一种考虑平行不对中的花键联轴器的横向和转角刚度的改进方法与流程
本发明涉及的是一种花键联轴器刚度的解析方法,具体地说是花键联轴器的横向和转角刚度计算方法。
背景技术:
1、由于高速履带车辆传动部件较多,工作在多变的载荷和复杂的路况下,传动系统在交变和冲击载荷下更容易失效,并且由于振动产生的齿间滑动会导致齿面过早磨损。因此,确保传动系统的稳定性和可靠性至关重要。花键联轴器作为传动系统不可缺少的一部分,其性能直接关系到高速履带车辆能否可靠工作。由于花键联轴器经常处于复杂工况下,导致花键一直处于轻微不对中状态下,不对中会导致花键联轴器产生弯曲,并给花键轴带来额外的负载。因此,研究不对中花键联轴器刚度特性具有十分重要的意义。
2、对于从以前的研究中可以看出,大多数工作都集中在不对中花键联轴器的啮合力和的载荷分布上。花键联轴器刚度的研究大多是在健康状态下进行的,而对不对中下的刚度特性的研究很少。一些学者采用能量法计算轮齿啮合刚度,进而推导出花键刚度表达式。然而,在计算轮齿啮合刚度时,基体和轮齿悬臂梁在齿根处重叠,这导致了传统方法中能量的重复计算。
技术实现思路
1、本发明的目的在于提供能解决现有花键不对中故障表征模型及动力学分析技术中所存在问题的一种考虑平行不对中的花键联轴器的横向和转角刚度的改进方法。
2、本发明的目的是这样实现的:
3、本发明一种考虑平行不对中的花键联轴器的横向和转角刚度的改进方法,其特征是:
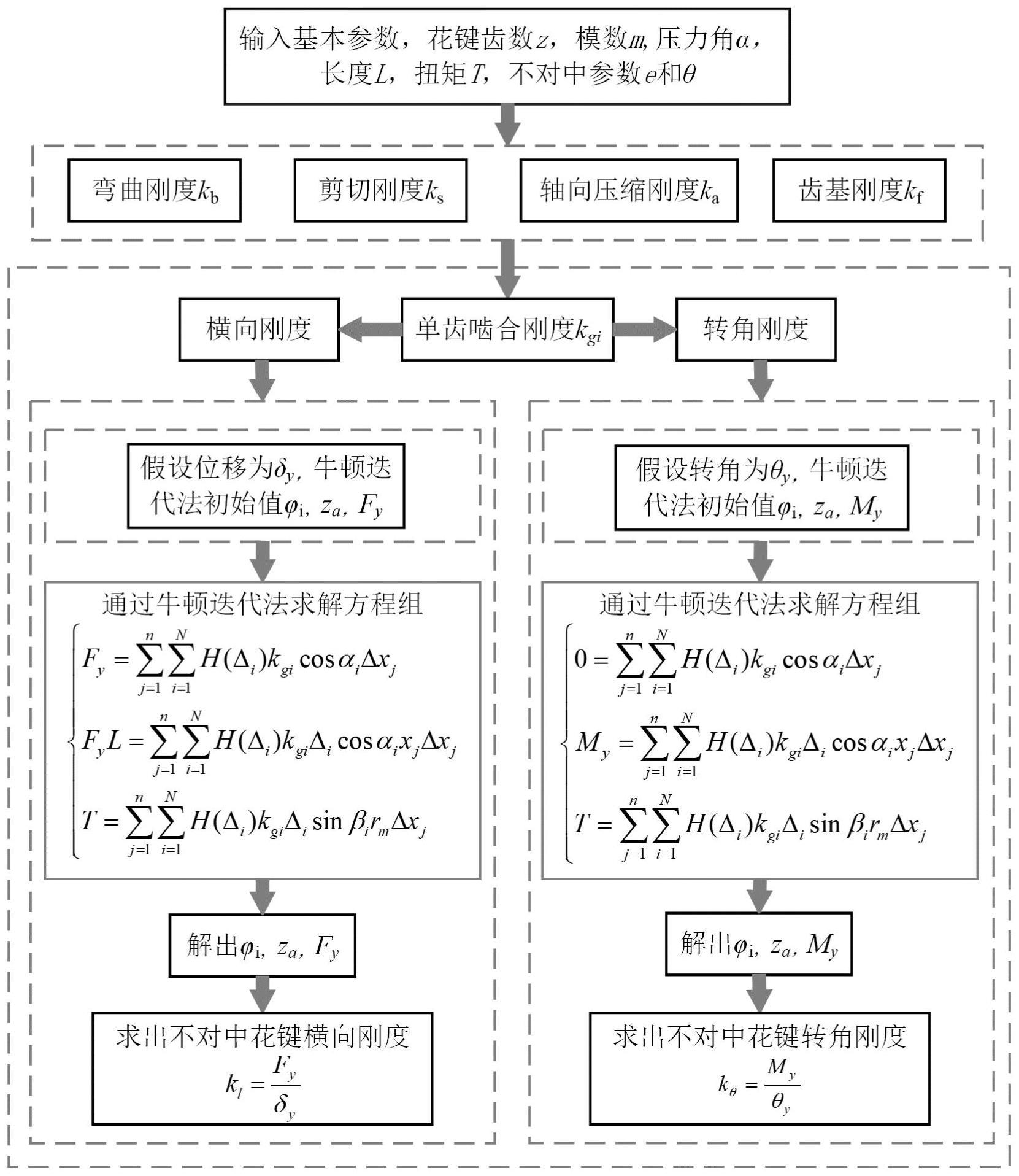
4、(1)建立不对中花键联轴器的载荷和变形的示意图,根据不对中花键的变形几何关系,推导出不对中花键啮合状态下载荷与变形的平衡方程;
5、(2)根据能量法来推导单齿啮合刚度,其中考虑齿基刚度,并通过去除轮齿和基体能量的重复计算,修正轮齿啮合刚度;
6、(3)根据步骤(2)中得到的花键单齿啮合刚度,带入到步骤(1)中得到的啮合力平衡方程,计算出不对中花键联轴器的横向刚度和转角刚度。
7、本发明还可以包括:
8、1、步骤(1)中,推导不对中花键啮合状态下载荷与变形的平衡方程过程为:
9、a.当花键存在不对中时,假设x方向、y方向不对中量分别为x0、y0,则径向不对中量e为:
10、
11、设径向不对中量e与x轴夹角为θ,则有:
12、
13、b.在笛卡尔坐标系oxy下,假设花键总共有n个齿,记x轴正上方的齿的编号为1,顺时针依次为2、3、4,…i,第i个齿中心线与y轴的夹角如下:
14、
15、此时花键各齿等效啮合距离li为:
16、
17、则不对中花键联轴器各单齿的啮合刚度kgi表示为:
18、kgi=f(li);
19、c.根据切片法来获取不对中花键联轴器外部载荷和变形的关系,首先将花键联轴器分成独立的切片,其厚度为dz,然后从啮合齿形的角度确定单片受力,再通过积分得到不对中花键的整体载荷,当外花键轴发生变形时,切片的偏移量δ(z)表示为:
20、δ(z)=(z-za)θx;
21、d.假设花键未发生不对中时的初始啮合位置的节圆半径为rm;当不存在不对中e时,当外花键切片在外载荷的作用下移动了位移δ,每个齿的节圆半径rmi如下:
22、
23、当存在不对中e时,且切片有位移δ,每个齿的啮合圆半径rmi如下:
24、
25、e.载荷对花键造成的位移δ和不对中e都会引起每个齿的法向穿透,第i个齿位移δ引起的法向穿透量δb1i为:
26、δb1i=δcosαi
27、其中是第i个齿啮合处法线与y方向的夹角,βi是齿中心线与啮合线的夹角;
28、不对中e引起的法向穿透量δb2i为:
29、
30、假设外花键轴在侧向力和扭矩作用下的扭转位移为则由于扭矩移而导致的第i个齿啮合点的法向穿透量δti为:
31、
32、总法向穿透表达式δi为:
33、δi=δb1i+δb2i+δti;
34、f.对于第i个齿对,啮合齿产生的法向力fi表达式如下:
35、dfi=h(δi)kgiδidz
36、其中kgi是花键不对中情况下每单位长度的第i个齿对的单齿啮合刚度,h(δi)是方程中定义的单位阶跃函数,
37、
38、g.通过组合所有齿片的力并且沿着轴向积分,得到齿变形与外载荷之间的关系如下:
39、
40、式中,n、n、xj和δxj分别表示花键沿着轴向分割的切片数、总齿数、切片j的轴向坐标和切片j的长度。
41、2、步骤(2)中,计算单齿啮合刚度的步骤包括:
42、a.单齿啮合刚度kg表达式为:
43、
44、b.外花键的齿基刚度为:
45、
46、c.考虑齿顶倒角的齿条型刀具加工齿轮,其过渡曲线cd是长幅渐开线的等距曲线,其表达式为:
47、
48、d.花键单齿弯曲、剪切和轴向压缩刚度通过弹性力学及材料力学变形能的两种表示方式来获得,其中修正后的外花键刚度表达式为:
49、
50、
51、
52、部分刚度采用角位移进行积分,修正后的外花键刚度化简为:
53、
54、
55、
56、e.对于内花键,所有齿的几何形状都是渐开线,且其基圆小于齿顶圆,通过势能法计算内花键弯曲、剪切和轴向刚度,其中内花键刚度表达式为:
57、
58、
59、
60、3、步骤(3)中,横向刚度和转角刚度代表了抵抗横向和转角变形的能力,它们的计算方式如下:
61、
62、
63、其中δy是外花键端面耦合中心的挠度,fy是挠度δy在相应方向上对应的剪力,θz是外花键端面耦合中心的转角,mx是由于θx在相应方向上的弯矩;
64、当花键产生不对中时,x方向和y方向的刚度并不再相同,忽略交叉刚度的情况下,此时两个方向刚度的联系如下所示:
65、kx(θ)=ky(θ+90°)
66、kθx(θ)=kθy(θ+90°)。
67、本发明的优势在于:本发明基于接触理论和切片法,提出了一种考虑平行不对中的花键刚度改进方法,基于花键接触理论,提出了不对中花键啮合力平衡方程。在啮合刚度的计算中,考虑了齿基刚度,并通过去除能量的重复计算来修正轮齿刚度,解决了现有花键联轴器啮合特性分析及静力学分析技术中存在的缺少不对中故障下刚度的研究等问题。
技术特征:
1.一种考虑平行不对中的花键联轴器的横向和转角刚度的改进方法,其特征是:
2.根据权利要求1所述的一种考虑平行不对中的花键联轴器的横向和转角刚度的改进方法,其特征是:步骤(1)中,推导不对中花键啮合状态下载荷与变形的平衡方程过程为:
3.根据权利要求1所述的一种考虑平行不对中的花键联轴器的横向和转角刚度的改进方法,其特征是:步骤(2)中,计算单齿啮合刚度的步骤包括:
4.根据权利要求1所述的一种考虑平行不对中的花键联轴器的横向和转角刚度的改进方法,其特征是:步骤(3)中,横向刚度和转角刚度代表了抵抗横向和转角变形的能力,它们的计算方式如下:
技术总结
本发明的目的在于提供一种考虑平行不对中的花键联轴器的横向和转角刚度的改进方法,包括如下步骤:建立不对中花键联轴器的载荷和变形的示意图,根据不对中花键的变形几何关系,推导出不对中花键啮合状态下载荷与变形的平衡方程;根据能量法来推导单齿啮合刚度,修正轮齿啮合刚度;根据步骤(2)中得到的花键单齿啮合刚度,带入到步骤(1)中得到的啮合力平衡方程,计算出不对中花键联轴器的横向刚度和转角刚度。通过与有限元结果的比较,本发明计算结果更加高效,弥补了现阶段不对中情况下花键联轴器横向和转角刚度计算方法的空缺。
技术研发人员:赵松涛,张晓旭,汤鱼,宋铎,叶盛鉴,孙侨,王梦琪,姜雨霆
受保护的技术使用者:中国船舶重工集团公司第七0三研究所
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!