一种基于YOLOv5的轻量化零件识别定位方法
本发明涉及零件识别定位,尤其涉及一种目标检测鲁棒性高、目标识别效率高的基于yolov5的轻量化零件识别定位方法。
背景技术:
1、随着机器视觉的广泛应用与研究,零件的识别技术作为工业制造过程中的关键环节,尤其是将零件识别技术部署在工业机器人中,为了工业机器人能够更快、更准确地对目标零件进行分类,轻量化的零件识别方法成为了研究开发的主要内容。工业生产过程中由于零件的种类繁多、分类环境复杂、数量庞大、存在小目标等因素,使得零件的检测识别面临许多挑战。
2、由于深度学习技术的迅速发展,目前已有两种类型的零件目标识别方法。一种由ssd和yolo系列等组成的基于回归的单阶段(one-stage)识别算法;另一种是基于候选框的两阶段(two-stage)识别算法,如r-cnn、faster r-cnn等。工业生产制造过程中零件目标的识别算法必须同时保障精度和识别率,实际环境中小目标零件存在错检、漏检的情况,以及模型的参数量以及体积过大,从而难以部署在嵌入式平台的问题,不能满足工业生产中的高精度需求。
技术实现思路
1、发明目的:本发明的目的是提供一种目标检测鲁棒性高、目标识别效率高的基于yolov5的轻量化零件识别定位方法。
2、技术方案:本发明包括如下步骤:
3、(1)通过工业相机采集零件样本图像;
4、(2)对采集的图像样本进行数据增强,制作数据集,并分成训练集和验证集;
5、(3)构建基于轻量化yolov5的零件识别深度学习模型,载入数据集对算法模型进行训练,得到目标识别结果及预测框;
6、(4)从预测框中将目标区域从图像中截取出来,对预处理区域进行边缘提取得到目标框架,对目标框架进行特征点提取得到特征点的位置信息,并计算重心作为零件的定位点;
7、(5)基于相机标定参数和小孔成像原理,将零件重心的像素坐标转换为实际物理坐标,获得零件重心的实际坐标。
8、进一步地,所述步骤(1)将工业相机高度控制在距离桌面的30mm处,并设置相机的拍摄角度垂直于桌面,然后利用工业相机采集零件图像。
9、进一步地,所述步骤(2)包括:
10、(21)将步骤(1)中获得的样本图像通过随机翻转、裁剪,随机调整图片的色调、亮度、饱和度用来增强数据集;
11、(22)利用labelimg标注工具的yolo格式对图像处理的照片标注,按照零件的类型进行分类标注;
12、(23)将训练集按总数据集数目的80%随机进行挑选,其余20%则做测试集。
13、进一步地,所述步骤(3)包括:
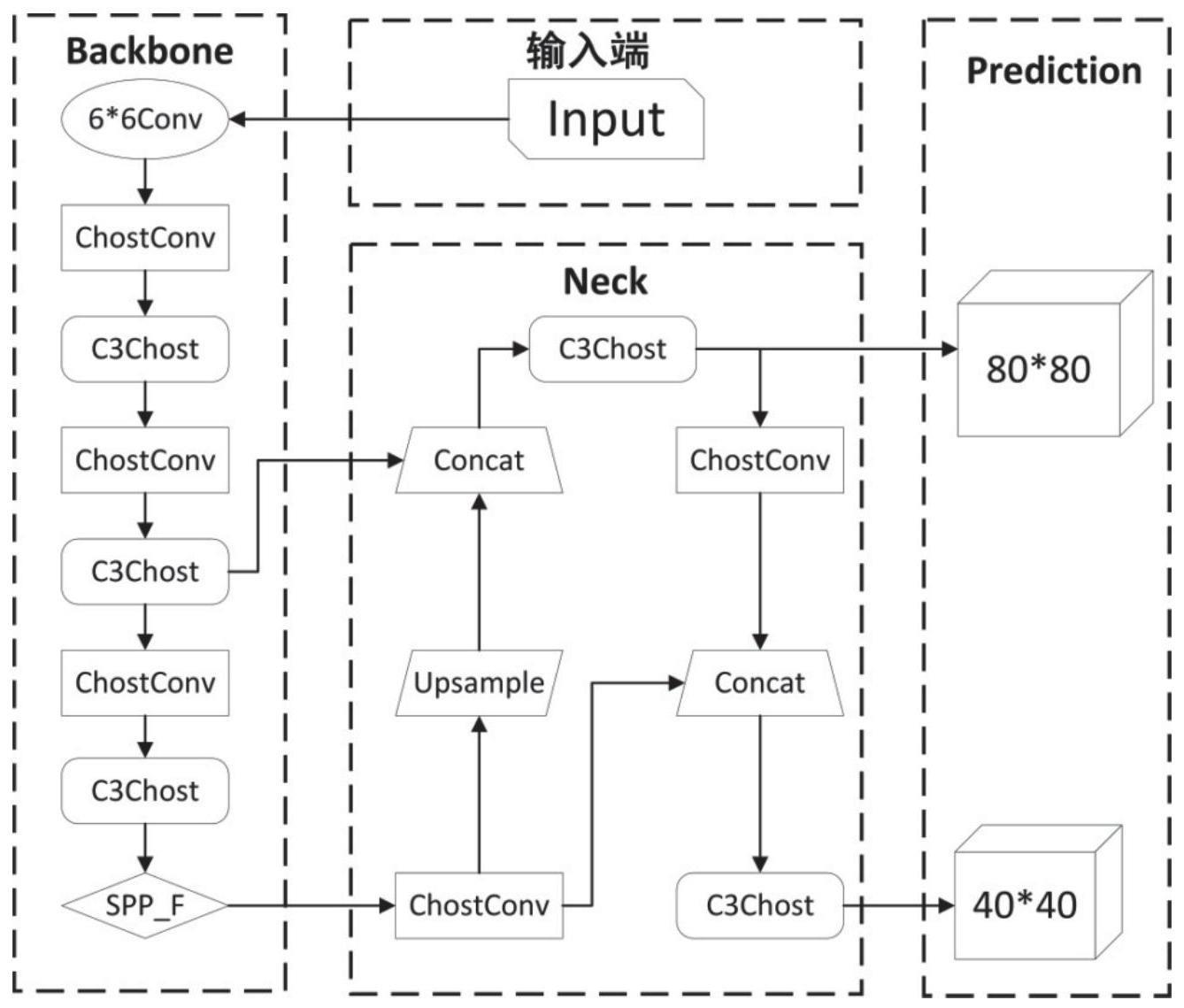
14、(31)搭建原始yolov5模型,依次将模型的输入端、主干结构、neck结构、输出端搭建出来并按照算法传播方向进行连接;
15、(32)将yolov5模型的主干网络backbone替换成ghostnet;
16、(33)构建新型特征金字塔spp f;
17、(34)去除用于大目标尺度的检测层;
18、(35)将yolov5模型中giou损失函数替换为alpha-siou损失函数;
19、(36)获得总体样本检测的平均精确度map,目标检测平均精度p、目标平均召回率r,具体公式如下:
20、
21、
22、
23、其中,tp指的是识别正确的零件数目;fn指的是未识别出的零件数目;fp指的是错误识别的零件数目;n表示零件的类别数量。
24、进一步地,所述步骤(35)包括:
25、(35-1)角度损失
26、
27、
28、
29、
30、其中,ch为真实框和预测框中心点的高度差,σ为真实框和预测框中心点的距离,为真实框中心点坐标,为预测框中心坐标;
31、(35-2)距离损失
32、
33、
34、
35、γ=2-λ
36、其中(cw,ch)为真实框与预测框最小外接矩形的宽和高;
37、(35-3)形状损失
38、
39、
40、
41、其中w,h,wgt,hgt分别为预测框和真实框的宽和高;θ控制对形状损失的关注程度,通常取[2,6];
42、(35-4)iou损失
43、
44、
45、其中,iou表示图像真实框与预测框的面积的交集与面积的并集之比,△为距离损失,ω为形状损失。
46、进一步地,所述步骤(4)包括:
47、(41)对识别的图像进行灰度处理;
48、(42)将步骤(41)处理后的图像进行高斯平滑处理;
49、(43)将步骤(42)处理后的图像进行中值滤波;
50、(44)利用canny边缘提取零件的边缘轮廓;
51、(45)计算重心。
52、有益效果:本发明与现有技术相比,具有如下显著优点:测试集中的map值达到了99.4%,precision、recall也仅比yolov5模型降低了0.1%、0.2%,但推理时间却比之前快了35%,计算量以及体积也仅是yolov5模型的35.62%、14.58%;零件识别性能大幅提升,目标检测的鲁棒性也提高了。
技术特征:
1.一种基于yolov5的轻量化零件识别定位方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的基于yolov5的轻量化零件识别定位方法,其特征在于,所述步骤(1)将工业相机高度控制在距离桌面的30mm处,并设置相机的拍摄角度垂直于桌面,然后利用工业相机采集零件图像。
3.根据权利要求1所述的基于yolov5的轻量化零件识别定位方法,其特征在于,所述步骤(2)包括:
4.根据权利要求1所述的基于yolov5的轻量化零件识别定位方法,其特征在于,所述步骤(3)包括:
5.根据权利要求1所述的基于yolov5的轻量化零件识别定位方法,其特征在于,所述步骤(35)包括:
6.根据权利要求1所述的基于yolov5的轻量化零件识别定位方法,其特征在于,所述步骤(4)包括:
技术总结
本发明公开了一种基于YOLOv5的轻量化零件识别定位方法,包括通过工业相机采集零件样本图像;对采集的图像样本进行数据增强,制作数据集,并分成训练集和验证集;构建基于轻量化YOLOv5的零件识别深度学习模型,载入数据集对算法模型进行训练,得到目标识别结果及预测框;从预测框中将目标区域从图像中截取出来,对预处理区域进行边缘提取得到目标框架,对目标框架进行特征点提取得到特征点的位置信息,并计算重心作为零件的定位点;基于相机标定参数和小孔成像原理,将零件重心的像素坐标转换为实际物理坐标,获得零件重心的实际坐标。本发明提高了目标检测的鲁棒性,大幅提高了目标识别的效率。
技术研发人员:赵礼刚,秦齐,吴爱胜
受保护的技术使用者:江苏科技大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!