仿真模型构建方法、装置、设备及计算机存储介质与流程
本申请属于数据处理领域,尤其涉及一种仿真模型构建方法、装置、设备及计算机存储介质。
背景技术:
1、通常情况下,无人驾驶设备在开发时,为了节约成本,会在虚拟环境中对无人驾驶设备搭载的模型或算法进行仿真测试,从而发现并解决无人驾驶设备存在的问题。其中,车辆动力学模型是否可以对车辆在接收到控制指令后的速度、加速度等参数的变化,对无人驾驶设备的仿真是否能够成功实现起到了十分关键的作用。
2、现有技术中,往往通过多自由度动力学模型构建车辆动力学模型。而为了更准确的模拟车辆的运行状态,这类车辆动力学模型的自由度逐渐增加。但是,由于自由度的增加,这类模型需要进行确定的模型参数也逐渐增多,构建难度增加。
3、可见,在构建车辆动力学模型的过程中,往往难以兼顾车辆动力学模型的准确性以及构建难度。
技术实现思路
1、本申请实施例提供一种仿真模型构建方法、装置、设备及计算机存储介质,能够更准确的模拟车辆在实际行驶中接收到控制指令后的车辆状态,提高车辆仿真结果的准确性,且构建难度低,提高了构建仿真模型的效率。
2、一方面,本申请实施例提供一种仿真模型构建方法,方法包括:
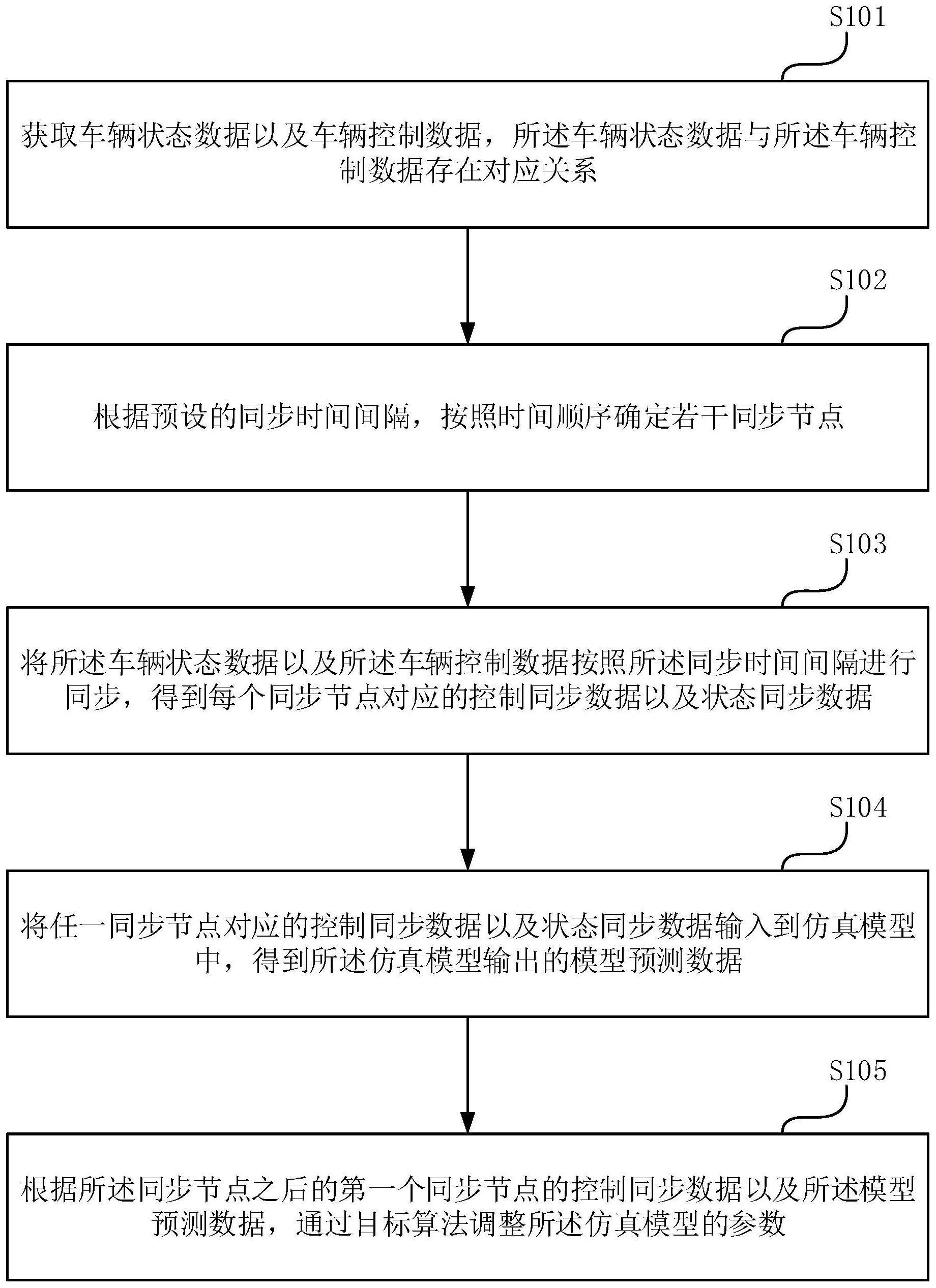
3、获取车辆状态数据以及车辆控制数据,所述车辆状态数据与所述车辆控制数据存在对应关系;
4、根据预设的同步时间间隔,按照时间顺序确定若干同步节点;
5、将所述车辆状态数据以及所述车辆控制数据按照所述同步时间间隔进行同步,得到每个同步节点对应的控制同步数据以及状态同步数据;
6、将任一同步节点对应的控制同步数据以及状态同步数据输入到仿真模型中,得到所述仿真模型输出的模型预测数据;
7、根据所述同步节点之后的第一个同步节点的控制同步数据以及所述模型预测数据,通过目标算法调整所述仿真模型的参数。
8、可选的,根据所述同步节点之后的第一个同步节点的控制同步数据以及所述模型预测数据,通过目标算法调整所述仿真模型的参数之后,所述方法还包括:
9、分别确定无人驾驶设备按照所述同步节点之后的第一个同步节点的控制同步数据行驶的第一行驶轨迹,以及所述无人驾驶设备按照所述模型预测数据行驶的第二行驶轨迹;
10、当确定所述第一行驶轨迹与所述第二行驶轨迹的差距大于预设的误差阈值时,返回所述将任一同步节点对应的控制同步数据以及状态同步数据输入到仿真模型中,得到所述仿真模型输出的模型预测数据,直至第一行驶轨迹与第二行驶轨迹的差距小于或等于该误差阈值为止;
11、当确定所述第一行驶轨迹与所述第二行驶轨迹的差距小于或等于该误差阈值时,完成所述仿真模型的构建。
12、可选的,将所述车辆状态数据以及所述车辆控制数据按照所述同步时间间隔进行同步,得到每个同步节点对应的控制同步数据以及状态同步数据之前,所述方法还包括:
13、对所述同步节点对应的控制同步数据以及状态同步数据进行平滑滤波处理。
14、可选的,将任一同步节点对应的控制同步数据以及状态同步数据输入到仿真模型中,得到所述仿真模型输出的模型预测数据,具体包括:
15、将任一同步节点对应的状态同步数据作为隐层输入,输入到仿真模型的隐层中;
16、将所述同步节点对应的控制同步数据作为模型输入,输入到所述仿真模型中;
17、得到所述仿真模型输出的模型预测数据。
18、可选的,将所述同步节点对应的控制同步数据作为模型输入,输入到所述仿真模型中,具体包括:
19、按照所述时间顺序,根据所述同步节点对应的时间戳,确定与所述同步节点时间间隔小于预设的间隔阈值的若干同步节点;
20、将所述若干同步节点中每个同步节点对应的状态同步数据均作为模型输入,输入到所述仿真模型中。
21、可选的,根据所述同步节点之后的第一个同步节点的控制同步数据以及所述模型预测数据,通过目标算法调整所述仿真模型的参数之后,所述方法还包括:
22、实时获取车辆在第一时刻的实时行驶数据、实时状态数据以及目标时间段内的真实行驶轨迹,所述目标时间段在所述第一时刻之后;
23、将所述实时行驶数据以及所述实时状态数据输入至所述仿真模型中,获取所述仿真模型输出的模型预测数据;
24、基于所述模拟预测数据,确定模拟行驶轨迹;
25、当确定所述真实行驶轨迹与所述模拟行驶轨迹的误差大于预设的误差阈值时,返回所述获取车辆状态数据以及车辆控制数据,所述车辆状态数据与所述车辆控制数据存在对应关系,其中,所述车辆状态数据以及所述车辆控制数据为所述车辆在行驶过程中的数据。
26、另一方面,本申请实施例提供了一种仿真模型构建装置,装置包括:
27、获取单元,用于获取车辆状态数据以及车辆控制数据,所述车辆状态数据与所述车辆控制数据存在对应关系;
28、确定单元,用于根据预设的同步时间间隔,按照时间顺序确定若干同步节点;
29、同步单元,用于将所述车辆状态数据以及所述车辆控制数据按照所述同步时间间隔进行同步,得到每个同步节点对应的控制同步数据以及状态同步数据;
30、输入单元,用于将任一同步节点对应的控制同步数据以及状态同步数据输入到仿真模型中,得到所述仿真模型输出的模型预测数据;
31、构建单元,用于根据所述同步节点之后的第一个同步节点的控制同步数据以及所述模型预测数据,通过目标算法调整所述仿真模型的参数。
32、再一方面,本申请实施例提供了一种仿真模型构建设备,设备包括:
33、处理器以及存储有计算机程序指令的存储器;
34、所述处理器执行所述计算机程序指令时实现如上述一方面所述的仿真模型构建方法。
35、再一方面,本申请实施例提供了一种计算机存储介质,所述计算机可读存储介质上存储有计算机程序指令,所述计算机程序指令被处理器执行时实现如上述一方面的任意一项所述的仿真模型构建方法。
36、再一方面,本申请实施例提供了一种计算机程序产品,所述计算机程序产品中的指令由电子设备的处理器执行时,使得所述电子设备实现如上述一方面的任意一项所述的仿真模型构建方法。
37、本申请实施例的仿真模型构建方法、装置、设备及计算机存储介质,能够构建仿真模型。该仿真模型是将某一时刻的车辆控制数据以及车辆状态数据作为输入,得到仿真模型输出的模型预测数据。再将该时刻之后的车辆行驶轨迹与该模型预测数据进行对比,通过目标算法确定出的仿真模型。可见,该仿真模型可更准确的模拟车辆在实际行驶中接收到控制指令后的车辆状态,提高车辆仿真结果的准确性,并且,该仿真模型在构建过程中仅需要车辆行驶过程中的数据,无需对车辆每个零件的运动状态进行分析,构建难度较低,效率较高。
技术特征:
1.一种仿真模型构建方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,根据所述同步节点之后的第一个同步节点的控制同步数据以及所述模型预测数据,通过目标算法调整所述仿真模型的参数之后,所述方法还包括:
3.根据权利要求1所述的方法,其特征在于,将所述车辆状态数据以及所述车辆控制数据按照所述同步时间间隔进行同步,得到每个同步节点对应的控制同步数据以及状态同步数据之前,所述方法还包括:
4.根据权利要求1所述的方法,其特征在于,将任一同步节点对应的控制同步数据以及状态同步数据输入到仿真模型中,得到所述仿真模型输出的模型预测数据,具体包括:
5.根据权利要求4所述的方法,其特征在于,将所述同步节点对应的控制同步数据作为模型输入,输入到所述仿真模型中,具体包括:
6.根据权利要求1所述的方法,其特征在于,根据所述同步节点之后的第一个同步节点的控制同步数据以及所述模型预测数据,通过目标算法调整所述仿真模型的参数之后,所述方法还包括:
7.一种仿真模型构建装置,其特征在于,所述装置包括:
8.一种仿真模型构建设备,其特征在于,所述设备包括:处理器以及存储有计算机程序指令的存储器;
9.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序指令,所述计算机程序指令被处理器执行时实现如权利要求1-6任意一项所述的仿真模型构建方法。
10.一种计算机程序产品,其特征在于,所述计算机程序产品中的指令由电子设备的处理器执行时,使得所述电子设备执行如权利要求1-6任意一项所述的仿真模型构建方法。
技术总结
本申请公开了一种仿真模型构建方法、装置、设备及计算机存储介质。可将存在对应关系的车辆状态数据以及车辆控制数据按照预设的同步时间间隔进行同步,得到每个同步节点对应的控制同步数据以及状态同步数据。再将任一同步节点对应的控制同步数据以及状态同步数据输入到仿真模型中,基于得到的模型预测数据,以及该同步节点之后的第一个同步节点的控制同步数据,通过目标算法调整所述仿真模型的参数。根据本申请实施例,能够构建仿真模型。该仿真模型是基于车辆控制数据以及车辆状态数据,通过目标算法确定出的。可见,该仿真模型可更准确的模拟车辆在实际行驶中接收到控制指令后的车辆状态,提高车辆仿真结果的准确性,且构建难度较低。
技术研发人员:高翰炜,彭思敏,于乾坤
受保护的技术使用者:赛可智能科技(上海)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!