透明物体三维重建的装置和系统的制作方法
本技术涉及三维重建领域,尤其涉及透明物体三维重建的装置及系统。
背景技术:
1、在常规三维(3d)重建技术中,3d物体通过激光扫描其表面、从表面收集反射点并计算这些点的位置来进行重建。3d模型能够根据位置已知的点进行构建。然而,透明物体的重建由于其内部激光传输的各种复杂情况而颇具挑战。
技术实现思路
1、根据本实用新型的各个实施例,提供了用于透明物体三维重建的装置和系统。
2、根据本实用新型的第一方面,提供一种透明物体三维重建的装置,该装置包括:
3、第一相机,通过第一相机获取到反射点,所述反射点包括第一反射点和第二反射点;
4、第二相机;
5、处理器;及
6、连接到处理器并在其上存储用于使处理器执行以下操作的指令的非暂态计算机可读介质:
7、所述处理器用于当通过第一相机获取到反射点时,所述反射点包括第一反射点和第二反射点,所述第一反射点比所述第二反射点更靠近激光在振镜上的反射点,去除所述第二反射点;
8、所述处理器还用于当通过第二相机没有获取到所述第一反射点时,去除所述第一反射点;及
9、所述处理器还用于当通过第二相机获取到第二反射点时,找回所述第二反射点。
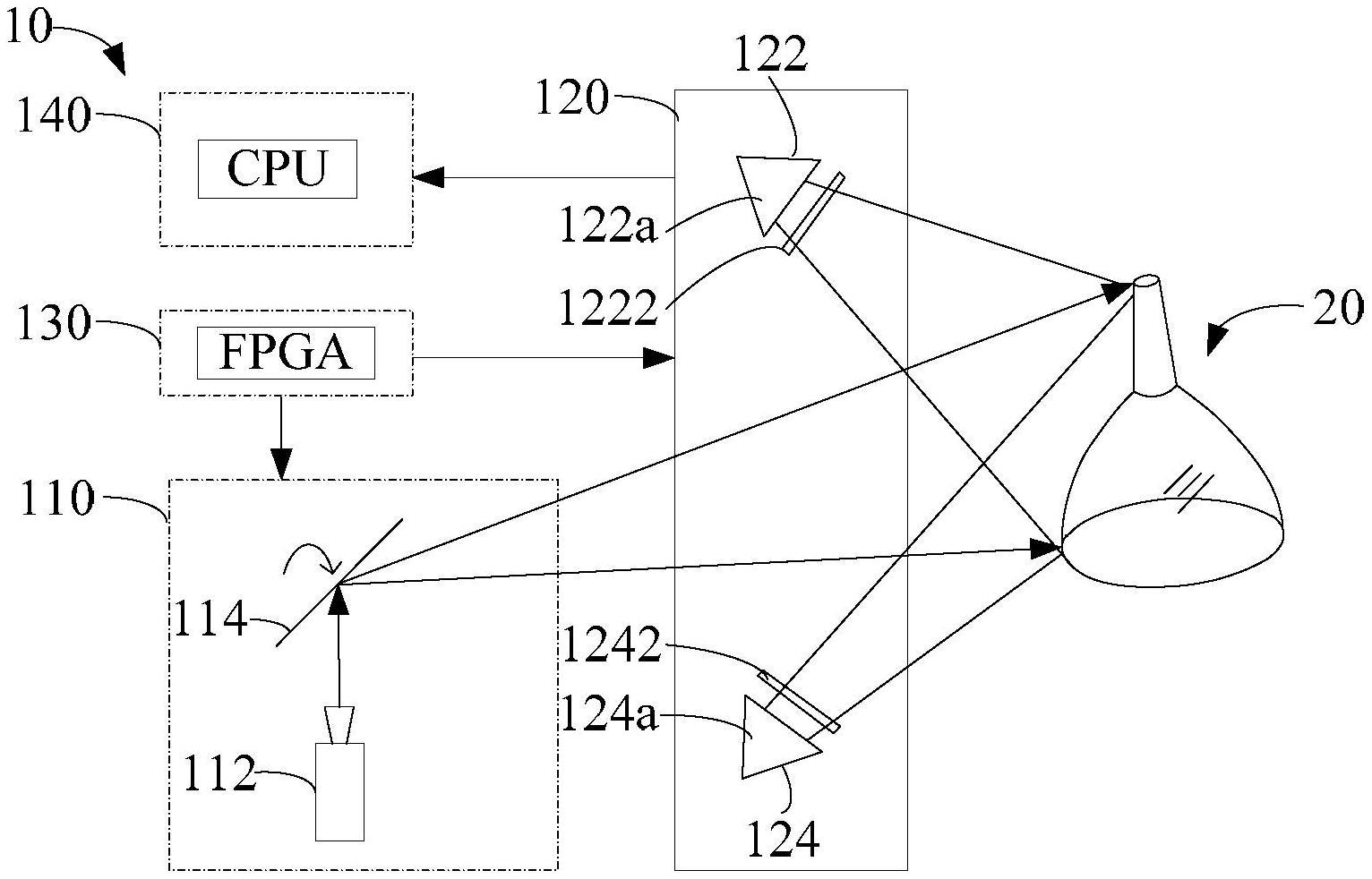
10、根据本实用新型的第二方面,提供一种透明物体三维重建的系统,包括:
11、结构光生成模块,其向物体发射激光,并允许激光扫描所述物体的被测表面;
12、图像采集模块,其包括第一相机和第二相机,所述第一相机和所述第二相机通过捕获从所述物体反射的激光来收集反馈图像对;
13、控制模块,其负责同步所述结构光生成模块和所述图像采集模块;及
14、计算模块,其从所述图像采集模块采集所述图像对;根据所述图像对来计算点的三维位置;并进行细化处理以提取前反射点;
15、其中,所述细化处理包括:
16、当通过所述第一相机获取到反射点时,所述反射点包括第一反射点和第二反射点,所述第一反射点比所述第二反射点更靠近激光在振镜上的反射点,去除第二反射点;
17、当通过所述第二相机没有获取到所述第一反射点时,去除所述第一反射点;及
18、当通过所述第二相机获取到第二反射点时,找回所述第二反射点。
19、此外,根据本实用新型的第三方面,还提供了利用所述装置和系统进行透明物体三维重建的方法,该方法包括:
20、当通过第一相机获取到反射点时,所述反射点包括第一反射点和第二反射点,所述第一反射点比所述第二反射点更靠近激光在振镜上的反射点,去除所述第二反射点;
21、当通过第二相机没有获取到所述第一反射点时,去除所述第一反射点;及
22、当通过第二相机获取到第二反射点时,找回所述第二反射点。
23、本实用新型的一个或多个实施例的细节将在以下描述和附图中给出。本实用新型的其他特征、目的和优点将从描述、附图和权利要求中变得显而易见。
技术特征:
1.一种透明物体三维重建的装置,其特征在于:包括:
2.根据权利要求1所述的装置,其特征在于:所述非暂态计算机可读介质在其上存储用于使所述处理器执行以下操作的指令:
3.根据权利要求1所述的装置,其特征在于:所述非暂态计算机可读介质在其上存储用于使所述处理器执行以下操作的指令:
4.一种透明物体三维重建的系统,其特征在于:包括:
5.根据权利要求4所述的系统,其特征在于:所述计算模块通过在激光移动时利用采集到的点形成虚拟轮廓;当形成离散的外部虚拟轮廓时,所述计算模块去除所述离散的外部虚拟轮廓。
6.根据权利要求5所述的系统,其特征在于:在所述计算模块去除所述离散的外部虚拟轮廓过程中,当所述点在预设搜索范围内的相邻点少于预设数量时,所述计算模块去除该点。
7.根据权利要求5所述的系统,其特征在于:所述结构光生成模块包括激光光源和振镜;所述激光光源将激光发射到所述振镜上,所述振镜将所述激光反射到物体上。
8.根据权利要求7所述的系统,其特征在于:所述振镜具有单轴旋转能力,所述激光通过将所述振镜旋转到连续的预设角度来扫描被测表面。
9.根据权利要求7所述的系统,其特征在于:所述激光的形状是点状、线状或曲线状。
10.根据权利要求4所述的系统,其特征在于:所述第一相机包括第一图像传感器、第一光学透镜和第一滤光片,所述第一光学透镜位于所述第一图像传感器和所述第一滤光片之间;
11.根据权利要求4所述的系统,其特征在于:所述控制模块负责通过脉冲调制使所述结构光生成模块与所述图像采集模块同步。
技术总结
本技术涉及透明物体三维重建的装置和系统。该系统包括结构光生成模块、图像采集模块、控制模块和计算模块。所述计算模块从图像获取模块采集图像对;根据图像对计算点的三维位置;并执行细化处理以提取出前反射点。所述细化处理包括:当通过第一相机获取到反射点时,所述反射点包括第一反射点和第二反射点,所述第一反射点比第二反射点更靠近激光在振镜上的反射点,去除所述第二反射点;当通过第二相机没有获取到所述第一反射点时,去除所述第一反射点;当通过第二相机获取到第二反射点时,找回第二反射点,且当形成离散的外部虚拟轮廓时,去除离散的外部虚拟轮廓。
技术研发人员:刘云辉,何珂晶,隋聪颖
受保护的技术使用者:香港物流机械人研究中心有限公司
技术研发日:20221020
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!