信息处理装置、信息处理方法、存储介质以及经训练模型与流程
本公开涉及信息处理装置、信息处理方法、存储介质以及经训练模型。
背景技术:
1、日本专利第4523501号(jp 4523501 b)公开了建议能够提供期望的工具动作的合适的替代工具的技术。
技术实现思路
1、然而,在现有技术中,例如,存在与期望的工具形状等不同的工具不能被提议作为替代工具的情况。
2、本公开的目的在于提供能够估计合适的替代工具的技术。
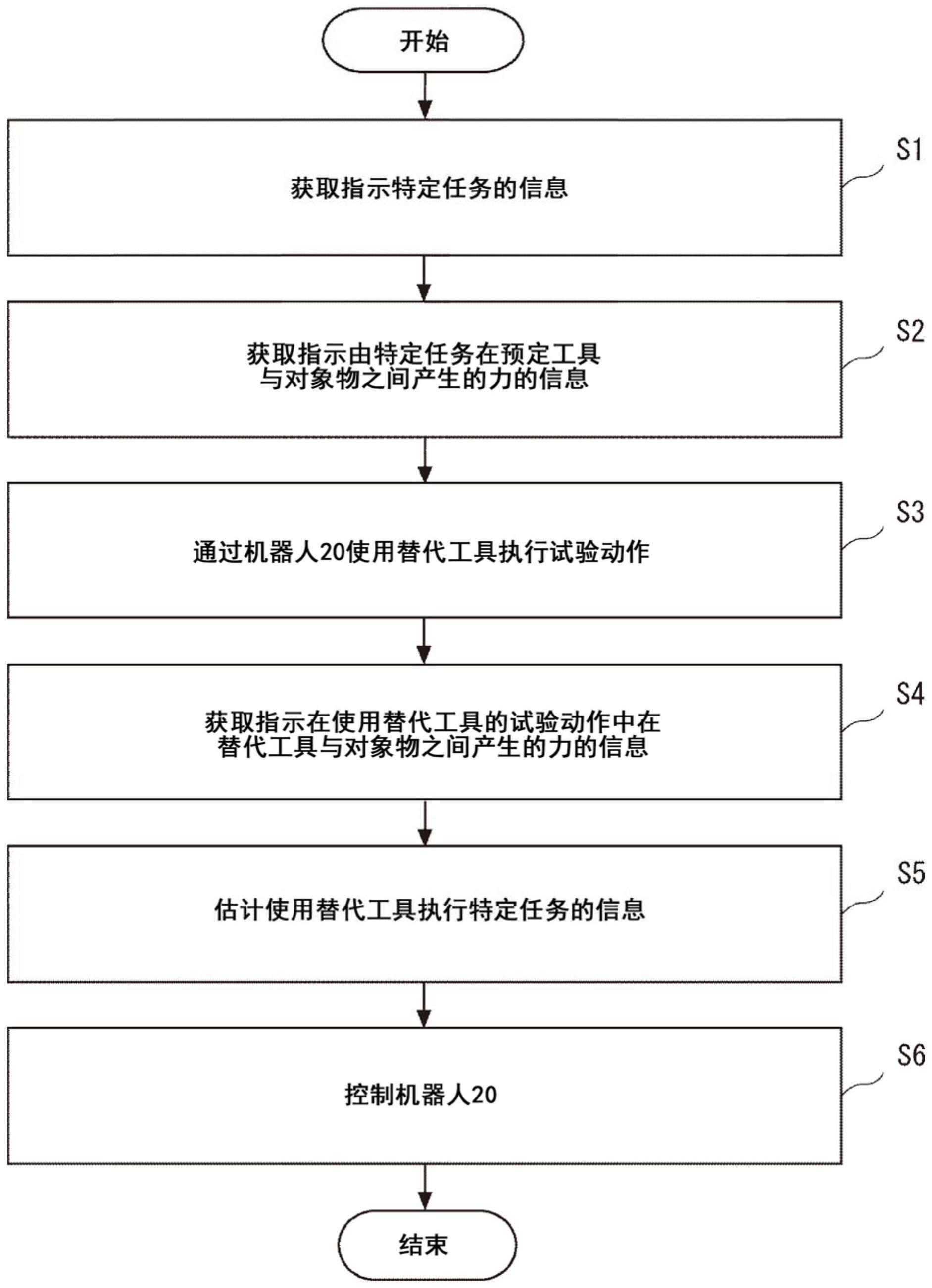
3、本公开的第一方案提供一种信息处理装置,其包括:获取单元,其获取信息,所述信息指示在由机器人使用第一工具的试验动作中在所述第一工具与对象物之间产生的力;以及估计单元,其基于由所述获取单元获取的所述信息以及指示在使用特定工具的特定任务中在所述特定工具与所述对象物之间产生的力的信息,估计使用所述第一工具执行所述特定任务的信息。
4、本公开的第二方案提供一种信息处理方法,其包括:获取信息,所述信息指示在由机器人使用第一工具的试验动作中在所述第一工具与对象物之间产生的力;以及基于获取的所述信息以及指示在使用特定工具的特定任务中在所述特定工具与所述对象物之间产生的力的信息,估计使用所述第一工具执行所述特定任务的信息。
5、本公开的第三方案提供一种存储介质,其存储使计算机执行处理的程序,所述处理包括:获取信息,所述信息指示在由机器人使用第一工具的试验动作中在所述第一工具与对象物之间产生的力;以及基于获取的所述信息以及指示在使用特定工具的特定任务中在所述特定工具与所述对象物之间产生的力的信息,估计使用所述第一工具执行所述特定任务的信息。
6、本公开的第四方案提供一种经训练模型,其用于使计算机执行如下处理:基于指示在由机器人使用第一工具的试验动作中在所述第一工具与对象物之间产生的力的信息,以及指示在使用特定工具的特定任务中在所述特定工具与所述对象物之间产生的力的信息,估计使用所述第一工具执行所述特定任务的信息。
7、根据一个方案,能够估计合适的替代工具。
技术特征:
1.一种信息处理装置,其包括:
2.根据权利要求1所述的信息处理装置,其中,所述获取单元获取指示在所述试验动作中在所述第一工具与所述对象物之间产生的所述力的所述信息,所述试验动作为小于所述机器人使用所述特定工具执行所述特定任务时的动作的动作。
3.根据权利要求1或2所述的信息处理装置,其中,使用所述第一工具执行所述特定任务的所述信息包括指示相似度的信息,所述相似度为指示在使用所述特定工具的所述特定任务中在所述特定工具与所述对象物之间产生的所述力的所述信息,与指示在使用所述第一工具的所述试验动作中在所述第一工具与所述对象物之间产生的所述力的所述信息之间的相似度。
4.根据权利要求1或2所述的信息处理装置,其中:
5.一种信息处理方法,其包括:
6.一种存储介质,其存储使计算机执行处理的程序,所述处理包括:
7.一种经训练模型,其用于使计算机执行如下处理:基于指示在由机器人使用第一工具的试验动作中在所述第一工具与对象物之间产生的力的信息,以及指示在使用特定工具的特定任务中在所述特定工具与所述对象物之间产生的力的信息,估计使用所述第一工具执行所述特定任务的信息。
技术总结
本公开提供信息处理装置、信息处理方法、存储介质以及经训练模型。所述信息处理装置设置为包括:获取单元,其获取信息,所述信息指示在由机器人使用第一工具的试验动作中在所述第一工具与对象物之间产生的力;以及估计单元,其基于由所述获取单元获取的所述信息以及指示在使用特定工具的特定任务中在所述特定工具与所述对象物之间产生的力的信息,估计使用所述第一工具执行所述特定任务的信息。
技术研发人员:石田裕太郎,高桥太郎,美马直生
受保护的技术使用者:丰田自动车株式会社
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!