基于操作者和计算机辅助设备之间的几何关系控制可重新定位的结构系统的制作方法
本发明总体上涉及电子设备,并且更特别地涉及基于操作者和计算机辅助设备之间的几何关系控制可重新定位结构。
背景技术:
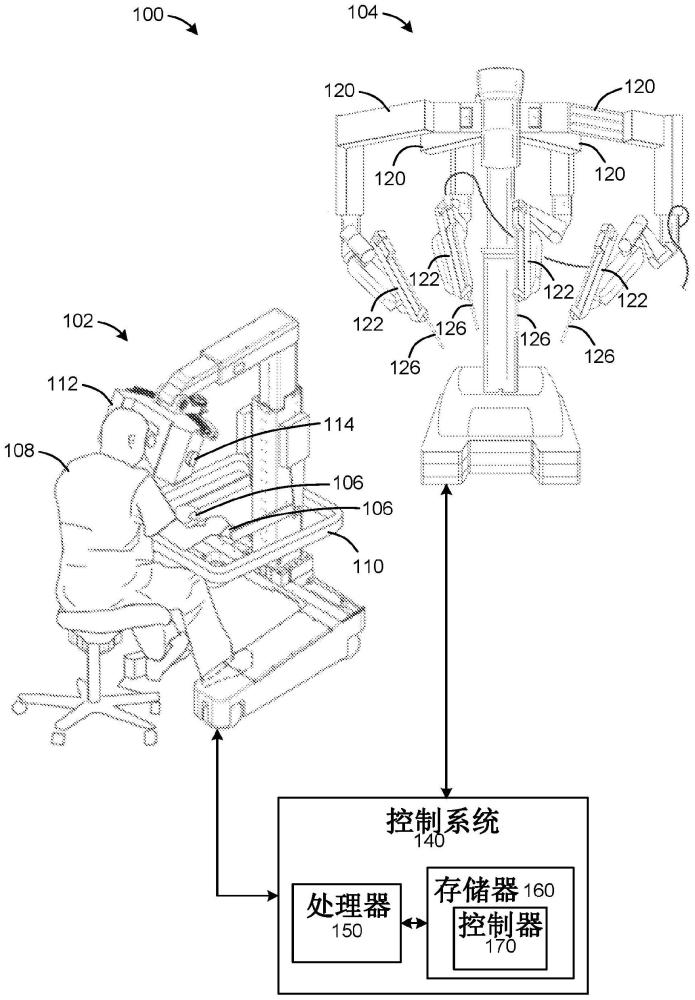
1、计算机辅助电子设备的使用越来越频繁。在工业、娱乐、教育和其它环境中尤其如此。作为医学示例,当今的医疗设施具有在手术操作室、介入治疗室、重症监护病房、急诊室等和/或诸如此类中发现的大量电子设备阵列。这些电子设备中的许多能够自主或半自主运动。人们还知道使用位于用户控制系统处的一个或多个输入设备来控制电子设备的运动和/或操作。作为具体的示例,微创机器人远程外科手术系统允许外科医生在床侧或远程位置对患者进行操作。远程外科手术通常是指使用外科手术系统进行的手术,其中外科医生使用某种形式的远程控制,诸如伺服机构来操纵外科手术器械的移动,而不是直接用手握住和移动器械。
2、当使用电子设备在工作部位执行任务时,一个或多个成像设备(例如,内窥镜)能够捕获工作部位/工作现场(worksite)的图像,为监控和/或执行任务的操作者提供视觉反馈。(一个或多个)成像设备可以是可控制的以更新工作部位的视图,该视图诸如经由显示单元被提供给操作者。显示单元可以具有透镜和/或显示屏。
3、为了使用显示单元,操作者定位其眼睛,以便直接或通过一个或多个中间部件看到一个或多个显示屏上显示的图像。然而,当眼睛相对于图像定位在不太理想的方位时,操作者可能对正在显示的图像获得不太理想的视角。不太理想的图像视角的示例影响包括无法看到正在显示的整个图像、看到不能正确融合的立体图像等。因此,操作者可能会感到沮丧、眼睛疲劳、对图像中物品的描绘不准确等。
4、因此,需要改进的技术,以改善操作者眼睛的定位或取向以及显示单元呈现的图像。
技术实现思路
1、与一些实施例一致,计算机辅助设备包括:可重新定位结构系统、致动器系统、传感器系统和控制系统。可重新定位结构系统被配置为物理地耦接到显示单元,并且显示单元被配置为显示操作者可查看的图像。致动器系统被物理耦接到可重新定位结构系统,并且致动器系统可驱动以移动可重新定位结构。传感器系统被配置为捕获与操作者头部的一部分相关联的传感器数据。控制系统被可通信地耦接到致动器系统和传感器系统,并且控制系统被配置为:基于传感器数据,确定头部的一部分相对于计算机辅助设备的一部分的几何参数,基于几何参数和目标参数确定命令运动,以及基于命令运动命令致动器系统移动可重新定位结构系统。几何参数代表操作者的至少一个眼睛相对于由显示单元显示的一个或多个图像的几何关系。与一些实施例一致,计算机辅助设备的一部分选自由以下各项组成的组:显示单元的(一个或多个)部分和可重新定位结构系统的(一个或多个)部分。
2、与一些实施例一致,一种方法包括基于传感器数据确定操作者的头部的一部分相对于计算机辅助设备的一部分的几何参数。计算机辅助设备包括可重新定位结构系统,其被配置为物理地被耦接到显示单元。显示单元被配置为显示图像。几何参数代表操作者的至少一个眼睛相对于显示单元所显示的(一个或多个)图像的几何关系。该方法进一步包括基于几何参数和目标参数确定命令运动,以及基于命令运动命令致动器系统移动可重新定位结构系统。
3、其他实施例包括但不限于一个或多个非暂时性机器可读介质,包括多个机器可读指令,当这些指令被一个或多个处理器执行时,适于使一个或多个处理器执行本文所公开的任何方法。
4、上述大体描述和以下详细描述本质上是示例性和解释性的,并且旨在提供对本公开的理解而不限制本公开的范围。就此而言,本公开的附加方面、特征和优点对于本领域技术人员来说将从以下详细描述中显而易见。
技术特征:
1.一种计算机辅助设备,其包括:
2.根据权利要求1所述的计算机辅助设备,其中所述头部的所述一部分包括所述操作者的眼睛。
3.根据权利要求1所述的计算机辅助设备,其中:
4.根据权利要求1所述的计算机辅助设备,其中所述计算机辅助设备的所述一部分包括透镜,所述透镜被定位在所述图像的位置和所述至少一个眼睛的预期位置之间。
5.根据权利要求1所述的计算机辅助设备,其中所述几何关系是所述至少一个眼睛和所述图像之间的光学距离。
6.根据权利要求1所述的计算机辅助设备,其中所述几何参数包括从所述头部的所述一部分到所述计算机辅助设备的所述一部分的距离。
7.根据权利要求6所述的计算机辅助设备,其中所述头部的所述一部分包括所述至少一个眼睛。
8.根据权利要求6所述的计算机辅助设备,其中所述显示单元的所述部分和所述可重新定位结构系统的所述部分由以下各项共同组成:
9.根据权利要求6所述的计算机辅助设备,其中:
10.根据权利要求1至9中任一项所述的计算机辅助设备,其中所述至少一个眼睛包括第一眼睛和第二眼睛,并且其中确定所述几何参数包括:
11.根据权利要求1至9中任一项所述的计算机辅助设备,其中确定所述几何参数包括:
12.根据权利要求1至9中任一项所述的计算机辅助设备,其中确定所述几何参数包括:
13.根据权利要求1至9中任一项所述的计算机辅助设备,其进一步包括:
14.根据权利要求1至9中任一项所述的计算机辅助设备,其中:
15.根据权利要求1至9中任一项所述的计算机辅助设备,其进一步包括:
16.根据权利要求1至9中任一项所述的计算机辅助设备,其中所述控制系统被配置为通过以下方式确定所述几何参数:
17.根据权利要求1至9中任一项所述的计算机辅助设备,其进一步包括:
18.根据权利要求17所述的计算机辅助设备,其中所述控制系统进一步被配置为,在命令所述第二可重新定位结构将所述头枕远离所述显示单元移动之后:
19.根据权利要求1至9中任一项所述的计算机辅助设备,其进一步包括:
20.根据权利要求19所述的计算机辅助设备,其中所述目标参数对应于从所述至少一个眼睛到所述计算机辅助设备的所述一部分的第一目标距离,其中所述第二目标参数对应于从所述至少一个眼睛到所述计算机辅助设备的所述一部分的第二目标距离,并且其中所述第二目标距离大于所述第一目标距离。
21.根据权利要求20所述的计算机辅助设备,其中所述控制系统进一步被配置为,在所述显示单元或所述可重新定位结构系统已经进入所述头部输入模式之后并响应于触发事件:
22.根据权利要求21所述的计算机辅助设备,其中所述触发事件包括:
23.根据权利要求1至9中任一项所述的计算机辅助设备,其中所述控制系统进一步配置为,响应于所述显示单元的手动重新定位,基于以下各项设定所述目标参数:
24.根据权利要求1至9中任一项所述的计算机辅助设备,其中所述显示单元进一步包括光学元件,其中所述传感器系统包括在远离所述操作者的方向上设置在光学元件后面的传感器。
25.根据权利要求1至9中任一项所述的计算机辅助设备,其中所述目标参数基于选自由以下各项组成的组中的至少一个输入确定:
26.一种用于控制计算机辅助设备的方法,所述计算机辅助设备包括被配置为物理耦接到显示单元的可重新定位结构系统,所述方法包括:
27.根据权利要求26所述的方法,其中:
28.根据权利要求26所述的方法,其中:
29.根据权利要求26所述的方法,其中所述几何关系是所述至少一个眼睛和所述图像之间的光学距离。
30.根据权利要求26所述的方法,其中所述几何参数包括从所述头部的所述一部分到所述计算机辅助设备的所述一部分的距离。
31.根据权利要求26所述的方法,其中所述至少一个眼睛包括第一眼睛和第二眼睛,并且其中确定所述几何参数包括:
32.根据权利要求26所述的方法,其中确定所述几何参数包括:
33.根据权利要求26所述的方法,其中确定所述几何参数包括:
34.根据权利要求26所述的方法,其中所述可重新定位结构系统包括被配置为支撑所述显示单元的第一可重新定位结构和被耦接到头枕且能够驱动以使所述头枕相对于所述显示单元移动的第二可重新定位结构,其中基于所述命令运动移动所述可重新定位结构系统的所述致动器系统移动所述第一可重新定位结构,使得所述显示单元在共同参考系中移动,所述方法进一步包括:
35.根据权利要求26所述的方法,其中所述致动器系统基于所述命令运动移动所述可重新定位结构系统使:
36.根据权利要求26所述的方法,其中确定所述几何参数包括:
37.根据权利要求26所述的方法,其中所述可重新定位结构系统包括被配置为支撑所述显示单元的第一可重新定位结构和能够驱动以使头枕相对于所述显示单元移动的第二可重新定位结构,所述方法进一步包括:
38.根据权利要求26所述的方法,其中所述可重新定位结构系统包括被配置为支撑所述显示单元的第一可重新定位结构和能够驱动以使头枕相对于所述显示单元移动的第二可重新定位结构,所述方法进一步包括:
39.根据权利要求38所述的方法,其进一步包括,在所述显示单元或所述可重新定位结构系统已经进入所述头部输入模式之后并响应于触发事件:
40.根据权利要求39所述的方法,其中所述触发事件包括:
41.根据权利要求26所述的方法,其进一步包括,响应于所述显示单元的手动重新定位,基于以下各项设定所述目标参数:
42.根据权利要求26所述的方法,其进一步包括:基于选自由以下各项组成的组中的至少一个输入确定所述目标参数:
43.一种或多种非暂时性机器可读介质,其包括多个机器可读指令,当所述多个机器可读指令被一个或多个处理器执行时,适于使所述一个或多个处理器执行根据权利要求26至42中任一项所述的方法。
技术总结
基于代表操作者和显示单元的几何关系的几何参数控制计算机辅助设备的技术包括以下内容。计算机辅助设备包括可重新定位结构系统,该结构系统配置为支持显示单元,该显示单元显示操作者可查看的图像;被物理耦接到可重新定位结构系统的致动器系统;传感器系统,该传感器系统配置为捕获与操作者头部的一部分相关联的传感器数据;以及控制系统。控制系统被配置为:基于传感器数据确定头部的一部分相对于计算机辅助设备的一部分的几何参数,基于几何参数和目标参数确定命令运动,以及基于命令运动命令致动器系统移动可重新定位结构。
技术研发人员:M·S·帕拉斯特加里,J·A·格拉瑟,O·格林伯格,P·G·格里菲思,K·李,A·C·汤普森,K·J·瓦扎
受保护的技术使用者:直观外科手术操作公司
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!