一种点云检测方法及系统与流程
本申请涉及激光点云领域,具体涉及一种点云检测方法及系统。
背景技术:
1、激光点云是一种直观、灵活和存储效率高的三维数据表示方法,在三维视觉中已变得不可或缺。大规模激光雷达数据集的出现和端到端3d表示学习的巨大进步推动了基于点云的分割、生成和检测任务的发展。所以,激光点云数据的学习和处理对于促进机器理解3d世界非常重要,有利于促进许多重要的现实世界应用的开发,如自主驾驶技术。
2、激光雷达相比传统视觉摄像头能够感知出更多的结构信息和距离信息,并且受光照的影响比较小,因此激光雷达在无人驾驶车辆上快速普及。基于此种趋势,涌现了非常多的基于激光点云的目标检测算法。通常,3d探测器分为两类,单阶段检测网络直接从输入中学习的特征回归边界框和置信度;两阶段检测网络在第二阶段使用区域建议对齐特征来优化第一阶段预测。所以,两阶段检测网络由于增加第二级对第一级的检测框进行更精确的修正而获得更高的精度,而单阶段检测网络由于网络结构更简单,通常运行得更快,更能够满足无人驾驶等实际场景中的实时性要求。
3、目标检测中检测精度受定位精度或回归框质量影响较大,在室外激光点云检测任务中,目标物体会存在被遮挡的情况,依据激光点云的生成方式,这种遮挡会使物体的点云表示没有明确的边界,从而在训练时难以确定回归框的尺度,缓解这种问题的一种方法是知识蒸馏。早期的知识蒸馏方法通常是训练学生网络模仿教师网络预测的分类概率分布,在目标检测网络模型中的知识蒸馏方法通常分为三类:应用于分类监督标签的logit蒸馏方法,但是之前的相关学者指出,用于分类的原始logit蒸馏技术效率低,只能传递语义知识;应用于特征层中基于不同的分割区域来提取中间特征,自适应的对齐教师网络和学生网络的特征图,但是检测任务中大量的背景样本正负样本不均衡使得特征蒸馏缺陷明显;将教师网络模型预测的边界框作为额外的回归目标的“伪回归框”蒸馏方法。目前应用于目标检测的蒸馏方法都是基二维图像来设计的,不适合直接运用到激光点云目标检测中。
技术实现思路
1、为了满足自动驾驶等任务的高精度和高效率的需求,本申请设计了单阶段检测网络以解决基于激光点云的三维检测任务。
2、为了实现上述目的,本申请提供了一种点云检测方法,步骤包括:
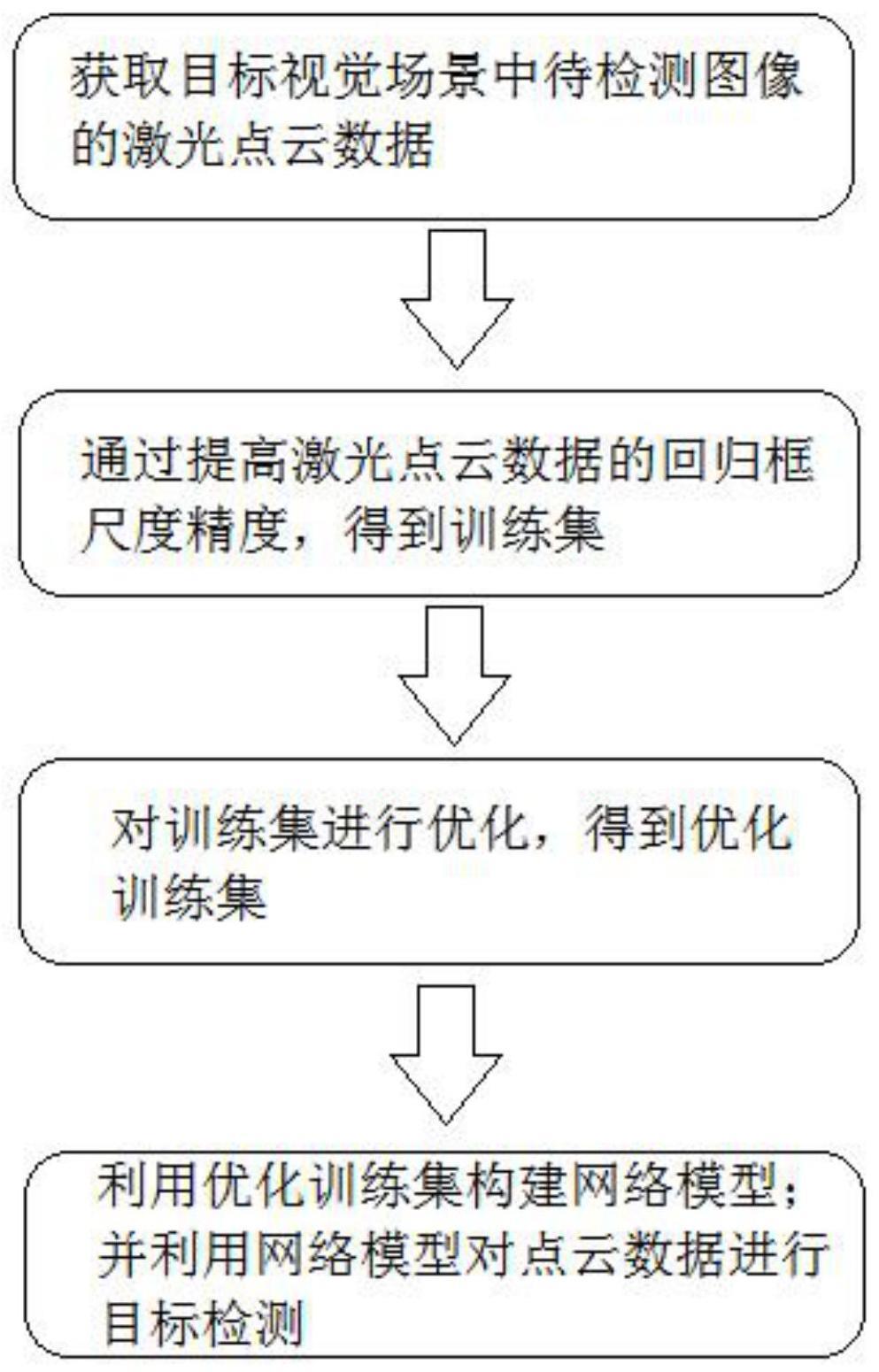
3、获取目标视觉场景中待检测图像的激光点云数据;
4、通过提高所述激光点云数据的回归框尺度精度,得到训练集;
5、对所述训练集进行优化,得到优化训练集;
6、利用所述优化训练集构建网络模型;利用所述网络模型对点云数据进行目标检测。
7、优选的,得到所述训练集的方法包括:构建知识蒸馏网络;所述知识蒸馏网络包括:教师检测网络和学生检测网络;所述教师检测网络和所述学生检测网络拥有相同的点云编码和特征提取结构。
8、优选的,利用所述知识蒸馏网络得到所述训练集的方法包括:
9、对所述尺度精度进行连续值离散化后做概率拟合;
10、为所述学生检测网络增加约束;
11、利用增加约束后的所述学生检测网络对所述回归框进行蒸馏,得到所述训练集。
12、优选的,对所述回归框进行蒸馏的方法包括:
13、对正样本回归框的尺度进行处理,并记录每条边的数据;
14、设定所述特征提取的回归框尺寸,并分别由所述教师检测网络和所述学生检测网表示;
15、将所述教师检测网络和所述学生检测网络转换为概率表示;
16、通过对所述概率进行蒸馏损失评价,得到评价结果;
17、根据所述数据和所述评价结果完成对所述回归框的蒸馏。
18、优选的,得到所述优化训练集的方法包括:设计定位引导分类项来对正样本监督标签进行权重引导,得到所述优化训练集。
19、优选的,进行所述权重引导的方法包括:
20、将正样本对应的预测边界框与真实边界框在bev空间中的iou值作为分类引导权重去抑制相对高质量正样本和相对低质量正样本和分类置信度之间的偏差,引入定位引导项g:
21、
22、其中,目标监督值:
23、
24、式中,g表示定位引导分类项、其中i表示预测边界框和真实边界框的iou值、pos表示正样本、bev表示在bev空间中边界框的维度表示、regpred表示预测的回归框偏差值、anchor表示先验框、bboxperd表示预测回归框、表示one-hot向量表示的真实标签、f表示引入定位引导项的softlabel表示形式的正样本真实标签。
25、本申请还提供了一种点云检测系统,包括:获取模块、蒸馏模块、优化模块和构建模块;
26、所述获取模块用于获取目标视觉场景中待检测图像的激光点云数据;
27、所述蒸馏模块用于通过提高所述激光点云数据的回归框尺度精度,得到训练集;
28、所述优化模块用于对所述训练集进行优化,得到优化训练集;
29、所述构建模块利用所述优化训练集构建网络模型;并利用所述网络模型对点云数据进行目标检测。
30、优选的,所述蒸馏模块包括:教师单元和学生单元;
31、所述教师单元用于提供网络参数;
32、所述学生单元用于基于所述网络参数,完成蒸馏,得到所述训练集。
33、与现有技术相比,本申请的有益效果如下:
34、本申请可以有效缓解遮挡带来的物体边界不确定性,提升被遮挡物体的检测精度;同时本申请还设计定位引导分类项,来引导相对高质量正样本和相对低质量正样本的监督标签权重进而缓解相对高质量正样本或相对低质量正样本和分类置信度之间的偏差,提高检测准确性。
技术特征:
1.一种点云检测方法,其特征在于,步骤包括:
2.根据权利要求1所述的点云检测方法,其特征在于,得到所述训练集的方法包括:构建知识蒸馏网络;所述知识蒸馏网络包括:教师检测网络和学生检测网络;所述教师检测网络和所述学生检测网络拥有相同的点云编码和特征提取结构。
3.根据权利要求2所述的点云检测方法,其特征在于,利用所述知识蒸馏网络得到所述训练集的方法包括:
4.根据权利要求3所述的点云检测方法,其特征在于,对所述回归框进行蒸馏的方法包括:
5.根据权利要求2所述的点云检测方法,其特征在于,得到所述优化训练集的方法包括:设计定位引导分类项来对正样本监督标签进行权重引导,得到所述优化训练集。
6.根据权利要求5所述的点云检测方法,其特征在于,进行所述权重引导的方法包括:
7.一种点云检测系统,其特征在于,包括:获取模块、蒸馏模块、优化模块和构建模块;
8.根据权利要求7所述的点云检测系统,其特征在于,所述蒸馏模块包括:教师单元和学生单元;
技术总结
本申请公开了一种点云检测方法及系统,其中方法包括:获取目标视觉场景中待检测图像的激光点云数据;通过提高激光点云数据的回归框尺度精度,得到训练集;对训练集进行优化,得到优化训练集;利用优化训练集构建网络模型;并利用网络模型对点云数据进行目标检测。本申请可以有效缓解遮挡带来的物体边界不确定性,提升被遮挡物体的检测精度;同时本申请还设计定位引导分类项,来引导相对高质量正样本和相对低质量正样本的监督标签权重进而缓解相对高质量正样本或相对低质量正样本和分类置信度之间的偏差,提高检测准确性。
技术研发人员:郭杰龙,魏宪,俞辉,邵东恒,张剑锋,李杰
受保护的技术使用者:泉州装备制造研究所
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!