针对非理想圆形轨迹且运动重复性差的CBCT校准方法与流程
本发明涉及cbct校准,具体为针对非理想圆形轨迹且运动重复性差的cbct校准方法。
背景技术:
1、计算机断层成像技术是通过对物体进行不同角度的射线投影测量获取物体横截面信息的成像技术。按照射线束采集方式,可分为扇形束ct和锥形束ct两大类。其中扇形束螺旋ct目前已经在医疗领域广泛应用,锥形束ct(cone-beamct,cbct)由于剂量低,空间分辨率高和扫描速度快等优点已成为行业热点。临床应用中,cbct图像重建通常采用fdk算法来对图像进行重建。fdk算法有两个前提条件:第一、射线源焦点与探测器中心的连线必须通过旋转中心线,且垂直于探测器平面;第二、旋转轴应与探测器的中心列方向平行。然而在实际搭建cbct系统时,由于机械误差的存在,cbct系统不能严格满足上述2个前提条件,因此存在一定的几何偏移。如果不对偏移进行校正,重建的图像会产生严重的伪影,影响图像质量。因此,几何参数的精确求解(即几何校正)是实现ct图像精确重建的前提。
2、目前业内使用的几何校正方法需要设计校正模体,通过多角度或者一个角度下获取的校正体模的投影数据,利用解析方法获得ct系统的几何参数,然后根据该参数进行后续图像重建。各种cbct校正方法需要系统运动为标准的圆周运动,且系统的运动具有高度重复性(即运动完全稳定)。在此前提下,校正算法对系统进行刚性位移校正。然而在一些实际应用场景中,受限于机械精度,系统运动不规则,且重复性较差,即系统运动具有随机派偏差,如在运动颠簸状态下的影像扫描采集。针对这类特殊应用场景,目前业内尚未有成熟的解决方案。
技术实现思路
1、本发明所解决的技术问题在于提供针对非理想圆形轨迹且运动重复性差的cbct校准方法,以解决技术背景中所提到的问题。为实现上述目的,本发明提供如下技术方案:针对非理想圆形轨迹且运动重复性差的cbct校准方法,具体包括以下内容:
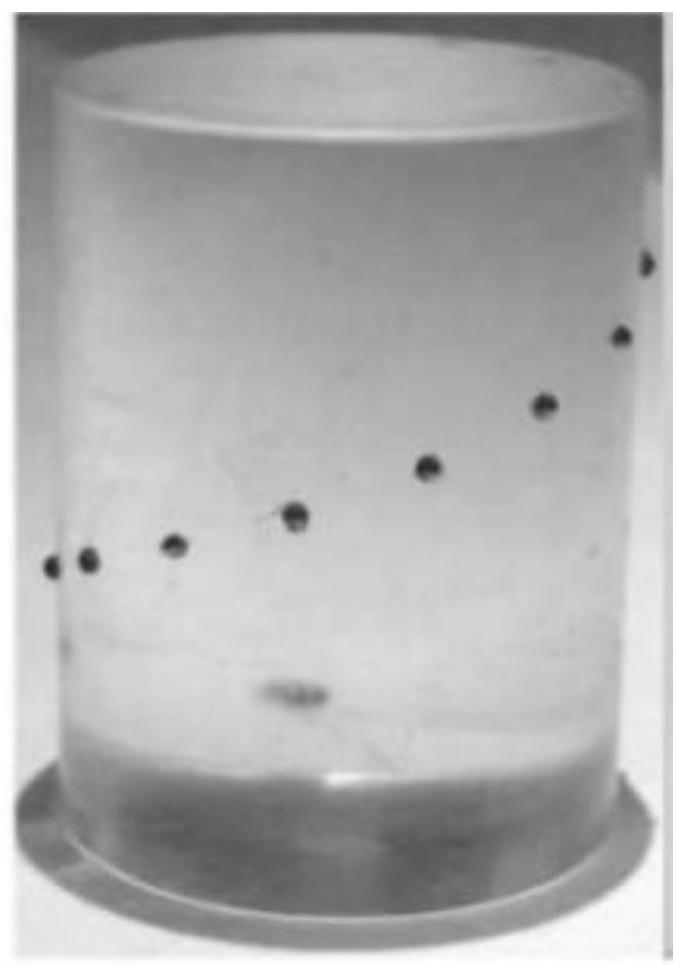
2、(1)在圆柱形模体表面上镶嵌钢珠,记录各钢珠的几何位置,将模体放置在cbct中心,对圆柱形模体进行照射,采集图像,得到二维平片;
3、(2)通过图像处理算法将平片进行处理,自动将金属点的坐标标记出来,而测量结果为探测器平板坐标系中的坐标值
4、(3)根据模体中已知的钢珠标记点的坐标值和第二步中自动标记出来的钢珠标记点序号,得到第二步中各金属标记点在模体坐标系中的坐标pi,并找到pi对应的探测器平板坐标系中的坐标值qi;
5、(4)计算矩阵mt:设坐标在平板上的投影在平板坐标系中为则
6、
7、其中为模体坐标系到cbct坐标系的转换矩阵,mp为cbct坐标系中的点到平板坐标系的投影矩阵,即
8、
9、设为从平片图像中提取的在平板上的投影坐标,则解
10、
11、可得对于模体坐标系中任意点pi,mt·pi为该点在cbct坐标系中的坐标;
12、(5)对每个gantry角度θ计算m(θ);
13、(6)将各角度的采集的投影图像用修正矩阵m(θ)进行修正,然后再进行三维重建。
14、优选地,所述(1)中圆柱形模体表面嵌有16个钢珠,且呈螺旋状分布。
15、优选地,所述(1)中采集图像的方法为:在0°-359°每个角度分别对圆柱形模体进行照射,采集图像,得到360张二维平片。
16、优选地,所述(2)中图像处理算法为霍夫变换。
17、优选地,所述(5)的计算方法为:则在gantry角度θ下,可得方程:
18、qi=mp·m(θ)·mt·pi
19、设为从平片图像中提取的在平板上的投影坐标,则解
20、
21、得m(θ),即为在gantry为θ角度下的修正矩阵。
22、与现有技术相比,本发明提供的方法可以对非理想圆形轨迹且运动重复性差的cbct进行校准,实现了ct图像精确重建。
技术特征:
1.针对非理想圆形轨迹且运动重复性差的cbct校准方法,其特征在于,具体包括以下内容:
2.根据权利要求1所述的针对非理想圆形轨迹且运动重复性差的cbct校准方法,其特征在于:所述(1)中圆柱形模体表面嵌有16个钢珠,且呈螺旋状分布。
3.根据权利要求1所述的针对非理想圆形轨迹且运动重复性差的cbct校准方法,其特征在于:所述(1)中采集图像的方法为:在0°-359°每个角度分别对圆柱形模体进行照射,采集图像,得到360张二维平片。
4.根据权利要求1所述的针对非理想圆形轨迹且运动重复性差的cbct校准方法,其特征在于:所述(2)中图像处理算法为霍夫变换。
5.根据权利要求1所述的针对非理想圆形轨迹且运动重复性差的cbct校准方法,其特征在于:所述(5)的计算方法为:则在gantry角度θ下,可得方程:
技术总结
本发明提供了针对非理想圆形轨迹且运动重复性差的CBCT校准方法,包括:在模体表面上镶嵌钢珠,记录各钢珠的几何位置,将模体放置在CBCT中心,对模体进行照射,采集图像,得到二维平片;通过图像处理算法将平片进行处理,自动将金属点的坐标标记出来;根据模体中已知的钢珠标记点的坐标值和第二步中自动标记出来的钢珠标记点序号,得到各金属标记点在模体坐标系中的坐标,并找到对应的探测器平板坐标系中的坐标值;计算矩阵;对每个Gantry角度θ计算修正矩阵;将各角度的采集的投影图像用修正矩阵进行修正,然后再进行三维重建。本发明提供的方法可以对非理想圆形轨迹且运动重复性差的CBCT进行校准,实现了CT图像精确重建。
技术研发人员:陈蔚海,周云,马丽
受保护的技术使用者:太丛信息科技(上海)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!