一种基于计算机视觉的目标跟踪系统的制作方法
本发明属计算机视觉,具体涉及一种基于计算机视觉的目标跟踪系统。
背景技术:
1、随着计算机技术的快速发展,计算机已不再简单局限于计算等功能了,计算机在许多领域都有不同的应用,其中计算机视觉就是关于计算机功能的扩展,计算机视觉技术就是指用摄影机和电脑代替人眼对目标进行识别、跟踪和测量等,并进一步进行图形处理,使电脑处理成为更适合人眼观察或传送给仪器检测的图像。
2、中国专利cn106709456b公开了一种基于计算机视觉的无人机目标跟踪框初始化方法,解决传统技术采用人为选取初始跟踪框的方式可能存在初始框包含过多无用背景信息造成干扰或者包含有用信息不足而影响准确性的问题。在用户手动选取初始框后,对初始框进行自适应放大产生填充框,并产生填充框的轮廓响应图,然后在填充框内对初始框做多尺寸窗口滑动产生不同大小的窗口,最后对这些窗口进行筛选后,利用数字图像的边缘响应图,分析不同窗口内的轮廓密度,并进行评分排序,从中挑选出最优的目标跟踪框。但现有的计算机视觉跟踪系统,在对目标图形进行识别时,并未采用机器深度学习技术,导致在识别过程中,要同时识别多个不同目标物时,无法完成快速识别物的切换,同时,无法对于目标物进行轨迹预判,识别效果不佳,为了解决这一问题,亟待需要一种基于计算机视觉的目标跟踪方法及系统。
技术实现思路
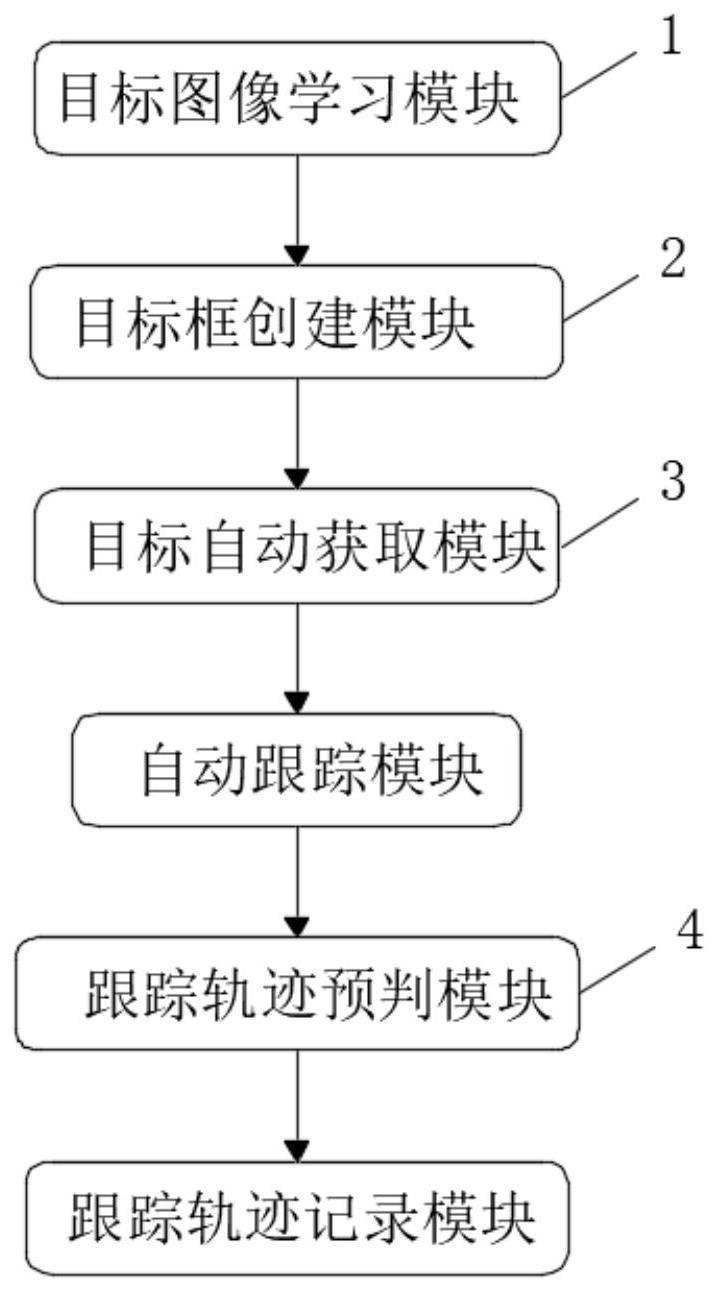
1、为了克服现有技术的不足,本发明提供一种基于计算机视觉的目标跟踪系统。包括目标图像学习模块、目标框创建模块、目标自动获取模块、自动跟踪模块、跟踪轨迹预判模块、跟踪轨迹记录模块,能够实现依赖于深度学习的计算机视觉目标跟踪功能,解决解决光照不均匀、模板中外点较多与旋转变形等多种复杂条件下目标跟踪问题,具有自主学习、准确,抗干扰强等特点。
2、一种基于计算机视觉的目标跟踪系统,其特征在于包括:目标图像学习模块、目标框创建模块、目标自动获取模块、自动跟踪模块、跟踪轨迹预判模块、跟踪轨迹记录模块,其中,目标图像学习模块包括顺序连接的目标图像获取模块、图像特征提取模块、图像特征点标记模块、特征点连接模块和机器深度学习模块,输入可见光或者红外摄像头获取到的图像经目标图像学习模块,输出目标信息提取后的图像;目标框创建模块包括顺序连接的目标跟踪距离获取模块、目标移动速率获取模块、目标大小获取模块、目标框大小调节模块和目标框生成模块,目标图像学习模块输出的目标信息提取后的图像经目标框创建模块,输出带有符合目标大小的目标框的图像;目标自动获取模块包括顺序连接的跟踪目标空间转换模块、目标三维特征构建模块、三维目标特征值获取模块、滤波跟踪计算模块和目标框点相应模块,目标框创建模块输出的带有目标框的图像经目标自动获取模块,输出完成目标框选的图像;目标自动获取模块输出的图像经自动跟踪模块,输出实时动态跟踪效果图像;跟踪轨迹预判模块包括顺序连接的目标运动轨迹扑捉模块、运动轨迹点绘制模块、运动轨迹分析模块、运动规律获取模块和运动轨迹预判模块,自动跟踪模块输出的实时动态跟踪效果图像经跟踪轨迹预判模块,输出预判的目标位置信息;跟踪轨迹预判模块输出的预判目标位置信息至跟踪轨迹记录模块进行跟踪信息实时记录;
3、所述的目标图像获取模块将可见光或红外摄像头获取的原始图像信息转换为跟踪系统可识别的数据;
4、所述的图像特征提取模块对图像进行特征信息提取,得到图像的特征信息;
5、所述的图像特征点标记模块对图像的特征信息进行标记,得到标记完成的图像信息;
6、所述的特征点连接模块对标记的特征点进行连接处理,构成图像中目标的边界;
7、所述的机器深度学习模块对目标提取后的图像采用滑动窗口方式统计模板点与目标点互为最近邻特征的匹配数量,得到置信图,将匹配数量最多的窗口视为最终匹配位置,对生成的置信图进行阈值筛选和滤波,得到清晰准确的目标信息提取后图像;所述的特征包括颜色、深度;
8、所述的目标跟踪距离获取模块对目标的位置进行映射处理,得到目标的移动距离信息;
9、所述的目标移动速率获取模块进行目标移动距离和时间的比例处理,得到目标的移动速率;
10、所述的目标大小获取模块对目标的特征点位置进行捕获处理,得到目标的大小;
11、所述的目标框大小调节模块对目标不同姿态的特征信息进行捕获处理,得到不同大小的目标框;
12、所述的目标框生成模块根据目标信息生成目标对应大小及位置的目标框;
13、所述的跟踪目标空间转换模块对捕获的目标信息映射到现实空间,得到其在真实世界的坐标信息;
14、所述的目标三维特征构建模块对目标的三维特征进行提取,并构建三维特征模型,得到目标三维特征模型;
15、所述的三维目标特征值获取模块对已经构建的三维特征模型进行特征值提取,得到三维目标特征值;
16、所述的滤波跟踪计算模块对滤波范围外的特征值进行剔除处理,得到清晰准确的目标特征信息;
17、所述的目标框点相应模块对目标框及目标点图层进行叠处理,得到目标框点的图像数据;
18、所述的目标运动轨迹扑捉模块对图像中的目标进行运动轨迹捕捉处理,得到目标运动轨迹数据;
19、所述的运动轨迹点绘制模块对运动轨迹图层与目标图层进行叠加处理,得到目标轨迹点;
20、所述的运动轨迹分析模块对目标轨迹信息进行运动轨迹分析处理,得到目标轨迹的分析结果;
21、所述的运动规律获取模块根据目标轨迹分析结果提取目标的运动规律;
22、所述的运动轨迹预判模块通过目标的轨迹的运动规律进行下一个时间点的目标预测,得到目标下一个轨迹点。
23、进一步地,所述的跟踪轨迹记录模块采用笔记本电脑或手机或二者同时作为踪轨迹记录模块。
24、本发明的有益效果是:由于设置有目标图像学习模块,在对于目标图像进行学习时,引入了机器深度学习技术,能够快速识别目标图像,在进行目标跟踪时,能够快速提高识别目标的切换,能够同时扑捉多个同类目标,提高了目标跟踪效果;由于设置有目标框创建模块,可根据不同的多种因素对于目标框进行创建,能够使目标框与目标物最为适配,提高目标跟踪效果;由于设置有跟踪轨迹预判模块,在进行目标轨迹跟踪时,可根据前段的轨迹跟踪结果,自动预判后续目标运动轨迹,能够快速得到目标的全程运动轨迹,大大提高整体轨迹跟踪效率。本发明能够实现依赖于深度学习的计算机视觉目标跟踪功能,解决解决光照不均匀、模板中外点较多与旋转变形等多种复杂条件下目标跟踪问题,具有自主学习、准确,抗干扰强等特点。
技术特征:
1.一种基于计算机视觉的目标跟踪系统,其特征在于包括:目标图像学习模块、目标框创建模块、目标自动获取模块、自动跟踪模块、跟踪轨迹预判模块、跟踪轨迹记录模块,其中,目标图像学习模块包括顺序连接的目标图像获取模块、图像特征提取模块、图像特征点标记模块、特征点连接模块和机器深度学习模块,输入可见光或者红外摄像头获取到的图像经目标图像学习模块,输出目标信息提取后的图像;目标框创建模块包括顺序连接的目标跟踪距离获取模块、目标移动速率获取模块、目标大小获取模块、目标框大小调节模块和目标框生成模块,目标图像学习模块输出的目标信息提取后的图像经目标框创建模块,输出带有符合目标大小的目标框的图像;目标自动获取模块包括顺序连接的跟踪目标空间转换模块、目标三维特征构建模块、三维目标特征值获取模块、滤波跟踪计算模块和目标框点相应模块,目标框创建模块输出的带有目标框的图像经目标自动获取模块,输出完成目标框选的图像;目标自动获取模块输出的图像经自动跟踪模块,输出实时动态跟踪效果图像;跟踪轨迹预判模块包括顺序连接的目标运动轨迹扑捉模块、运动轨迹点绘制模块、运动轨迹分析模块、运动规律获取模块和运动轨迹预判模块,自动跟踪模块输出的实时动态跟踪效果图像经跟踪轨迹预判模块,输出预判的目标位置信息;跟踪轨迹预判模块输出的预判目标位置信息至跟踪轨迹记录模块进行跟踪信息实时记录;
2.如权利要求1所述的一种基于计算机视觉的目标跟踪系统,其特征在于:所述的跟踪轨迹记录模块采用笔记本电脑或手机或二者同时作为踪轨迹记录模块。
技术总结
本发明提供了一种基于计算机视觉的目标跟踪系统。包括目标图像学习模块、目标框创建模块、目标自动获取模块、自动跟踪模块、跟踪轨迹预判模块、跟踪轨迹记录模块,能够实现依赖于深度学习的计算机视觉目标跟踪,解决解决光照不均匀、模板中外点较多与旋转变形等多种复杂条件下目标跟踪问题,具有自主学习、准确,抗干扰强等特点。
技术研发人员:郝健,冯晓辉,眭臻
受保护的技术使用者:西安长远电子工程有限责任公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!