基于加速度二次积分的位移采集及验证装置的制作方法
本发明涉及波浪补偿,特别涉及基于加速度二次积分的位移采集及验证装置。
背景技术:
1、随着世界对清洁能源的需求,海上风力发电机的数量日益增多,而风力发电机的安装和维护,都离不开船舶的运输。由于海浪的非线性影响,导致船舶产生横摇、纵摇、偏航、摇摆、浪涌、升沉六个自由度的运动,对海上作业造成了极大的影响。因此,需要准确测量出船舶在海浪作用下的运动,使用波浪补偿技术,将海浪引起的船舶运动抵消,才能更安全、更快捷的推进海上风力发电机的安装。
2、目前对位移的测量一般分为相对式测量和绝对式测量两种。绝对式测量在陆地等存在静止参照系的地方广为应用、技术成熟,但是相对于没有静止参考点的海面空间而言,船舶升沉位移的测量仍是工程测试的难题之一。
3、公开号为cn114997252a的发明专利公开了一种基于惯性原理的车轮多边形车载检测方法,首先获取轴箱垂向加速度信号,将其分解为多个imf分量。然后,将imf分量与原始信号组合,构建快速独立成分分析观测矩阵,计算得到相互独立的独立分量,并采用相关系数法筛选出与车轮多边形激励相关的有效信号分量。进一步地,基于惯性原理对有效信号分量进行二次积分,得到加速度积分结果,对加速度积分结果进行去趋势项处理后得到车轮径向偏差位移量。最后,定量识别车轮多边形的阶次和幅值。该专利具有高效率,高精度的特点,但是在信号源头采用imf和原始信号组合的方式,导致两处噪音信号来源,而信号中的噪音会在加速度积分时不断累积,导致加速度积分结果偏离,使得计算结果有误差。
4、公开号为cn114659618a的发明专利公开了一种基于近似积分法空间微振动测试方法及装置。该方法基于近似积分法计算加速度积分,利用加速度传感器得到的加速度信号在时域内精确积分到位移信号,通过在软件中模拟出高通滤波器与两个积分器构建连续系统来去除在积分过程中的趋势项误差所在的低频部分,形成了近似积分的效果来避免在计算过程中出现直接积分环节减少积分误差和趋势项,提升了积分精度和积分效率。由于该方法经过软件和去趋势项等环节,串行计算步骤繁琐,导致计算时间过长,积分得到位移值速度过慢,无法满足实时性的要求。
技术实现思路
1、发明目的:本发明的目的是为了解决现有技术中的不足,提供基于加速度二次积分的位移采集及验证装置。
2、技术方案:基于加速度二次积分的位移采集及验证装置,具体步骤包括:
3、s1.依次将加速度测量模块、加速度放大模块、加速度数据二次积分模块、数据接收与处理模块和验证模块进行组装;
4、s2.加速度测量模块设置有加速度传感器,船舶运动时,加速度传感器采集船舶升沉运动的模拟量信号,由于模拟量电压信号的值偏小,加速度放大模块设置有放大器,放大器将电压信号放大和滤波;
5、s3.加速度数据二次积分模块在加速度数据积分盒中对处理后的加速度数据进行积分,分别计算出对应的速度数据和位移数据;
6、s4.数据接收与处理模块将模拟量转化为数字量,在上位机软件中显示出实时波形并储存;
7、s5.验证模块设置有角度传感器,通过角度传感器来验证经过加速度二次积分后得到的位移值的准确性。
8、本发明的进一步改进在于,步骤s2中,加速度传感器为单轴加速度传感器。
9、本发明的进一步改进在于,步骤s2中,放大器根据船舶工作海况导致的船舶升沉情况选择倍数,用于避免积分时的平顶现象。
10、本发明的进一步改进在于,放大器选择倍数有0.1倍、0.5倍、1倍和10倍四个挡位。
11、本发明的进一步改进在于,步骤s3中,加速度数据二次积分模块使用时频域积分方法,首先在时域上进行积分,离散加速度数据的时域积分计算公式为式(1):
12、(1)
13、其中, 为第 次采样次数,为积分后的速度值,为加速度信号,为采样频率。
14、本发明的进一步改进在于,步骤s3中,对速度数据进行傅里叶变换得到速度数据的频域值为式(2):(2)
15、本发明的进一步改进在于,步骤s3中,进频域上进行积分为式(3):
16、 (3)
17、其中, ,为频率分辨率, 和分别为截止频率的下限和上限, 为第 次采样次数,为傅里叶分量对应的频率。
18、本发明的进一步改进在于,步骤s4中,数据接收与处理模块通过adc装置将模拟量转化为数字量,并通过三通道信号采集器将信号传输至上位机,在上位机软件中显示出实时波形并储存三通道信息,三通道分别对应加速度信号、速度信号、位移信号的数字量。
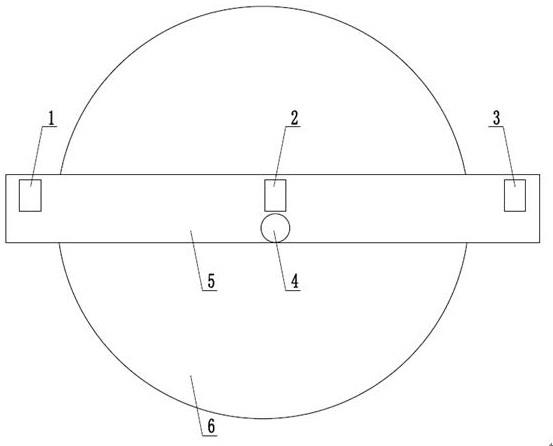
19、本发明的进一步改进在于,步骤s5中,角度传感器的数量为四个并放置于补偿平台上,四个角度传感器分别为中心角度传感器、加速度传感器一、加速度传感器二和加速度传感器三。
20、本发明的进一步改进在于,当船舶进行横摇运动时,记录加速度传感器一二次积分后测得的位移值h1、加速度传感器二二次积分后测得的位移值h2和加速度传感器三二次积分后测得的位移值h3;根据角度传感器测出的横摇角度值和传感器之间的距离,验证积分测得位移的准确性。
21、与现有技术相比,本发明提供的基于加速度二次积分的位移采集及验证装置,至少实现了如下的有益效果:
22、本发明在船舶运动时,加速度传感器采集船舶升沉运动的模拟量信号,由于模拟量电压信号的值偏小,需要经过放大器将电压信号放大和滤波,加速度数据二次积分模块在加速度数据积分盒中对处理后的加速度数据进行积分,能够分别计算出对应的速度数据和位移数据,最后将模拟量转化为数字量,在上位机软件中显示出实时波形并储存,最终通过角度传感器来验证经过加速度二次积分后的位移值的准确性,本装置使用相对式测量方法,解决了相对于没有静止参考点的海面空间而言、船舶升沉位移的测量困境,通过采集船舶运动数据可以准确测量船舶的升沉位移值,使用波浪补偿技术,将海浪引起的船舶运动抵消,安全快捷地推进海上风力发电机的安装。
技术特征:
1.基于加速度二次积分的位移采集及验证装置,其特征在于,具体步骤包括:
2.根据权利要求1所述的基于加速度二次积分的位移采集及验证装置,其特征在于,所述步骤s2中,所述加速度传感器为单轴加速度传感器。
3.根据权利要求1所述的基于加速度二次积分的位移采集及验证装置,其特征在于,所述步骤s2中,所述放大器根据船舶工作海况导致的船舶升沉情况选择倍数,用于避免积分时的平顶现象。
4.根据权利要求3所述的基于加速度二次积分的位移采集及验证装置,其特征在于,所述放大器选择倍数有0.1倍、0.5倍、1倍和10倍四个挡位。
5.根据权利要求1所述的基于加速度二次积分的位移采集及验证装置,其特征在于,所述步骤s3中,所述加速度数据二次积分模块使用时频域积分方法,首先在时域上进行积分,离散加速度数据的时域积分计算公式为式(1):
6.根据权利要求5所述的基于加速度二次积分的位移采集及验证装置,其特征在于,所述步骤s3中,对速度数据v(n)进行傅里叶变换得到速度数据的频域值v(ω)为式(2):
7.根据权利要求5所述的基于加速度二次积分的位移采集及验证装置,其特征在于,所述步骤s3中,进频域上进行积分为式(3):
8.根据权利要求1所述的基于加速度二次积分的位移采集及验证装置,其特征在于,所述步骤s4中,所述数据接收与处理模块通过adc装置将模拟量转化为数字量,并通过三通道信号采集器将信号传输至上位机,在上位机软件中显示出实时波形并储存三通道信息,三通道分别对应加速度信号、速度信号、位移信号的数字量。
9.根据权利要求1所述的基于加速度二次积分的位移采集及验证装置,其特征在于,所述步骤s5中,所述角度传感器的数量为四个并放置于补偿平台上,四个角度传感器分别为中心角度传感器、加速度传感器一、加速度传感器二和加速度传感器三。
10.根据权利要求9所述的基于加速度二次积分的位移采集及验证装置,其特征在于,当船舶进行横摇运动时,记录加速度传感器一二次积分后测得的位移值h1、加速度传感器二二次积分后测得的位移值h2和加速度传感器三二次积分后测得的位移值h3;根据角度传感器测出的横摇角度值和传感器之间的距离,验证积分测得位移的准确性。
技术总结
本发明公开了一种基于加速度二次积分的位移采集及验证装置,具体步骤包括:S1.将加速度测量模块、加速度放大模块、加速度数据二次积分模块、数据接收与处理模块和验证模块组装;S2.加速度传感器采集船舶升沉运动的模拟量信号,由于模拟量电压信号的值偏小,加速度放大模块设置有放大器,放大器将电压信号放大和滤波;S3.对处理后的加速度数据进行积分,分别计算出对应的速度数据和位移数据;S4.数据接收与处理模块将模拟量转化为数字量,在上位机软件中显示出实时波形并储存;S5.验证经过加速度二次积分后得到的位移值的准确性,本发明基于加速度传感器的测量方法能够准确测量船舶的升沉位移值,安全快捷。
技术研发人员:韩重阳,胡雄,吴文婷
受保护的技术使用者:江苏恒赛海洋科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!