和存储高程信息绝对值。而且各自的纵向微调值的不同,不能通过单点或多点测量的方式来反推得到形状点高程信息绝对值,起到了保密作用。
技术特征:
1.一种地理数据高程信息的模糊处理方法,其特征在于,包括:
2.根据权利要求1所述的地理数据高程信息的模糊处理方法,其特征在于,从待标记高程信息的各形状点中选取多个形状点作为参考点,其余形状点为跟随点,包括:
3.根据权利要求1所述的地理数据高程信息的模糊处理方法,其特征在于,所述绝对调整值大于等于所有形状点的高程信息绝对值中最大值和最小值之差的1/10。
4.根据权利要求1所述的地理数据高程信息的模糊处理方法,其特征在于,所述参考点的纵向微调值的范围为[-h/2,h/2],h与两两相邻的参考点之间水平距离最小值的比值不超过1/1000。
5.根据权利要求1所述的地理数据高程信息的模糊处理方法,其特征在于,根据绝对调整值、每个参考点的高程信息绝对值和每个参考点的纵向微调值确定每个参考点的高程信息模糊值,包括:
6.根据权利要求1所述的地理数据高程信息的模糊处理方法,其特征在于,根据相邻两个参考点之间的路径距离、相邻两个参考点的纵向微调值差值以及位于相邻两个参考点之间的跟随点距其中一个参考点的路径距离,计算所述相邻两个参考点之间的跟随点的纵向微调值,包括:
7.根据权利要求1~6中任一项所述的地理数据高程信息的模糊处理方法,其特征在于,在根据绝对调整值、每个跟随点的高程信息绝对值和每个跟随点的纵向微调值确定每个跟随点的高程信息模糊值之后,还包括:
8.一种地理数据高程信息的模糊处理装置,其特征在于,包括:
9.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1~7中任一项所述的地理数据高程信息的模糊处理方法。
10.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1~7中任一项所述的地理数据高程信息的模糊处理方法。
技术总结
本发明涉及电子地图技术领域,提供一种地理数据高程信息的模糊处理方法及装置,该方法包括:从待标记高程信息的各形状点中选取多个形状点作为参考点,其余形状点为跟随点;根据绝对调整值及每个参考点的高程信息绝对值和每个参考点的纵向微调值确定每个参考点的高程信息模糊值;根据相邻两个参考点之间的路径距离、相邻两个参考点的纵向微调值差值以及位于相邻两个参考点之间的跟随点距其中一个参考点的路径距离,计算所述相邻两个参考点之间的跟随点的纵向微调值;根据绝对调整值及每个跟随点的高程信息绝对值和每个跟随点的纵向微调值确定每个跟随点的高程信息模糊值。本发明能够有效地对高程信息绝对值模糊化。
技术研发人员:常鹏飞
受保护的技术使用者:嬴彻星创智能科技(上海)有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!