一种雾天环境下的车道线检测方法与流程
本发明属于无人驾驶的车道线检测,更具体地,本发明涉及一种雾天环境下的车道线检测方法。
背景技术:
1、车道线检测是无人驾驶技术重要组成部分,其核心问题在于如何快速准确地检测出车道线。在雾天的驾驶环境下,车道线图像受到大气中雾气的影响会出现散射,导致图像中车道线部分不清晰,车道线的一些边缘特征会被雾气所掩盖,这会使后续的车道线检测精度下降。传统去雾方法大都基于物理模型进行去雾,利用各种先验或方法去获取大气散射模型中的透射率和大气光值。大气散射模型的公式如下:i(x)=j(x)t(x)+a∞(1-t(x))
2、其中i(x)代表获得的有雾图像,a∞代表大气光系数,x为像素的坐标,t(x)代表大气透射率,j(x)t(x)代表观测器接收到的无散射的部分,a∞(1-t(x))为散射的部分。
3、要实现去雾,即需要通过有雾的i(x)恢复出无雾图像j(x),而当大气均匀时t(x)为:
4、t(x)=e-βd(x)
5、其中β为大气散射系数,d(x)为物体与观测器的距离。通过将t(x)代入大气散射模型中即可得到无雾图像j(x)。
6、
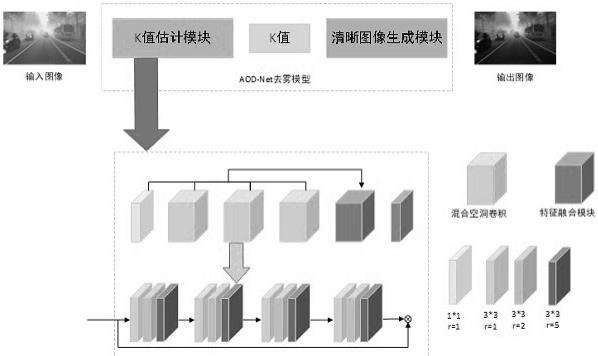
7、由于是对无人驾驶的图像进行去雾,需要考虑其实时性,所以选择aod-net进行改进。aod-net是一个基于深度学习的轻量级去雾网络,该算法同样依靠大气去雾模型,但不同的是aod-net通过将大气透射率t(x)与大气光值a融合为一个k(x),经过整合后,无雾输出和k(x)如下:
8、j(x)=k(x)i(x)-k(x)+b
9、
10、aod-net通过整合大气光照值和大气透射率,使得有雾图像与无雾图像的转换关系变得更加简单,也使得误差减小,现在只需得知k(x)的值便可以生成清晰图像。aod-net的中心思想即通过建立一个自适应深度模型,对输入的有雾图片,采用卷积神经网络进行k值估计,在获得k值后,即可通过清晰图像生成模块按照转换后的公式生成新的无雾图片。aod-net的模型结构如图一所示。
技术实现思路
1、本发明针对雾天场景下车道线图像被雾气所遮掩、图像整体呈灰白色导致车道线检测漏检率和误检率较高的问题提供一种雾天环境下的车道线检测方法。
2、本发明提供一种雾天环境下的车道线检测方法,所述雾天环境下的车道线检测方法包括以下步骤:
3、步骤一:将aod-net的l2损失函数替换为ssim损失函数;
4、步骤二:在aod-net的k(x)估计模块中引入混合空洞卷积,以此提升神经网络的感受野,获得大尺度特征;
5、步骤三:在aod-net的k(x)估计模块中引入特征融合模块,以此得到不同层次特征的权重;
6、步骤四:在aod-net的清晰图像生成模块后嵌入zero-dce网络,以此改进aod-net在低照度情况时算法表现不佳,甚至导致图像清晰度与明亮度进一步降低的问题;
7、步骤五:使用culane数据集训练改进的erfnet检测网络,再用通过上述改进的aod-net网络增强后的车道线图像继续训练改进的erfnet网络。通过测试得到车道线检测结果。
8、对于步骤一:由于l2损失函数评判的图像质量没有很好的考虑到人类视觉感知,该损失函数无纹理区域的颜色变化和亮度很敏感,可能会在去雾图像上生成一些斑点或瑕疵。因此使用ssim作为损失函数。ssim损失函数的定义如下:
9、
10、
11、x代表预测值,y代表实际值,n代表区域内的像素数量,p代表像素的索引。μx表示x的平均值、是x的方差、σxy代表x和y协方差。μx和σx可以视为x的亮度和对比度的估值,通过x和y的变化趋势,得以对其结构相似性进行分析。
12、对于步骤二:为获得较大的感受野,常用的方法有池化操作和增大卷积核的尺寸。但是,这两种方法在扩大感受野的同时也带来新的问题。其中,池化操作降低特征图的分辨率;增大卷积核的尺寸带来更多的参数,导致计算量增加。而空洞卷积可以在不损失分辨率和不增加计算量的前提下,扩大感受野。混合空洞卷积使用一组不同空洞率的空洞卷积构成一个卷积组合。它的优点在于可以扩大感受野,以获得全局信息,同时,减轻棋盘效应。
13、对于步骤三:随着卷积层数的增加,提取到的特征越来越高级,融合不同层次的特征对于计算机视觉任务是有利的。而且对各种层次特征进行融合,可以将低层次的特征送到网络深层。为利用好不同层次的特征,本发明设计一个特征融合模块。
14、对于步骤四:zero-dce是用于低照度增强的零参考深度估计曲线,算法采用轻量级dce-net对像素和高阶曲线进行估计,并通过估计值来确定图像的动态范围调整。同时对曲线估计做出了一定改进,能够更好的保留相邻像素的对比度,相比于其他算法,zero-dce更多地关注了像素范围、单调性、可微性,并以此实现了更好的像素级动态调整,该算法在较好地保持图片原本色彩的同时也减少了过度曝光的情况。
15、对于步骤五:对于改进的erfnet车道线检测网络,引入自注意蒸馏,使用编码层后层的注意力图蒸馏前层注意力图,使前层注意力图可以学习到后层注意力图的上下文信息,以此提升网络对车道线的检测精度。将erfnet网络的编码层扩展为4层,可以提取更深层次的特征。综上所述,本发明的优点及积极效果为:本发明针对车道线检测算法在雾天环境下检测准确率下降、误检率升高的现象,提出基于改进aod-net的雾天车道线检测方法,解决了雾天车道线图像受雾气遮掩、对比度不高、车道线检测精度差的问题,为雾天无人驾驶技术提供了保障。
技术特征:
1.一种雾天环境下的车道线检测方法,其特征在于:所述检测方法包括以下步骤:
2.如权利要求1所述的一种雾天环境下的车道线检测方法,其特征在于:所述步骤一中使用ssim 作为损失函数。
3.如权利要求1所述的一种雾天环境下的车道线检测方法,其特征在于:所述步骤二中混合空洞卷积使用一组不同空洞率的空洞卷积构成一个卷积组合。
4.如权利要求1所述的一种雾天环境下的车道线检测方法,其特征在于:所述步骤三中对各种层次特征进行融合,将低层次的特征送到网络深层,为利用好不同层次的特征,使用特征融合模块。
5.如权利要求1所述的一种雾天环境下的车道线检测方法,其特征在于:所述步骤四中zero-dce 是用于低照度增强的零参考深度估计曲线,算法采用轻量级dce-net 对像素和高阶曲线进行估计,并通过估计值来确定图像的动态范围调整。
6.如权利要求1所述的一种雾天环境下的车道线检测方法,其特征在于:所述步骤五中对于改进的erfnet车道线检测网络,引入自注意蒸馏,使用编码层后层的注意力图蒸馏前层注意力图,使前层注意力图学习到后层注意力图的上下文信息,以此提升网络对车道线的检测精度。
技术总结
本发明针对雾天场景下车道线图像被雾气所遮掩、图像整体呈灰白色导致车道线检测漏检率和误检率较高的问题提供一种雾天环境下的车道线检测方法。解决了雾天车道线图像受雾气遮掩、对比度不高、车道线检测精度差的问题,为雾天无人驾驶技术提供了保障。
技术研发人员:张奇峰,汪洋,陈彦斌,王旗军,葛愿
受保护的技术使用者:国网安徽省电力有限公司芜湖供电公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!