一种基于轮廓边缘的管道表面图像展平方法及系统
本发明涉及图像矫正领域,尤其涉及一种基于轮廓边缘的管道表面图像展平方法及系统。
背景技术:
1、管道在石油化工、城市给排水、地下管廊等众多领域有着广泛应用,常被用于实现气体或者液体的传送。尤其对于进行远距离传送的长输管道,为了降低铺设和维护成本,常常采用架空敷设的施工方式。为了避免违法作业、自然灾害等原因造成传输介质泄漏,往往需要工作人员定期对管道开展巡检任务,以保证其完整性。目前,管道检测方式主要分为内壁检测方式和外壁检测方式。
2、目前,针对管道外壁的检测方式主要采用人工巡检的方式进行,或者直接利用算法对管道图像进行处理以完成检测。由于一般相机的成像过程存在较为严重的透视投影效果,因此造成图像中管道的中心区域单位面积的有效像素占比较大,而越接近管道边缘的地方,单位面积的有效像素占比就越少,即直接获取的管道表面图像并不能有效反映管道表面的纹理特征,这将不利于管道外壁缺陷的人工巡检或者算法自动检测。
技术实现思路
1、为了解决上述技术问题,本发明的目的是提供一种基于轮廓边缘的管道表面图像展平方法及系统,能够有效反映管道表面的纹理特征,以方便管道巡检人员或计算机完成管道表面异常的观察、检测和识别。
2、本发明所采用的第一技术方案是:一种基于轮廓边缘的管道表面图像展平方法,包括以下步骤:
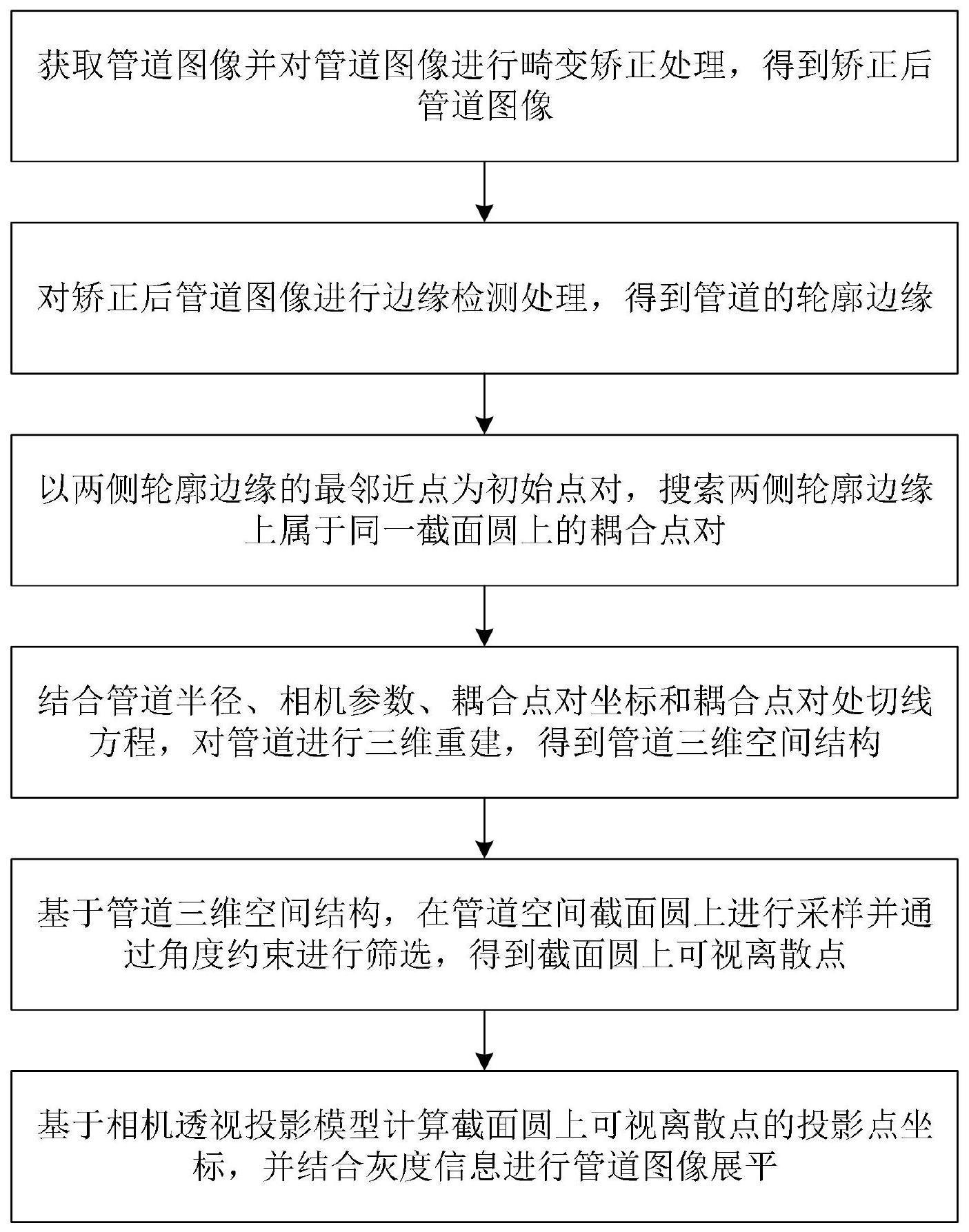
3、获取管道图像并对管道图像进行畸变矫正处理,得到矫正后管道图像;
4、对矫正后管道图像进行边缘检测处理,得到管道的轮廓边缘;
5、以两侧轮廓边缘的最邻近点为初始点对,搜索两侧轮廓边缘上属于同一截面圆上的耦合点对;
6、结合管道半径、相机参数、耦合点对坐标和耦合点对处切线方程,对管道进行三维重建,得到管道三维空间结构;
7、基于管道三维空间结构,在管道空间截面圆上进行采样并通过角度约束进行筛选,得到截面圆上可视离散点;
8、基于相机透视投影模型计算截面圆上可视离散点的投影点坐标,并结合灰度信息进行管道图像展平。
9、进一步,所述获取管道图像并对管道图像进行畸变矫正处理,得到矫正后管道图像这一步骤,其具体包括:
10、对相机进行标定,得到相机内参和镜头畸变系数;
11、利用相机拍摄管道图像;
12、根据镜头畸变系数对管道图像进行畸变矫正处理,得到矫正后管道图像。
13、通过该优选步骤,预先对相机进行标定,有助于后续的图像处理的计算。
14、进一步,所述对矫正后管道图像进行边缘检测处理,得到管道的轮廓边缘这一步骤,其具体包括:
15、基于u-net全卷积神经网络对矫正后管道图像进行边缘检测,得到初步轮廓;
16、采用高斯平滑方法对初步轮廓进行平滑处理,得到管道的轮廓边缘。
17、通过该优选步骤,对检测出来的轮廓边缘进行平滑处理,能够得到更精确和易于识别的轮廓边缘。
18、进一步,耦合点对搜索的约束条件为:
19、
20、ω=k-tk-1
21、上式中,为耦合点对(p1,p2)的齐次坐标,为管道轮廓边缘上耦合点对处切线l1、l2交点v的齐次坐标,k表示相机内参,t表示向量的转置,当lcoupling的结果近似为零时,管道两轮廓边缘上的点p1、p2为属于同一截面圆上的耦合点对。
22、进一步,所述结合管道半径、相机参数、耦合点对坐标和耦合点对处切线方程,对管道进行三维重建,得到管道三维空间结构这一步骤,其具体包括:
23、根据管道半径、相机参数、耦合点对坐标和耦合点对处切线方程计算管道截面圆圆心的三维坐标;
24、将管道截面圆圆心的三维坐标进行整合,得到管道轴线三维坐标;
25、根据管道轴线三维坐标和半径进行管道三维重建,得到管道三维空间结构。
26、进一步,所述管道截面圆圆心的三维坐标的计算公式如下:
27、
28、上式中,r表示管道半径,k表示相机内参,表示管道轮廓边缘上耦合点对处切线l1、l2交点v的齐次坐标,q点为交点v反投影射线与管道截面圆支撑平面的交点,nqpc为q到截面圆圆心pc的方向向量,α为耦合点p1或p2反投影射线与交点v反投影射线所形成的夹角,β为耦合点对处切线l1、l2反投影平面所形成的夹角。
29、进一步,所述基于管道三维空间结构,在管道空间截面圆上进行采样并通过角度约束进行筛选,得到截面圆上可视离散点这一步骤,其具体包括:
30、基于管道三维空间结构,采用等角度采样的方式在管道空间截面圆上进行采样,得到离散点;
31、计算相机光心到离散点的方向向量与对应截面圆圆心到离散点的方向向量的夹角;
32、判断到夹角大于等于预设阈值,确定该离散点为可视离散点。
33、进一步,每个截面圆上相邻离散点的轴向距离与相邻截面圆之间的轴向距离相等。
34、通过该优选步骤的限定,以确保最终得到的展开图为等比例的管道表面展平图像。
35、本发明所采用的第二技术方案是:一种基于轮廓边缘的管道表面图像展平系统,包括:
36、预处理模块,用于获取管道图像并对管道图像进行畸变矫正处理,得到矫正后管道图像;
37、边缘检测模块,用于对矫正后管道图像进行边缘检测处理,得到管道的轮廓边缘;
38、点对搜索模块,用于以两侧轮廓边缘的最邻近点为初始点对,搜索两侧轮廓边缘上属于同一截面圆上的耦合点对;
39、三维重建模块,用于结合管道半径、相机参数、耦合点对坐标和耦合点对处切线方程,对管道进行三维重建,得到管道三维空间结构;
40、点采样模块,基于管道三维空间结构,在管道空间截面圆上进行等角度采样并通过角度约束进行筛选,得到截面圆上可视离散点;
41、图像展平模块,基于相机透视投影模型计算截面圆上可视离散点的投影点坐标,并结合灰度信息进行管道图像展平。
42、本发明方法及系统的有益效果是:本发明基于普通相机和一系列的图像处理步骤,即可实现管道的三维重建和表面图像的有效展开,最终获得的管道表面展开图更有利于巡检人员或者计算机完成管道表面异常的观察、检测和识别。
技术特征:
1.一种基于轮廓边缘的管道表面图像展平方法,其特征在于,包括以下步骤:
2.根据权利要求1所述一种基于轮廓边缘的管道表面图像展平方法,其特征在于,所述获取管道图像并对管道图像进行畸变矫正处理,得到矫正后管道图像这一步骤,其具体包括:
3.根据权利要求2所述一种基于轮廓边缘的管道表面图像展平方法,其特征在于,所述对矫正后管道图像进行边缘检测处理,得到管道的轮廓边缘这一步骤,其具体包括:
4.根据权利要求3所述一种基于轮廓边缘的管道表面图像展平方法,其特征在于,耦合点对搜索的约束条件为:
5.根据权利要求4所述一种基于轮廓边缘的管道表面图像展平方法,其特征在于,所述结合管道半径、相机参数、耦合点对坐标和耦合点对处切线方程,对管道进行三维重建,得到管道三维空间结构这一步骤,其具体包括:
6.根据权利要求5所述一种基于轮廓边缘的管道表面图像展平方法,其特征在于,所述管道截面圆圆心的三维坐标的计算公式如下:
7.根据权利要求5所述一种基于轮廓边缘的管道表面图像展平方法,其特征在于,所述基于管道三维空间结构,在管道空间截面圆上进行采样并通过角度约束进行筛选,得到截面圆上可视离散点这一步骤,其具体包括:
8.根据权利要求7所述一种基于轮廓边缘的管道表面图像展平方法,其特征在于,每个截面圆上相邻离散点的轴向距离与相邻截面圆之间的轴向距离相等。
9.一种基于轮廓边缘的管道表面图像展平系统,其特征在于,包括:
技术总结
本发明公开了一种基于轮廓边缘的管道表面图像展平方法及系统,该方法包括:获取管道图像并对管道图像进行畸变矫正处理;对矫正后管道图像进行边缘检测处理;搜索两侧轮廓边缘上属于同一截面圆上的耦合点对;结合管道半径、相机参数、耦合点对坐标和耦合点对处切线方程,对管道进行三维重建;在管道空间截面圆上进行采样并通过角度约束进筛选出截面圆上可视离散点;计算截面圆上可视离散点的投影点坐标,并结合灰度信息进行管道图像展平。该系统包括:预处理模块、边缘检测模块、点对搜索模块、三维重建模块、点采样模块和图像展平模块。通过使用本发明,能够实现管道的三维重建和表面图像的有效展开。本发明可广泛应用于图像矫正领域。
技术研发人员:程晓琦,钟柏煜,李小松,谭海曙,乔健,杨景卫
受保护的技术使用者:佛山科学技术学院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!