一种高清地图车道线自动生产方法、装置及计算机介质与流程
本发明涉及无人驾驶,具体提供一种高清地图车道线自动生产方法、装置及计算机介质。
背景技术:
1、高精度电子地图是无人驾驶核心技术之一,它包含了无人车需要能够识别的厘米级道路三维表征信息,使无人驾驶系统能够识别道路车道标示线,道路路面几何结构,以及车道前行导向和道路控制信号位置,甚至道路周边环境等。这些要素大大地提升了无人车感知周围环境的能力,为无人驾驶提供高精准的决策规划信息,所以高精地图数据准确性对于无人驾驶来说是非常重要的。
2、在无人车落地过程中,数以千万计的道路测绘,大量的人力标注,人工纠错,往往需要耗费制图企业极高的成本,不利于无人驾驶的发展。如何能够提供一种基于视觉的车道线自动生成方法,能够短时间内,快速应用到无人车的自动驾驶中,是很有必要的。
技术实现思路
1、本发明是针对上述现有技术的不足,提供一种实用性强的高清地图车道线自动生产方法。
2、本发明进一步的技术任务是提供一种设计合理,安全适用的高清地图车道线自动生产装置。
3、本发明进一步的技术任务是提供一种计算机可读介质。
4、本发明解决其技术问题所采用的技术方案是:
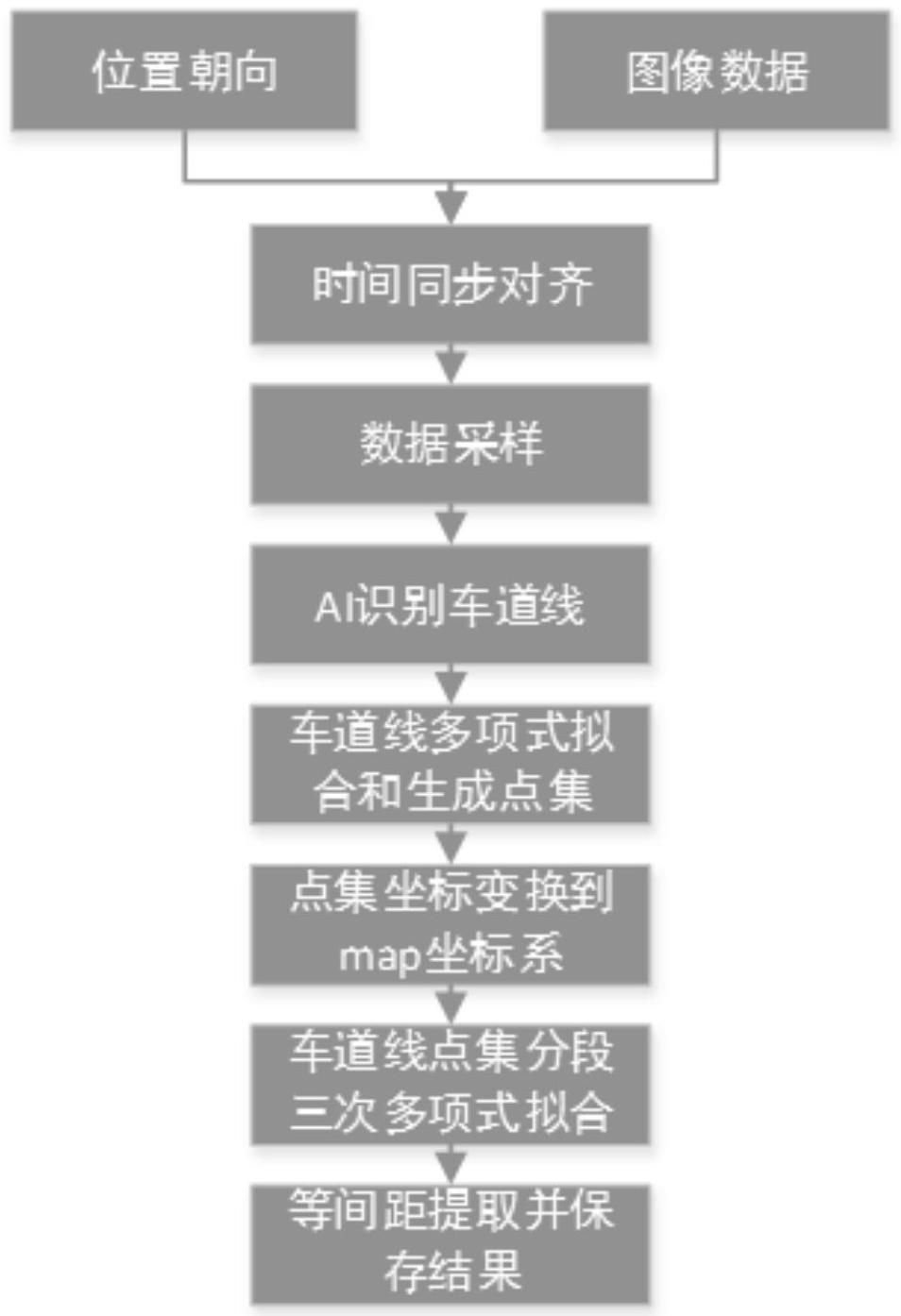
5、一种高清地图车道线自动生产方法,具有如下步骤:
6、s1、获取服务机器人在map坐标系下基于时间序列的当前时刻的位置和姿态的信息,并采集前向相机的时间序列当前时刻包含车道线的数据;
7、s2、通过时间戳对当前时刻获取的map坐标系下当前机器人的位置和姿态和同一时刻的相机帧图像进行同步;
8、s3、获取固定时间间隔的位置姿态信息和相机数据;
9、s4、采用深度学习ai分割算法对图像进行车道线分割;
10、s5、对分割后的每条车道线区域进行多项式拟合及间隔采样生成点集;
11、s6、把每条车道线采样点集转换到map地图坐标系;
12、s7、把上述map地图坐标系下的车道线点集进行分段三次多项式拟合;
13、s8、最后等间距提取点集转化为高精地图中车道线格式并保存结果。
14、进一步的,在步骤s5中,对分割后的每条车道线区域进行多项式拟合及间隔采样生成点集,把生成的每条车道线进行三次多项式拟合,通过最小二乘法求得多项式函数系数。
15、进一步的,采用的拟合函数如下:
16、y=ax3+bx2+cx+d (1)
17、通过最小二乘法法对参数a,b,c,d进行估计,得到拟合函数,其中最小二乘法可以表示为:
18、mun=∑(yi-f(xi))2 (2)
19、s.t.f(xi)=ax3+bx2+cx+d (3)
20、并对多点拟合的曲线进行固定间隔的采样。
21、进一步的,在步骤s6中,世界坐标系经过刚性变换变换到摄像机坐标系,摄像机坐标系经过透视变换转换到图像坐标系,图像坐标系经过二次变换,转到像素坐标系,涉及到以下四个坐标系:
22、ow-xwywzw:世界坐标系,描述相机位置,单位米;
23、oc-xcyczc:相机坐标系,光心为原点,单位米;
24、o-xy:图像坐标系,光心为图像中点单位毫米;
25、uv:像素坐标系,原点为图像左上角,单位像素;
26、p:世界坐标系中的一点,即为生活中真实的一点;
27、p:点p在图像中的成像点,在图像坐标系中的坐标为(x,y),在像素坐标系中的坐标为(u.v);
28、f:相机焦距,等于o与oc的距离,f=||o-oc||图像坐标系的单位毫米,属于物理单位,而像素坐标系的单位是像素。
29、进一步的,世界坐标系一点经过四种变换的公式如下:
30、
31、此处dx和dy表示每一列和每一行分别代表多少毫米,即1像素等于dx毫米;进一步上述公式可以表示为:
32、
33、设:
34、
35、其中,k1为相机内参,k2为相机外参,公式(5)可进一步简化为:
36、
37、进一步:
38、
39、其中r,k,t均为已知值,将等式中的变量做以下改写,方便描述:
40、m2=r-1t (10)
41、则:
42、zw=zc*m1(2,0)-m2(2,0) (11)
43、zc=(zw+m2(2,0))/m1(2,0) (12)
44、目标物体在地面则zw=0;如果目标物体有一定高度,则zw=实际物体高度,求出zc后即可根据像素坐标求得世界坐标。
45、进一步的,在步骤s8中,对拟合后的车道线先进行固定间隔采样,对点集端点部分做平滑处理,最后生成了每条车道线等间隔的点集,然后根据点集转化为lanelet2格式的车道线结构进行保存。
46、一种高清地图车道线自动生产装置,包括:至少一个存储器和至少一个处理器;
47、所述至少一个存储器,用于存储机器可读程序;
48、所述至少一个处理器,用于调用所述机器可读程序,执行一种高清地图车道线自动生产方法。
49、一种计算机可读介质,所述计算机可读介质上存储有计算机指令,所述计算机指令在被处理器执行时,使所述处理器执行一种高清地图车道线自动生产方法。
50、本发明的一种高清地图车道线自动生产方法、装置及计算机介质和现有技术相比,具有以下突出的有益效果:
51、本发明降低了制作高精度地图的车道线复杂性,并避免了传统高精度地图制作需要的大量的人力消耗以及错误率高的问题。
技术特征:
1.一种高清地图车道线自动生产方法,其特征在于,具有如下步骤:
2.根据权利要求1所述的一种高清地图车道线自动生产方法,其特征在于,在步骤s5中,对分割后的每条车道线区域进行多项式拟合及间隔采样生成点集,把生成的每条车道线进行三次多项式拟合,通过最小二乘法求得多项式函数系数。
3.根据权利要求2所述的一种高清地图车道线自动生产方法,其特征在于,采用的拟合函数如下:
4.根据权利要求3所述的一种高清地图车道线自动生产方法,其特征在于,在步骤s6中,世界坐标系经过刚性变换变换到摄像机坐标系,摄像机坐标系经过透视变换转换到图像坐标系,图像坐标系经过二次变换,转到像素坐标系,涉及到以下四个坐标系:
5.根据权利要求4所述的一种高清地图车道线自动生产方法,其特征在于,世界坐标系一点经过四种变换的公式如下:
6.根据权利要求5所述的一种高清地图车道线自动生产方法,其特征在于,在步骤s8中,对拟合后的车道线先进行固定间隔采样,对点集端点部分做平滑处理,最后生成了每条车道线等间隔的点集,然后根据点集转化为lanelet2格式的车道线结构进行保存。
7.一种高清地图车道线自动生产装置,其特征在于,包括:至少一个存储器和至少一个处理器;
8.一种计算机可读介质,其特征在于,所述计算机可读介质上存储有计算机指令,所述计算机指令在被处理器执行时,使所述处理器执行权利要求1至6任一所述的方法。
技术总结
本发明涉及无人驾驶技术领域,具体提供了一种高清地图车道线自动生产方法,具有如下步骤:S1、获取服务机器人在map坐标系下当前时刻的位置和姿态的信息,采集车道线的数据;S2、对获取的map坐标系下当前机器人的位置和姿态和相机帧图像进行同步;S3、获取位置姿态信息和相机数据;S4、进行车道线分割;S5、对每条车道线区域进行多项式拟合及间隔采样生成点集;S6、把每条车道线采样点集转换到map地图坐标系;S7、把map地图坐标系下的车道线点集进行分段三次多项式拟合;S8、最后等间距提取点集转化为高精地图中车道线格式并保存结果。与现有技术相比,本发明降低了制作高精度地图的车道线复杂性,并避免了需要的大量的人力消耗以及错误率高的问题。
技术研发人员:王本强,谢超,王健,张猛,马辰
受保护的技术使用者:山东新一代信息产业技术研究院有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!