识别装置、识别方法以及程序与流程
本技术涉及识别对象物的识别所涉及的识别装置、识别方法以及程序。
背景技术:
1、在专利文献1中记载了针对使虚拟对象与相机图像重叠的增强现实图像,向用户提供用户正将手伸向虚拟对象的图像。
2、现有技术文献
3、专利文献
4、专利文献1:日本特开2020-064592号公报
技术实现思路
1、发明所要解决的技术问题
2、例如,在针对使虚拟对象重叠后的增强现实图像生成用户正将手伸向虚拟对象的图像的情况下,若手的识别精度低,则有时会成为不自然的增强现实图像,如虚拟对象在手之上重叠而变得无法观察到手等情况。
3、鉴于上述情况,本技术的目的在于提供能够提高识别对象物的识别精度的识别装置、识别方法以及程序。
4、用于解决技术问题的技术方案
5、本技术涉及的识别装置具备处理部。
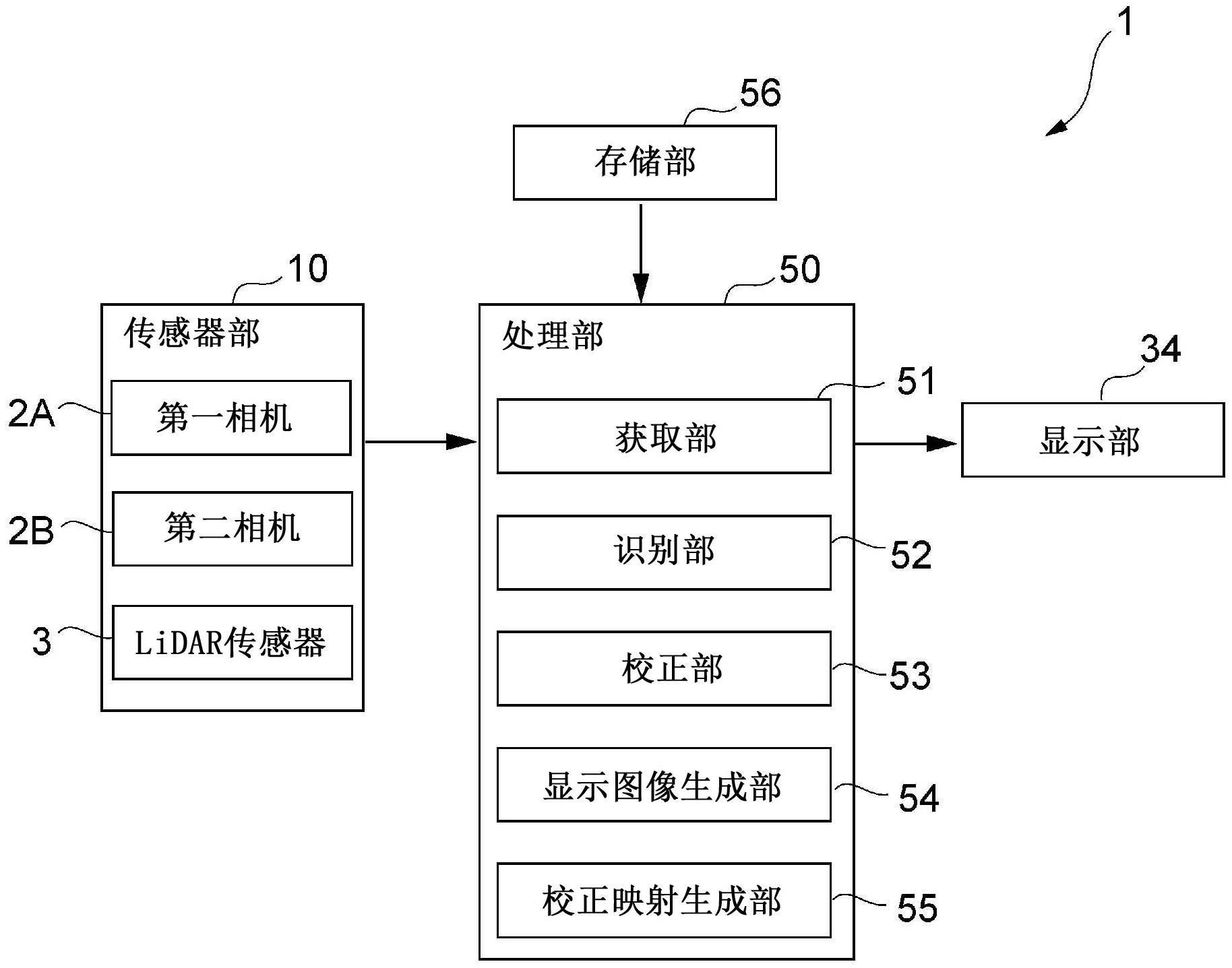
6、上述处理部将具备lidar(light detection and ranging,光探测和测距)传感器以及对识别对象物进行拍摄的图像传感器的设备的由上述lidar传感器获取的上述识别对象物的深度值参照使用上述lidar传感器的感测结果以及上述图像传感器的感测结果而生成的深度校正信息进行校正,该lidar传感器具有向上述识别对象物照射光的发光部以及接收从上述识别对象物反射的光的受光部。
7、根据这样的构成,能够对源自lidar传感器的测量误差进行校正,能够使识别对象物的识别精度提高。
8、也可以是,上述深度校正信息包括基于上述lidar传感器的感测结果的上述识别对象物的深度值与上述识别对象物的实际的深度值的差分信息。
9、也可以是,上述设备具备多个上述图像传感器以及一个上述lidar传感器,
10、上述深度校正信息包括使用从多个上述图像传感器各自的感测结果检测的上述识别对象物的位置信息而通过三角测量计算的上述识别对象物的深度值与基于作为上述lidar传感器的感测结果的深度图像的上述识别对象物的深度值的差分信息。
11、也可以是,上述设备具备至少一个上述图像传感器以及一个上述lidar传感器,
12、上述深度校正信息包括使用从一个上述图像传感器的感测结果检测的上述识别对象物的位置信息和从作为上述lidar传感器的感测结果的可靠性图像检测的上述识别对象物的位置信息而通过三角测量计算的上述识别对象物的深度值与基于作为上述lidar传感器的感测结果的深度图像的上述识别对象物的深度值的差分信息。
13、也可以是,上述识别对象物为半透明体。
14、也可以是,上述识别对象物为人类的皮肤。
15、也可以是,上述识别对象物为人类的手。
16、也可以是,上述处理部对作为上述识别对象物的人类的手势动作进行识别。
17、也可以是,上述处理部使用上述lidar传感器的感测结果以及上述图像传感器的感测结果生成上述深度校正信息。
18、也可以是,上述设备具备显示部,
19、上述处理部使用校正后的上述识别对象物的深度值,生成在上述显示部上显示的图像。
20、本技术涉及的识别方法将具备lidar(light detection and ranging,光探测和测距)传感器以及对识别对象物进行拍摄的图像传感器的设备的由上述lidar传感器获取的上述识别对象物的深度值参照使用上述lidar传感器的感测结果以及上述图像传感器的感测结果而生成的深度校正信息进行校正,该lidar传感器具有向上述识别对象物照射光的发光部以及接收从上述识别对象物反射的光的受光部。
21、本技术涉及的程序使识别装置执行如下步骤:
22、将具备lidar(light detection and ranging,光探测和测距)传感器以及对识别对象物进行拍摄的图像传感器的设备的由上述lidar传感器获取的上述识别对象物的深度值参照使用上述lidar传感器的感测结果以及上述图像传感器的感测结果而生成的深度校正信息进行校正,所述lidar传感器具有向上述识别对象物照射光的发光部以及接收从上述识别对象物反射的光的受光部。
技术特征:
1.一种识别装置,具备处理部,其中,
2.根据权利要求1所述的识别装置,其中,
3.根据权利要求2所述的识别装置,其中,
4.根据权利要求2所述的识别装置,其中,
5.根据权利要求1所述的识别装置,其中,
6.根据权利要求5所述的识别装置,其中,
7.根据权利要求6所述的识别装置,其中,
8.根据权利要求1所述的识别装置,其中,
9.根据权利要求1所述的识别装置,其中,
10.根据权利要求1所述的识别装置,其中,
11.一种识别方法,其中,
12.一种程序,所述程序使识别装置执行如下步骤:
技术总结
本申请提供识别装置、识别方法以及程序,能够提高识别对象物的识别精度。本技术涉及的识别装置具备处理部。上述处理部将具备LiDAR传感器以及对识别对象物进行拍摄的图像传感器的设备的由上述LiDAR传感器获取的上述识别对象物的深度值参照使用上述LiDAR传感器的感测结果以及上述图像传感器的感测结果而生成的深度校正信息进行校正,该LiDAR传感器具有向上述识别对象物照射光的发光部以及接收从上述识别对象物反射的光的受光部。
技术研发人员:藤原达雄
受保护的技术使用者:索尼集团公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!