三维场景表面简化方法、设备、存储介质及装置与流程
本发明涉及计算机,尤其涉及一种三维场景表面简化方法、设备、存储介质及装置。
背景技术:
1、射线跟踪模型是一种被广泛用于移动通信和个人通信环境中的预测无线电波传播特性的技术,可以用来辨认出多径信道中收发之间所有可能的射线路径。通过三维场景建模,可使用射线跟踪模型遍历三维场景模型中的各个表面,判断电磁波受该表面影响而发生的传播情况变化。
2、随着三维场景越来越复杂,其包含的表面数量非常多,导致射线跟踪模型计算时间增长。常规的模型简化方法,会造成模型精度损失,进而降低计算准确性。
3、上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本发明的主要目的在于提供一种三维场景表面简化方法、设备、存储介质及装置,旨在解决现有技术中常规的模型简化方法,会造成模型精度损失,进而降低计算准确性的技术问题。
2、为实现上述目的,本发明提供一种三维场景表面简化方法,所述三维场景表面简化方法包括以下步骤:
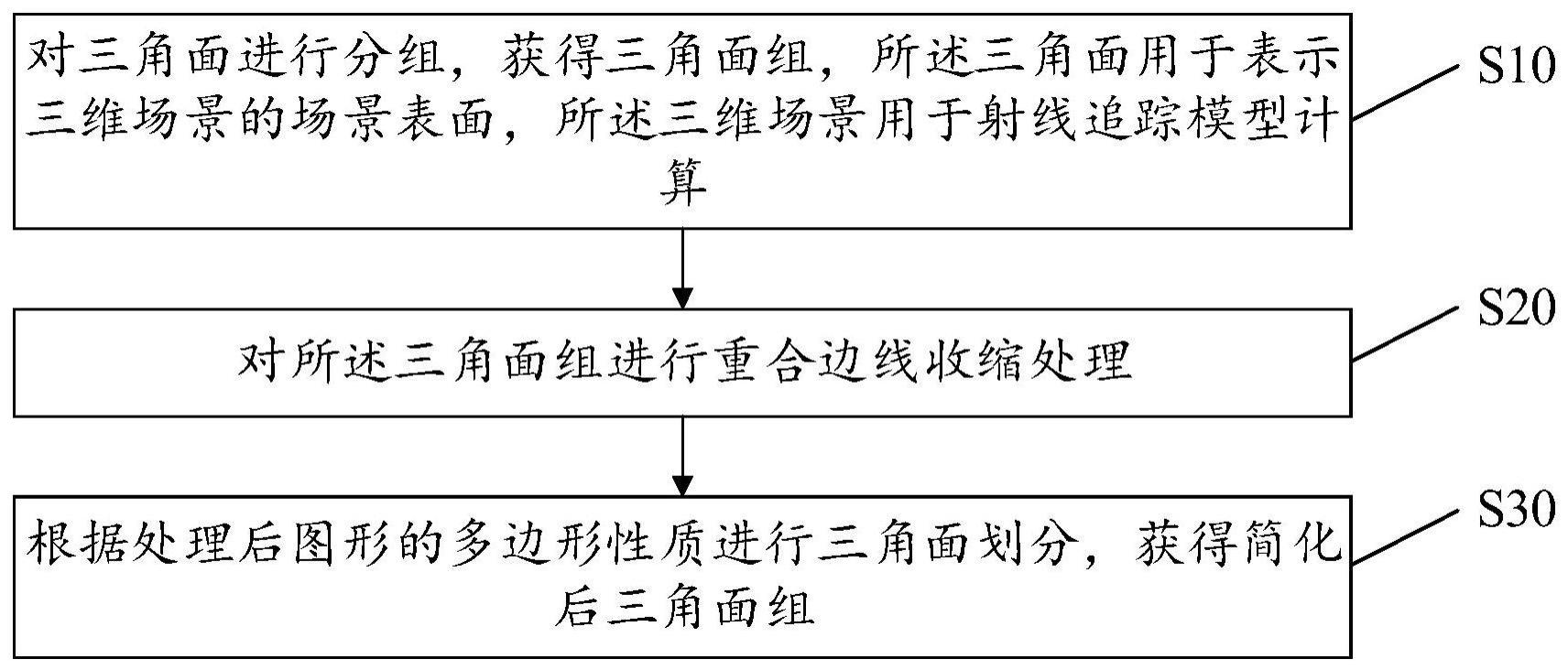
3、对三角面进行分组,获得三角面组,所述三角面用于表示三维场景的场景表面,所述三维场景用于射线追踪模型计算;
4、对所述三角面组进行重合边线收缩处理;
5、根据处理后图形的多边形性质进行三角面划分,获得简化后三角面组。
6、可选地,所述根据处理后图形的多边形性质进行三角面划分,获得简化后三角面组的步骤,包括:
7、根据处理后图形的多边形性质确定所述处理后图形的边线连接关系和内角角度;
8、根据所述边线连接关系和所述内角角度确定所述处理后图形的多边形种类;
9、根据所述多边形种类进行三角面划分,获得简化后三角面组。
10、可选地,所述根据所述多边形种类进行三角面划分,获得简化后三角面组的步骤,包括:
11、在所述多边形种类为凸多边形时,将图像顶点与除相邻点外的其他所有点连接,形成新边线;
12、根据所述新边线进行三角面划分,获得简化后三角面组。
13、可选地,所述根据所述多边形种类进行三角面划分,获得简化后三角面组的步骤,包括:
14、在所述多边形种类为凹多边形时,通过耳剪裁算法进行三角形划分,直至所述处理后图形被拆分为多个三角面,获得简化后三角面组。
15、可选地,所述根据所述多边形种类进行三角面划分,获得简化后三角面组的步骤,包括:
16、在所述多边形种类为岛洞多边形时,延长所述岛洞多边形的任意边线两端至与外多边形相交,形成新顶点;
17、基于所述新顶点进行耳剪裁划分,获得简化后三角面组。
18、可选地,所述对三角面进行分组,获得三角面组的步骤,包括:
19、获取三角面的材质、法线以及位置;
20、根据所述材质、所述法线以及所述位置中的至少一项对三角面进行分组,获得三角面组。
21、可选地,所述对所述三角面组进行重合边线收缩处理的步骤,包括:
22、检测所述三角面组中是否存在顶点相同,且索引相反的边线;
23、根据检测结果对所述三角面组进行重合边线收缩处理。
24、此外,为实现上述目的,本发明还提出一种三维场景表面简化设备,所述三维场景表面简化设备包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的三维场景表面简化程序,所述三维场景表面简化程序配置为实现如上文所述的三维场景表面简化方法。
25、此外,为实现上述目的,本发明还提出一种存储介质,所述存储介质上存储有三维场景表面简化程序,所述三维场景表面简化程序被处理器执行时实现如上文所述的三维场景表面简化方法。
26、此外,为实现上述目的,本发明还提出一种三维场景表面简化装置,所述三维场景表面简化装置包括:分组模块、处理模块以及简化模块;
27、所述分组模块,用于对三角面进行分组,获得三角面组,所述三角面用于表示三维场景的场景表面,所述三维场景用于射线追踪模型计算;
28、所述处理模块,用于对所述三角面组进行重合边线收缩处理;
29、所述简化模块,用于根据处理后图形的多边形性质进行三角面划分,获得简化后三角面组。
30、在本发明中,公开了对三角面进行分组,获得三角面组,三角面用于表示三维场景的场景表面,三维场景用于射线追踪模型计算,对三角面组进行重合边线收缩处理,根据处理后图形的多边形性质进行三角面划分,获得简化后三角面组;由于本发明中通过重合边线收缩的思路合并三角面,争取场景表面最小三角面化,从而能够在不对模型精度进行任何改变、不影响计算结果的情况下,尽力减少射线跟踪模型计算数据量,进而能够降低计算时长,提升射线跟踪模型可用性。
技术特征:
1.一种三维场景表面简化方法,其特征在于,所述三维场景表面简化方法包括以下步骤:
2.如权利要求1所述的三维场景表面简化方法,其特征在于,所述根据处理后图形的多边形性质进行三角面划分,获得简化后三角面组的步骤,包括:
3.如权利要求2所述的三维场景表面简化方法,其特征在于,所述根据所述多边形种类进行三角面划分,获得简化后三角面组的步骤,包括:
4.如权利要求2所述的三维场景表面简化方法,其特征在于,所述根据所述多边形种类进行三角面划分,获得简化后三角面组的步骤,包括:
5.如权利要求2所述的三维场景表面简化方法,其特征在于,所述根据所述多边形种类进行三角面划分,获得简化后三角面组的步骤,包括:
6.如权利要求1至5中任一项所述的三维场景表面简化方法,其特征在于,所述对三角面进行分组,获得三角面组的步骤,包括:
7.如权利要求1至5中任一项所述的三维场景表面简化方法,其特征在于,所述对所述三角面组进行重合边线收缩处理的步骤,包括:
8.一种三维场景表面简化设备,其特征在于,所述三维场景表面简化设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的三维场景表面简化程序,所述三维场景表面简化程序被所述处理器执行时实现如权利要求1至7中任一项所述的三维场景表面简化方法。
9.一种存储介质,其特征在于,所述存储介质上存储有三维场景表面简化程序,所述三维场景表面简化程序被处理器执行时实现如权利要求1至7中任一项所述的三维场景表面简化方法。
10.一种三维场景表面简化装置,其特征在于,所述三维场景表面简化装置包括:分组模块、处理模块以及简化模块;
技术总结
本发明涉及计算机技术领域,公开了一种三维场景表面简化方法、设备、存储介质及装置,该方法包括:对三角面进行分组,获得三角面组,三角面用于表示三维场景的场景表面,三维场景用于射线追踪模型计算,对三角面组进行重合边线收缩处理,根据处理后图形的多边形性质进行三角面划分,获得简化后三角面组;由于本发明中通过重合边线收缩的思路合并三角面,争取场景表面最小三角面化,从而能够在不对模型精度进行任何改变、不影响计算结果的情况下,尽力减少射线跟踪模型计算数据量,进而能够降低计算时长,提升射线跟踪模型可用性。
技术研发人员:张晓宇,董江波,马力鹏,李文智,邢玙,孙伟,齐航,席思雨,牛晓旭,冀涵叶,张华,刘建飞,刘兴旭
受保护的技术使用者:中国移动通信集团设计院有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!