用于自动驾驶的点云感知识别模型评估方法及装置与流程
本申请涉及自动驾驶仿真的,更具体地涉及一种用于自动驾驶的点云感知识别模型评估方法及装置。
背景技术:
1、点云感知识别是自动驾驶仿真流程中的关键环节,在研发机或服务器中使用仿真流控引擎运行点云感知识别算法,输入数据为从车端录制的原始点云数据,输出数据为算法计算出的最新结果数据。在最新的计算结果数据中有新感知识别算法计算出来的障碍物标记,若能对这种新识别的障碍物标记进行效果评测,以达到在自动驾驶系统搭建新算法路测之前,准确的把新算法模型的效果进行一个相对客观的评估,就能够提升研发迭代效率和降低测试成本。
2、相关技术中对点云感知识别的评价方案中,主要还是以人工标注真值数据,然后和新算法进行对比和效果评估为主,首先把录制的原始点云数据拆分成帧,送到人工进行点云的标注,标注后将标注数据注入回数据包内,再通过算法仿真识别出新的结果,将新结果和标注数据进行对比,从而达到识别结果的效果评估。
3、上述方案需要以人工的方式对数据进行真值标注,数据需要标注的数据较多,人工成本会越来越高。对于数据还有拆分和流转的过程,从数据拆分到送标再到数据返回合成,数据的整体流转效率也会比较低。存在有人工成本高且效率较低的问题。
4、针对上述问题,本申请提供了一种用于自动驾驶的点云感知识别模型评估方法和装置,以解决上述问题中的至少一个。
技术实现思路
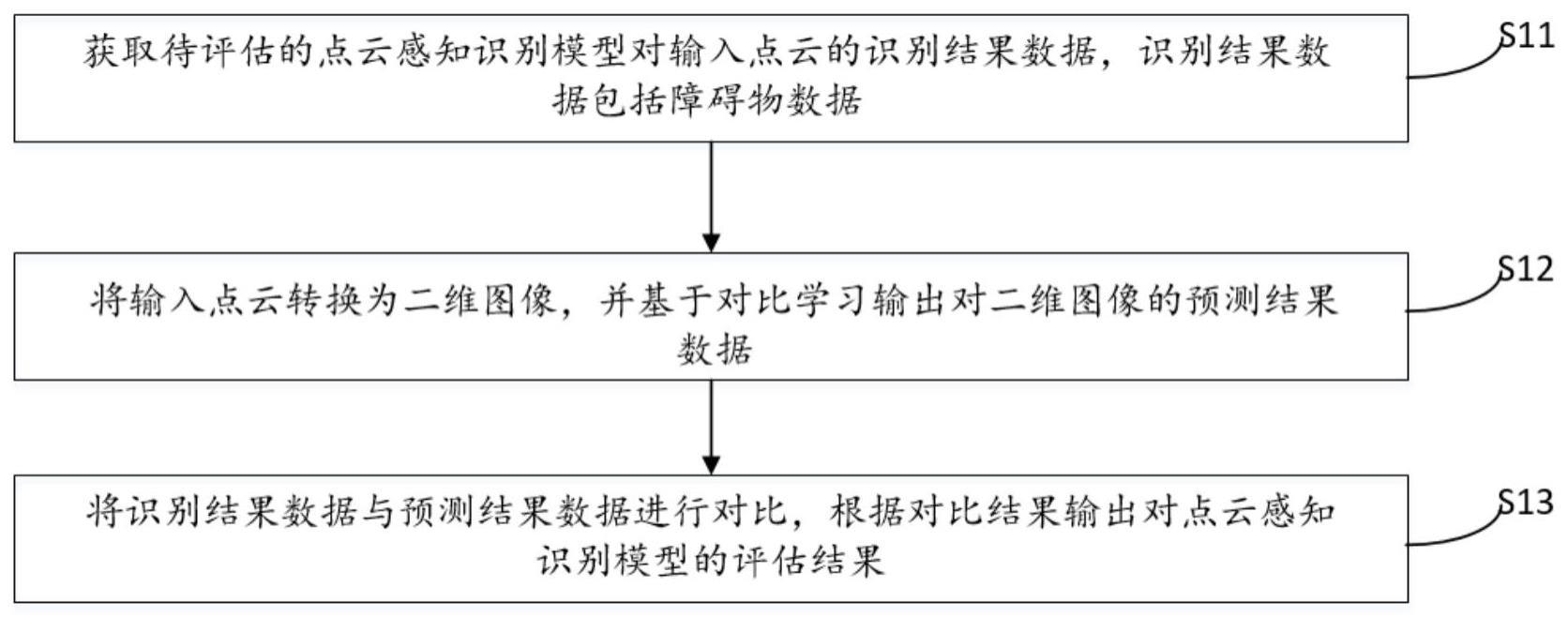
1、为了解决上述问题而提出了本申请。根据本申请一方面,提供了一种用于自动驾驶的点云感知识别模型评估方法,所述方法包括:获取待评估的点云感知识别模型对输入点云的识别结果数据,所述识别结果数据包括障碍物数据;将所述输入点云转换为二维图像,并基于对比学习输出对所述二维图像的预测结果数据;将所述识别结果数据与所述预测结果数据进行对比,根据对比结果输出对所述点云感知识别模型的评估结果。
2、在本申请的一个实施例中,所述基于对比学习输出对所述二维图像的预测结果数据,包括:对训练集中的每张图像进行两种不同的预处理得到第一图像和第二图像;利用在线网络输出对所述第一图像的预测结果;利用目标网络输出对所述第二图像的映射特征;基于所述预测结果和所述映射特征构建损失函数;基于所述损失函数优化训练所述在线网络;基于训练好的在线网络输出对所述二维图像的预测结果数据。
3、在本申请的一个实施例中,所述利用在线网络输出对所述第一图像的预测结果,包括:利用在线网络执行如下操作:对所述第一图像进行特征提取,得到第一特征;对所述第一特征进行映射,得到所述第一图像的映射特征;对所述第一图像的映射特征进行预测,得到预测结果。
4、在本申请的一个实施例中,所述利用目标网络输出对所述第二图像的映射特征,包括:利用目标网络执行如下操作:对所述第二图像进行特征提取,得到第二特征;对所述第二特征进行映射,得到所述第二图像的映射特征。
5、在本申请的一个实施例中,所述目标网络的参数更新来自于所述在线网络。
6、在本申请的一个实施例中,所述方法还包括:在输出所述预测结果数据之后,建立所述预测结果数据的评估指标,当所述评估指标超过预设阈值时,再将所述识别结果数据与所述预测结果数据进行对比。
7、在本申请的一个实施例中,所述根据对比结果输出对所述点云感知识别模型的评估结果,包括:根据对比结果评估所述点云感知识别模型的召回率和准确率,并输出评估结果。
8、在本申请的一个实施例中,所述方法还包括:在得到所述评估结果之后,基于所述评估结果对所述点云感知识别模型进行优化和迭代。
9、根据本申请的另一方面,本申请还提供了一种用于自动驾驶的点云感知识别模型评估装置,所述装置包括存储器和处理器,所述存储器上存储有由所述处理器运行的计算机程序,所述计算机程序在被所述处理器运行时,使得所述处理器执行上述的用于自动驾驶的点云感知识别模型评估方法。
10、根据本申请的又一方面,一种存储介质,所述存储介质上存储有计算机程序,所述计算机程序在由处理器运行时,使得所述处理器执行上述的用于自动驾驶的点云感知识别模型评估方法。
11、本申请的用于自动驾驶的点云感知识别模型评估方法和装置,在对点云感知识别模型的识别结果进行评估时,将输入点云转换为二维图像再通过对比学习得到预测结果数据,最后通过将识别结果数据和预测结果数据进行对比,根据对比的结果来输出点云感知识别模型的评估结果,不需要人工标注数据或仅需少量标注,减少了人工成本,并且数据的流转过程更少,解决了整体流转效率较低的问题。
技术特征:
1.一种用于自动驾驶的点云感知识别模型评估方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述基于对比学习输出对所述二维图像的预测结果数据,包括:
3.根据权利要求2所述的方法,其特征在于,所述利用在线网络输出对所述第一图像的预测结果,包括:利用在线网络执行如下操作:
4.根据权利要求2所述的方法,其特征在于,所述利用目标网络输出对所述第二图像的映射特征,包括:利用目标网络执行如下操作:
5.根据权利要求2所述的方法,其特征在于,所述目标网络的参数更新来自于所述在线网络。
6.根据权利要求1-5中的任一项所述的方法,其特征在于,所述方法还包括:在输出所述预测结果数据之后,建立所述预测结果数据的评估指标,当所述评估指标超过预设阈值时,再将所述识别结果数据与所述预测结果数据进行对比。
7.根据权利要求1-5中的任一项所述的方法,其特征在于,所述根据对比结果输出对所述点云感知识别模型的评估结果,包括:
8.根据权利要求1-5中的任一项所述的方法,其特征在于,所述方法还包括:
9.一种用于自动驾驶的点云感知识别模型评估装置,其特征在于,所述装置包括存储器和处理器,所述存储器上存储有由所述处理器运行的计算机程序,所述计算机程序在被所述处理器运行时,使得所述处理器执行如权利要求1-8中的任一项所述的用于自动驾驶的点云感知识别模型评估方法。
10.一种存储介质,其特征在于,所述存储介质上存储有计算机程序,所述计算机程序在由处理器运行时,使得所述处理器执行如权利要求1-8中的任一项所述的用于自动驾驶的点云感知识别模型评估方法。
技术总结
本申请涉及一种用于自动驾驶的点云感知识别模型评估方法及装置,所述方法包括:获取待评估的点云感知识别模型对输入点云的识别结果数据,所述识别结果数据包括障碍物数据;将所述输入点云转换为二维图像,并基于对比学习输出对所述二维图像的预测结果数据;将所述识别结果数据与所述预测结果数据进行对比,根据对比结果输出对所述点云感知识别模型的评估结果。本申请具有减少人工标注成本,提升流转效率的效果。
技术研发人员:周清
受保护的技术使用者:九识智行(北京)科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!