一种基于显著锚点几何嵌入的点云配准方法
本发明属于点云数据处理,具体涉及一种基于显著锚点几何嵌入的点云配准方法。
背景技术:
1、点云配准在图形学中扮演着重要的角色,它是许多任务的前提和基础,它广泛应用于场景重建、自动驾驶和同时定位与制图等领域。他的主要目的是求解一个变换矩阵将两个处于不同坐标系下的点云,对齐至同一个坐标系下。配准通常采取基于对应关系的点云配准和直接配准方法。基于对应关系的方法包括特征提取,关键点检测,离群值去除和姿态估计。最先提出了用于3维分类和分割的点集的深度学习等工作的网络以及度量空间中点集上的深度分层特征学习的网络,虽然为点云的特征提取提供了参考,但是这两项工作没有考虑点云的几何结构特征。后来又提出了三维点鲁棒匹配的全局上下文感知局部特征,点对特征与最先提出的网络相结合提高了特征对噪音的鲁棒性。之后提出的点对特征-折叠网在此基础上将折叠网整合进框架并利用无监督的方法获取特征。后来又出现了3维特征网利用一个弱监督的深度网络解决点云数据精确标注困难的问题,提高特征质量。接着又有人提出了三维平滑网,该网络利用孪生网络架构编码平滑密度值。然后边卷积操作横空出世,并因此构建了动态图形卷积神经网络捕获点之间的拓扑信息。后来出现的核点卷积来模拟二维卷积中的操作能够更好的捕获局部几何信息。此后又有人提出的自旋网通过估计的参考轴限制z轴自由度,利用球形体素化消除xy平面旋转自由度提取高鲁棒性的特征。直接配准方法采用二维图像算法将点网得到的相对位姿和逆合成公式计算雅可比矩阵,最后用一个可微的卢卡斯和卡纳德算法计算刚性变换。后又出现了在迭代过程中预测源点云和目标点云的重叠掩码的网络,通过多层感知机从两者的全局特征中预测刚性变换。
2、综上,传统的点云配准方法包括提取点特征,然后在特征空间中寻找另一帧中的最近点作为对应点,接着过滤掉外点保留内点,最终利用一个鲁棒性评估器计算变换矩阵。这类方法通常会引入均匀采样或者关键点检测这类稀疏性方法。相较于均匀采样,关键点检测在稀疏点云时会考虑点的几何特征的显著性,从而减少匹配的模糊性。然而,稀疏性会对采样点的可重复性提出要求,当两点云间的重叠区域较小时,这将会进一步加深匹配的错误率。综上所述,现有的点云匹配算法存在匹配度低的问题。
技术实现思路
1、为解决以上现有技术存在的问题,本发明提出了一种基于显著锚点几何嵌入的点云配准方法,该方法包括:获取获取相同场景下不同视角的两个点云;将两个点云数据输入到训练好的点云配准模型中,得到点云配准结果;
2、对点云配准模型进行训练的过程包括:
3、s1、获取训练数据集,该数据集中每个数据包括相同场景下不同视角的两个点云;
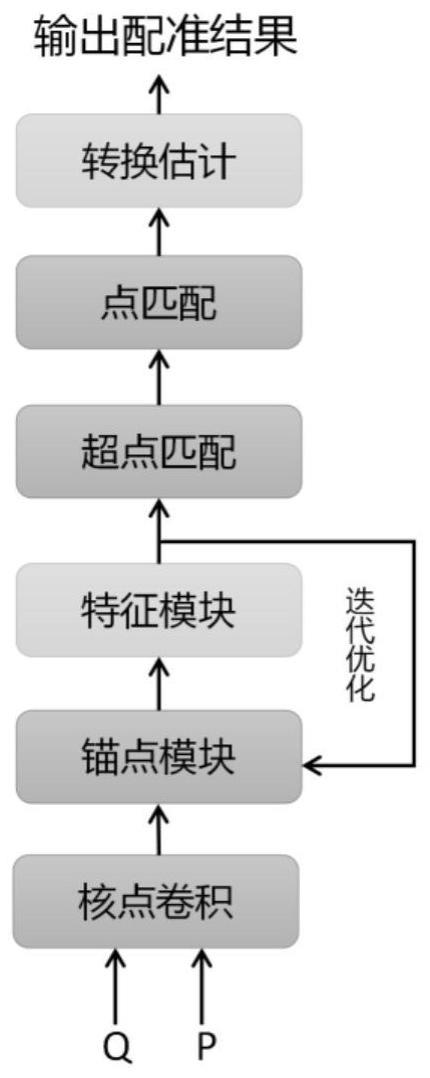
4、s2、将训练集中的两个不同视角的点云进行核点卷积,得到两个点云的超点特征;
5、s3、将超点特征输入到锚点模块中进行锚点对应查找,得到锚点对应点;将查找到的锚点对应点输入到特征模块中进行特征提取;采用迭代法对锚点对应点和提取的锚点对应点特征进行优化,得到最优特征;
6、s4、根据最优特征计算超点的匹配,通过超点匹配在对应区域中查找匹配的全局对应点;
7、s5、计算各个区域的变换,根据全局对应点选择最优变换;
8、s6、对最优点云进行转换估计,得到估计结果;
9、s7、根据估计结果计算模型的损失函数,当损失函数收敛时完成模型的训练。
10、优选的,对两个不同视角的点云进行核点卷积计算的过程包括:
11、
12、nx={xi∈p|‖xi-x‖≤r}
13、其中,xi为p点云中的点,fi为第i个点云对应的特征,f表示点的特征,g(.)表示核函数,nx表示在xi的r半径内选取临近点x。
14、优选的,采用锚点模块和特征模块对输入特征进行处理的过程包括:将核点卷积得到的超点特征输入锚点模块,采用nms方法选择多个高质信度匹配作为锚点对应,具体步骤包括:
15、步骤1、从所有的对应关系中选出候选对应关系;
16、步骤2、计算所有候选对应关系的分数;
17、步骤3、根据分数的大小对候选对应关系进行排序,并选出最高分数所对应的候选对应关系;
18、步骤4、设置阈值,计算最高分数所对应的候选对应关系与其它对应关系的距离,并将计算出的距离与设置的阈值进行对比,删除小于阈值的对应关系,重复步骤4,直到候选对应关系筛选完成;
19、步骤5、将对应关系输入特征模块,引入结构嵌入分支,融入自身全局上下文信息同时嵌入点对距离,充分交流两点云的结构信息、增强特征的差异性,得到更好的特征。
20、进一步的,特征模块对输入的对应关系进行处理的过程包括:特征模块包括自注意模块和几何交流模块;选取一定量的对应关系建立点云之间的联系,将对应关系输入特征模块;采用自注意模块加强点云内部地交互,引入结构嵌入分支能够使得自注意模块具备拓扑结构编码功能;采用几何交流模块加强两个点云之间的交互,最后输出增强的特征。
21、优选的,将最优超点点云与目标点云进行匹配的过程包括:利用解码器模块解码超点特征;将解码器的最后一层将输出的分辨率恢复到各自点云的原始分辨率,同时获得源点云和目标点云的点的特征;对于每个点将按照最近匹配的方式将其分配给超点完成区域的划分;根据区域匹配结果在相应区域中利用sinkhorn算法完成点匹配,获得该区域匹配的点匹配集。
22、本发明的有益效果
23、本发明将建立了锚点对应的点云间的联系,以此为桥梁可以利用几何交流模块充分交流两点云的信息;嵌入点与锚点的距离特征,能够有效检测区域在全局拓扑结构上的差异,从而减少低重叠率下非重叠相似区域的匹配,进而提高区域匹配的准确度;一方面考虑到点云具有明显的几何结构,可以通过几何嵌入的方式对点云的上下文结构信息进行编码,增加点特征之间的差异性,以减少相似区域间的误匹配;另一方面,在低重叠率的情况下,充分交换点云间的信息是区分相似非对齐区域的关键。
技术特征:
1.一种基于显著锚点几何嵌入的点云配准方法,其特征在于,包括:获取获取相同场景下不同视角的两个点云;将两个点云数据输入到训练好的点云配准模型中,得到点云配准结果;
2.根据权利要求1所述的一种基于显著锚点几何嵌入的点云配准方法,其特征在于,对两个不同视角的点云进行核点卷积计算的公式包括:
3.根据权利要求1所述的一种基于显著锚点几何嵌入的点云配准方法,其特征在于,采用锚点模块和特征模块对输入特征进行处理的过程包括:将核点卷积得到的超点特征输入锚点模块,采用nms方法选择多个高质信度匹配作为锚点对应,具体步骤包括:
4.根据权利要求3所述的一种基于显著锚点几何嵌入的点云配准方法,其特征在于,特征模块对输入的对应关系进行处理的过程包括:特征模块包括自注意模块和几何交流模块;选取一定量的对应关系建立点云之间的联系,将对应关系输入特征模块;采用自注意模块加强点云内部地交互,引入结构嵌入分支能够使得自注意模块具备拓扑结构编码功能;采用几何交流模块加强两个点云之间的交互,最后输出增强的特征。
5.根据权利要求4所述的一种基于显著锚点几何嵌入的点云配准方法,其特征在于,特征模块中自注意模块的计算注意力分数的公式为:
6.根据权利要求4所述的一种基于显著锚点几何嵌入的点云配准方法,其特征在于,特征模块中几何交流模块的权重计算公式为:
7.根据权利要求1所述的一种基于显著锚点几何嵌入的点云配准方法,其特征在于,将最优超点点云与目标点云进行匹配的过程包括:利用解码器模块解码超点特征;将解码器的最后一层将输出的分辨率恢复到各自点云的原始分辨率,同时获得源点云和目标点云的点的特征;对于每个点将按照最近匹配的方式将其分配给超点完成区域的划分;根据区域匹配结果在相应区域中利用sinkhorn算法完成点匹配,获得该区域匹配的点匹配集。
8.根据权利要求1所述的一种基于显著锚点几何嵌入的点云配准方法,其特征在于,对最优点云进行转换估计的公式为:
9.根据权利要求1所述的一种基于显著锚点几何嵌入的点云配准方法,其特征在于,模型的损失函数为:
技术总结
本发明属于点云数据处理技术领域,具体涉及一种基于显著锚点几何嵌入的点云配准方法,包括:获取获取相同场景下不同视角的两个点云;对两个点云数据进行核点卷积,将卷积后的特征输入到锚点模块和特征模块进行特征提取和优化,得到最优特征;计算最优特征的超点匹配,并查找全局对应点;计算各个区域的变换,根据全局对应点选择最优变换;对最优点云进行转换估计,得到估计结果;本发明将建立了锚点对应的点云间的联系,以此为桥梁可以利用几何交流模块充分交流两点云的信息;嵌入点与锚点的距离特征,能够有效检测区域在全局拓扑结构上的差异,从而减少低重叠率下非重叠相似区域的匹配,进而提高区域匹配的准确度。
技术研发人员:徐宗懿,高瑞,高鑫雨,高新波
受保护的技术使用者:重庆邮电大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!