人机共驾地图渲染方法、装置、电子设备和可读存储介质与流程
本发明涉及车辆驾驶的地图渲染,尤其是涉及一种人机共驾地图渲染方法、装置、电子设备和可读存储介质。
背景技术:
1、人机共驾(human machine co-pilot)是指车辆的控制执行机构,在满足一定的路况情况下,可以按照特定策略接管车辆,并辅助用户对车辆进行驾驶控制。该技术强依赖于高精地图数据,视觉摄像头和雷达传感器等技术。为了向用户展示车辆的控制执行机构接管车辆期间,车辆自动驾驶的策略和路径规划信息,需要将该信息在人机共驾地图上进行渲染,让用户可以直观感受到自动驾驶和/或辅助驾驶的策略。
2、当前一般基于视觉摄像头和激光雷达感知外界,将现实交互渲染于地图页面,能够对车环境,包含车道、路边物体、车道上的车辆和障碍物等进行感知和视觉渲染。
3、该方案在实现上比较简单,渲染内容丰富,仅依赖于视觉,不依赖高精地图。但是高清摄像头成本较高,且对车机的算力要求较高;当车速过快时,渲染效果模糊,且该基于视觉的方案容易受到天气的影响,导致(摄像头遮挡、道路积水或积雪时)无法渲染车道信息,甚至摄像头损坏导致无法渲染。
技术实现思路
1、本发明的目的在于提供一种人机共驾地图渲染方法、装置、电子设备和可读存储介质,以缓解成本和车机算力要求较高,且外设容易被遮挡无法准确渲染还原路况的技术问题。
2、第一方面,本发明实施例提供了一种人机共驾地图渲染方法,包括:
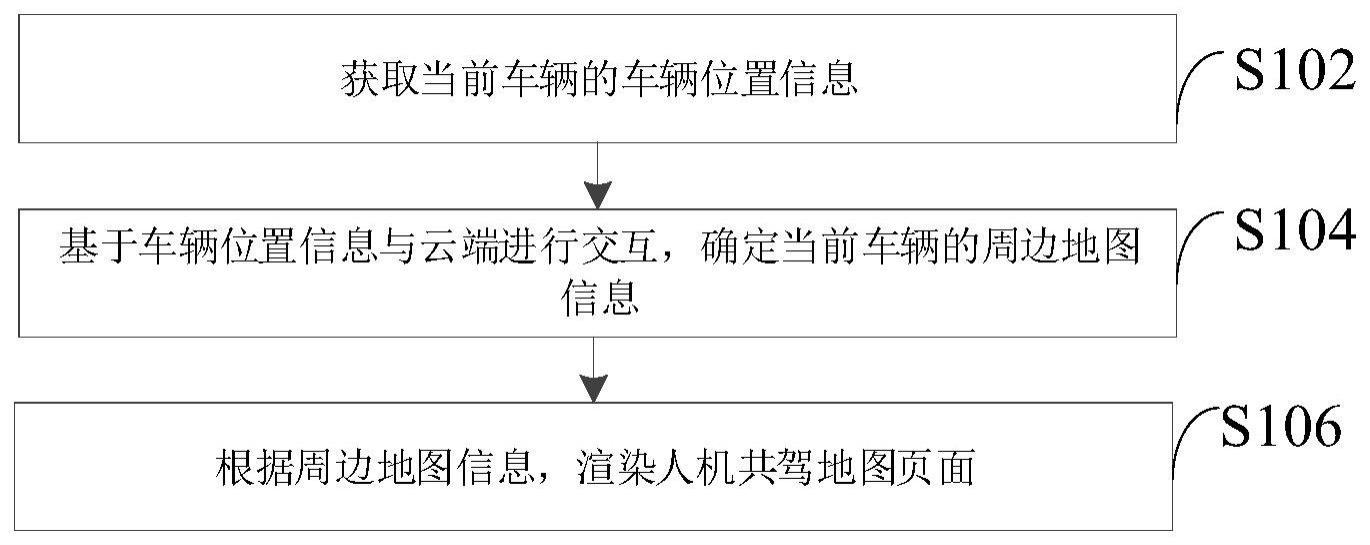
3、获取当前车辆的车辆位置信息,其中,所述车辆位置信息包括位置坐标,车辆3d模型标识,车辆行驶方向和车辆控制信号状态;
4、基于所述车辆位置信息与云端进行交互,确定所述当前车辆的周边地图信息;
5、根据所述周边地图信息,渲染人机共驾地图页面。
6、结合第一方面,本发明实施例提供了第一方面的第一种可能的实施方式,其中,基于所述车辆位置信息与云端进行交互,确定所述当前车辆的周边地图信息的步骤,包括:
7、基于目标触发条件将所述车辆位置信息上传云端,以使所述云端基于所述车辆位置信息确定所述当前车辆的周边地图信息;
8、接收所述云端下发的所述周边地图信息,其中,所述周边地图信息为所述当前车辆第一预设范围内的地图信息。
9、结合第一方面,本发明实施例提供了第一方面的第二种可能的实施方式,其中,基于目标触发条件将所述车辆位置信息上传云端,以使所述云端基于所述车辆位置信息确定所述当前车辆的周边地图信息的步骤,包括:
10、当处于实时触发条件或当前车辆的行驶路况满足预设要求,将所述车辆位置信息上传至云端,以使所述云端解析所述车辆3d模型标识,并根据所述位置坐标和所述车辆行驶方向,确定实时地图中的所述当前车辆以及所述当前车辆的周边地图信息。
11、结合第一方面,本发明实施例提供了第一方面的第三种可能的实施方式,其中,根据所述周边地图信息,渲染人机共驾地图页面的步骤,包括:
12、基于所述当前车辆的驾驶辅助系统,采集所述当前车辆的第二预设范围内的目标对象信息;
13、将所述周边地图信息与所述目标对象信息相结合,共同对人机共驾地图进行渲染。
14、结合第一方面,本发明实施例提供了第一方面的第四种可能的实施方式,其中,获取当前车辆的车辆位置信息的步骤之前,所述方法还包括:
15、将所述当前车辆的车载导航系统中的标准地图上传到服务器进行道路关联处理,确定精度级别符合预设要求的人机共驾地图。
16、结合第一方面,本发明实施例提供了第一方面的第五种可能的实施方式,其中,获取当前车辆的车辆位置信息的步骤,包括:
17、基于所述人机共驾地图、视觉摄像头和雷达传感器,确定所述当前车辆的车辆位置信息。
18、结合第一方面,本发明实施例提供了第一方面的第六种可能的实施方式,其中,所述云端用于实时接收任意智能设备上传的车辆位置信息和目标对象信息,并更新实时地图。
19、第二方面,本发明实施例还提供一种人机共驾地图渲染装置,包括:
20、获取模块,获取当前车辆的车辆位置信息,其中,所述车辆位置信息包括位置坐标,车辆3d模型标识,车辆行驶方向和车辆控制信号状态;
21、确定模块,基于所述车辆位置信息与云端进行交互,确定所述当前车辆的周边地图信息;
22、渲染模块,根据所述周边地图信息,渲染人机共驾地图页面。
23、第三方面,实施例提供一种电子设备,包括存储器、处理器,所述存储器中存储有可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述前述实施方式任一项所述的方法的步骤。
24、第四方面,实施例提供一种机器可读存储介质,所述机器可读存储介质存储有机器可执行指令,所述机器可执行指令在被处理器调用和执行时,机器可执行指令促使处理器实现前述实施方式任一项所述的方法的步骤。
25、本发明实施例带来了一种人机共驾地图渲染方法、装置、电子设备和可读存储介质,通过获取能够表征当前车辆的所在位置的车辆位置信息,并依据该车辆位置信息与云端进行交互,进而得到当前车辆的周边地图信息,再基于该周边地图信息渲染更新当前车辆的人机共驾地图,进而得到更加精准的自动驾驶或辅助驾驶的地图数据,保证用户的驾驶安全。
26、本发明的其他特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点在说明书以及附图中所特别指出的结构来实现和获得。
27、为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
技术特征:
1.一种人机共驾地图渲染方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,基于所述车辆位置信息与云端进行交互,确定所述当前车辆的周边地图信息的步骤,包括:
3.根据权利要求2所述的方法,其特征在于,基于目标触发条件将所述车辆位置信息上传云端,以使所述云端基于所述车辆位置信息确定所述当前车辆的周边地图信息的步骤,包括:
4.根据权利要求1所述的方法,其特征在于,根据所述周边地图信息,渲染人机共驾地图页面的步骤,包括:
5.根据权利要求1所述的方法,其特征在于,获取当前车辆的车辆位置信息的步骤之前,所述方法还包括:
6.根据权利要求1所述的方法,其特征在于,获取当前车辆的车辆位置信息的步骤,包括:
7.根据权利要求1-6中任一项所述的方法,其特征在于,所述云端用于实时接收任意智能设备上传的车辆位置信息和目标对象信息,并更新实时地图。
8.一种人机共驾地图渲染装置,其特征在于,包括:
9.一种电子设备,其特征在于,包括存储器、处理器及存储在所述存储器上并且能够在所述处理器上运行的程序,所述处理器执行所述程序时实现如权利要求1至7中任一项所述的方法。
10.一种计算机可读存储介质,其特征在于,所述可读存储介质中存储有计算机程序,所述计算机程序被执行时实现权利要求1-7中任意一项所述的方法。
技术总结
本发明提供了一种人机共驾地图渲染方法、装置、电子设备和可读存储介质,涉及车辆驾驶的地图渲染技术领域,包括:获取当前车辆的车辆位置信息,其中,车辆位置信息包括位置坐标,车辆3D模型标识,车辆行驶方向和车辆控制信号状态;基于车辆位置信息与云端进行交互,确定当前车辆的周边地图信息;根据周边地图信息,渲染人机共驾地图页面,以缓解成本和车机算力要求较高,且外设容易被遮挡无法准确渲染还原路况的技术问题。
技术研发人员:骆俊凯,李洁辰
受保护的技术使用者:上海洛轲智能科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!