一种车位与车辆状态监控方法与流程
本发明应用于视频监控与停车管理领域,具体是一种车位与车辆状态监控方法。
背景技术:
1、停车管理系统大量应用在商场,公园,园区,大型娱乐设施中的停车场等场景,在智慧园区、数字乡镇等领域也得到广泛应用,帮助管理与监控车位占用情况。完整的车位占用监控系统包括:摄像装置和车位占用状态检测装置在内的其他终端,摄像装置采集到的车位和车辆图像与部署在车位上的车位占用检测装置的信息在终端合并分析车位占用情况与当前被占用车位上的车辆信息(车牌),再对这些信息进行管理与应用,例如统计停车场的流量等。由于摄像头部署的角度无法正对所有车位和车辆,传统的垂直矩形检测框难以对齐视频数据中的车位与车辆的边缘,检测框内框入更多的无用背景,影响了车位是否被占用的判断精度,因此在每个车位上部署车位占用检测的物理装置成了提高对车位占用判断的准确度的有效方法之一,却大大提高了装置成本与后续维护成本。除了安装物理装置这一提高判断车位占用的精度手段外,使用标定的方式来减少摄像头视角的偏移或广角镜头造成的畸变也是常用方法之一,但是以上两种方式的维护成本与后期模块升级复杂程度都较高。
技术实现思路
1、本发明所要解决的技术问题是针对现有技术的不足,提供一种车位与车辆状态监控方法。
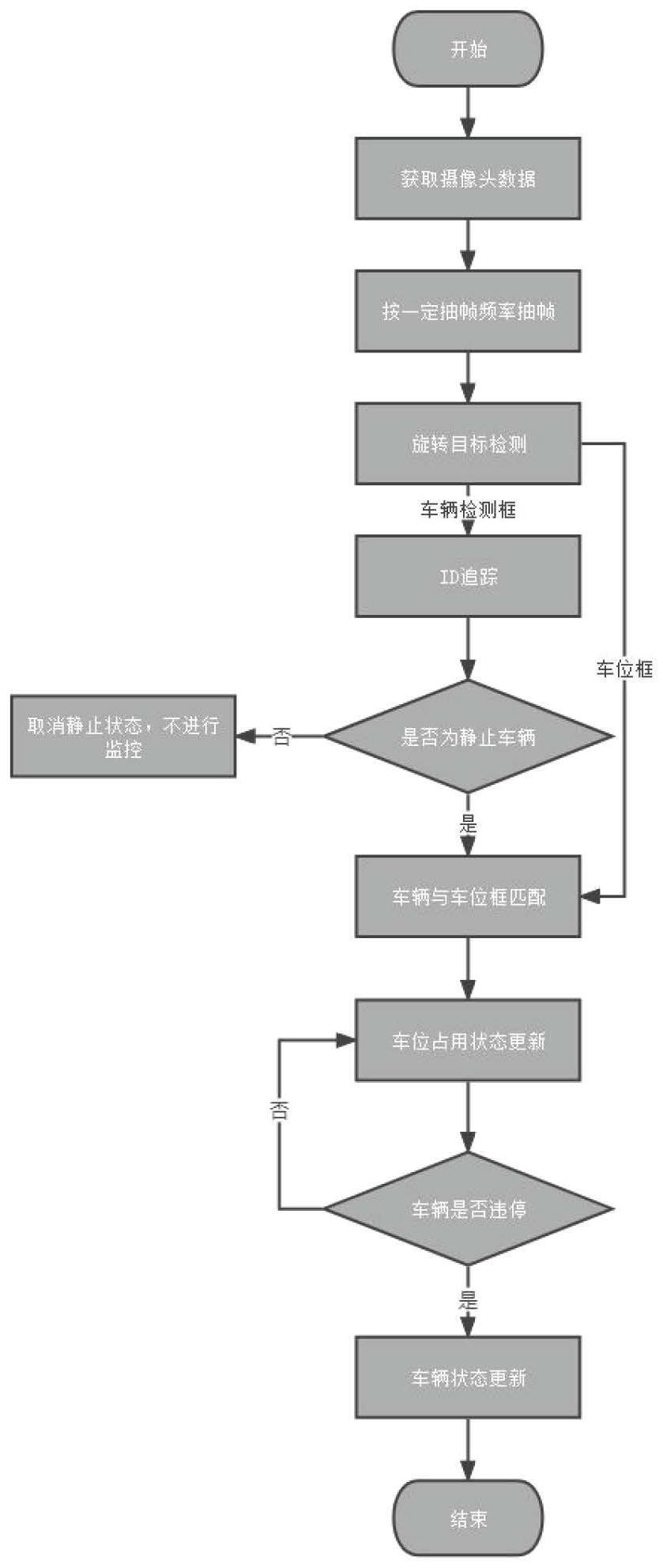
2、为解决上述技术问题,本发明的一种车位与车辆状态监控方法,具体包括如下步骤:
3、对视频流进行抽帧获取待检测图;
4、构建并训练旋转目标检测模型;
5、利用旋转目标检测模型对车位及车辆进行识别输出车辆检测框与车位检测框;
6、利用目标追踪算法判断连续待检测图中的车辆检测框为静止或移动;
7、对静止的车辆检测框与车位检测框进行相关度计算并输出车位及静止车辆状态。
8、作为一种可能的实施方式,进一步的,所述构建并训练旋转目标检测模型步骤具体包括:
9、构建旋转目标检测模型,其包括:
10、backbone,panet结构加上特征金字塔结构;
11、主干网络,采用dark53net;
12、prediction层,采用解耦头层用于预测框的前后景类别、检测类别和框的具体信息
13、训练旋转目标检测模型,具体为:将停车场的2d图像数据以及对应车位与车辆在该2d图像数据中的检测框信息作为训练数据输入构建好的旋转目标检测模型对其进行训练。
14、作为一种可能的实施方式,进一步的,所述构建并训练旋转目标检测模型步骤还包括:
15、设计训练旋转目标检测模型的损失函数,具体如下:
16、
17、其中,μp,μgt为检测框与真实框,其中第一项针对检测框di={x,y,w,h,θ}整体进行耦合损失计算;与两项针对检测框di中的w,h,θ进行了耦合损失计算,整体形成链式耦合关系。
18、作为一种可能的实施方式,进一步的,所述利用旋转目标检测模型对车位及车辆进行识别输出车辆检测框与车位检测框步骤具体包括:
19、获取2d图像数据对其进行数据增强的前处理后输入旋转目标检测模型;
20、增强后的2d数据进入backbone中提取特征金字塔的信息数据,为多个anchor尺寸下的特征信息图变换;
21、多个anchor尺寸下的特征信息图传入prediction解耦头层进行预测框的前后景类别、检测类别和框的具体信息;
22、多个anchor尺寸下的所有预测框再传入分类非最大抑制至计算层筛选多个anchor尺寸下最为准确的检测框。
23、作为一种可能的实施方式,进一步的,所述利用目标追踪算法判断连续待检测图中的车辆检测框为静止或移动步骤具体为:
24、使用目标追踪方法对连续待检测图中的所有检测框进行跟踪,相同车辆检测框在连续帧中被赋予相同的标签;
25、设定连续待检测图中被赋予相同标签的车辆检测框集合为det={di,i=1,2,3,......},di为旋转目标检测模型输出的车辆检测框,取di中心点c=(x,y),分别统计车辆检测框集合det中所有中心点的x坐标方差、y坐标方差;
26、当中心点集x坐标方差或y坐标方差大于阈值γ1时判定为移动车辆检测框,小于阈值γ2时判定为静止车辆检测框,计算公式如下:
27、
28、作为一种可能的实施方式,进一步的,所述对静止的车辆检测框与车位检测框进行相关度计算并输出车位及静止车辆状态步骤具体为:
29、利用kl散度函数对车辆检测框与车位检测框的相关度与偏离值进行计算,kl散度值越低说明检测车辆框与检测车位框的匹配程度越高;
30、对车辆检测框与车位检测框进行分配绑定,计算公式如下:
31、
32、当车辆检测框di与车位检测框dj的dkl散度小于阈值γ时,将车辆检测框di与车位检测框dj进行分配绑定,其中车位占用状态0表示空闲,1表示被占用;车辆状态0表示正确停车,1表示违停。
33、本发明采用以上技术方案,具有以下有益效果:
34、旋转目标检测算法预测的检测框大大减少了视角偏移的车位框和车辆检测框不匹配的问题,使得本方案在有广角镜头畸变的视频数据上的车位占用检测精度更高,减少车位的误分配。仅使用摄像头获取视频数据,并在车辆目标检测中使用旋转矩形检测框或四边形检测框等形状更加自由和较容易贴合车位车辆的检测框提高对车位占用判断的精度,是一种较低成本的仅使用摄像装置支持低算力id追踪的数据抽取方式监控车位占用与车辆违停行为的停车监控方法。
技术特征:
1.一种车位与车辆状态监控方法,其特征在于,具体包括如下步骤:
2.根据权利要求1所述的一种车位与车辆状态监控方法,其特征在于:所述构建并训练旋转目标检测模型步骤具体包括:
3.根据权利要求2所述的一种车位与车辆状态监控方法,其特征在于:所述构建并训练旋转目标检测模型步骤还包括:
4.根据权利要求1所述的一种车位与车辆状态监控方法,其特征在于:所述利用旋转目标检测模型对车位及车辆进行识别输出车辆检测框与车位检测框步骤具体包括:
5.根据权利要求1所述的一种车位与车辆状态监控方法,其特征在于:所述利用目标追踪算法判断连续待检测图中的车辆检测框为静止或移动步骤具体为:
6.根据权利要求1所述的一种车位与车辆状态监控方法,其特征在于:所述对静止的车辆检测框与车位检测框进行相关度计算并输出车位及静止车辆状态步骤具体为:
技术总结
本发明公开一种车位与车辆状态监控方法,具体包括如下步骤:对视频流进行抽帧获取待检测图;构建并训练旋转目标检测模型;利用旋转目标检测模型对车位及车辆进行识别输出车辆检测框与车位检测框;利用目标追踪算法判断连续待检测图中的车辆检测框为静止或移动;对静止的车辆检测框与车位检测框进行相关度计算并输出车位及静止车辆状态。仅使用摄像头获取视频数据,并在车辆目标检测中使用旋转矩形检测框或四边形检测框等形状更加自由和较容易贴合车位车辆的检测框提高对车位占用判断的精度。
技术研发人员:林宇恒,王欢,林林
受保护的技术使用者:新大陆数字技术股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!