基于重卡电池自动换电系统的深度相机外参标定方法与流程
本发明涉及新能源换电,尤其涉及基于重卡电池自动换电系统的深度相机外参标定方法。
背景技术:
1、重卡电池的自动换电系统是一种顶吊式的换电方式,如图1所示,主要包括重卡及其电池包、可以移动的吊具、安装于吊具下的深度相机以及边端控制器。为了实现吊具对电池的精确定位和自动抓取,需要依靠相机对重卡电池包的检测和定位,用以判断吊具应该移动的方向及偏移量。
2、因为相机的安装位置难以保证位于吊具的中心且垂直于电池包的检测面,为了更精确地给出吊具应该移动的偏移量,需要标定相机的外参,即相机坐标系和吊具坐标系之间的变换关系,包括平移和旋转变换。
技术实现思路
1、本发明旨在提供基于重卡电池自动换电系统的深度相机外参标定方法克服上述问题或者至少部分地解决上述问题。
2、为达到上述目的,本发明的技术方案具体是这样实现的:
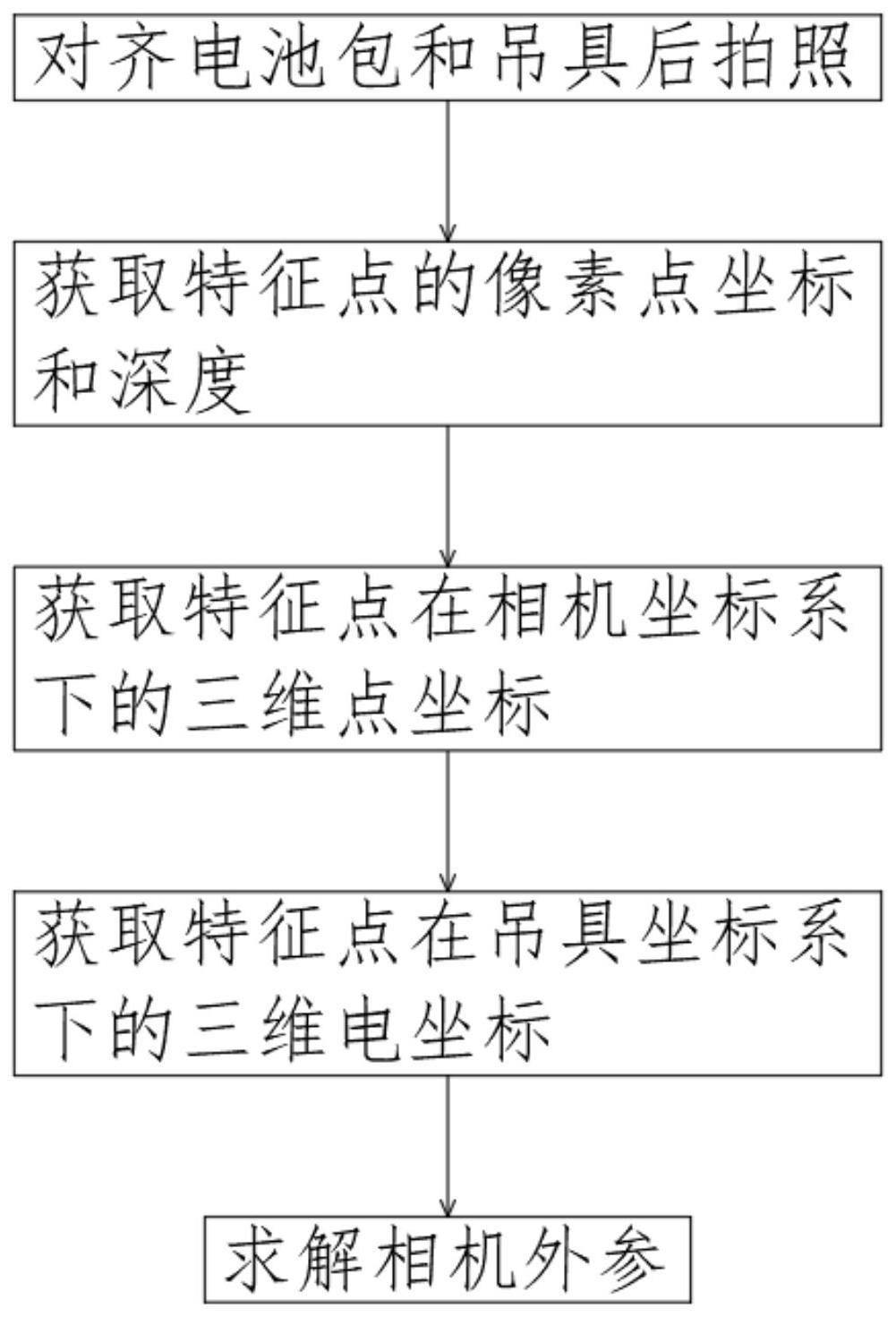
3、本发明的提供了基于重卡电池自动换电系统的深度相机外参标定方法,包括以下步骤:
4、(1)将吊具移动到电池包正上方对齐电池框,使得吊具中心和电池包中心对齐,且对应边缘平行;
5、(2)对齐后上升到一定高度位置后对着电池包拍照,获取图像上电池框的四个关键特征点的像素点坐标和对应的深度图像数据;
6、(3)利用特征点的像素点坐标及其深度值,做投影逆变换获取特征点在相机坐标系下的三维点坐标;
7、(4)通过实际测量电池的物理尺寸,获取四个特征点在吊具坐标系下的三维点坐标;
8、(5)通过四个特征点在相机坐标系和吊具坐标系下的对应关系,使用迭代法求解从相机坐标系到吊具坐标系的平移和旋转变换。
9、作为本发明进一步的方案,在步骤(1)和(2)中,所述吊具对齐电池包的方法具体为:
10、步骤一,将吊具在z轴方向上下降,落到电池包上方,然后调整吊具位置,对齐吊具和电池包;
11、步骤二,通过移动吊具在x轴方向和y轴方向的偏移,以及旋转吊具的角度,保证吊具中心和电池中心在同一垂直线上,且对应边缘平行;
12、步骤三,对齐后,再将吊具上升到初始高度,上升时只改变z轴方向的位置,保持吊具在x轴方向和y轴方向的位置不变以及角度不变,然后对着电池包拍照。
13、作为本发明进一步的方案,在步骤(3)中,所述利用特征点的像素点坐标及其深度值,在彩色图片上识别出电池包上较明显的四个点分别作为四个特征点。
14、作为本发明进一步的方案,所述识别像素点坐标的方法采用深度神经网络yolo检测模型和在图像上标注的方式获取四个特征点的像素点坐标方法中的一种。
15、作为本发明进一步的方案,在步骤(4)中,所述获取到特征点的像素点坐标及其深度值后,通过相机的反投影变换获取特征点在相机坐标系下的三维点坐标;
16、特征点的像素点坐标(u,v),深度值d,相机坐标系的三维点坐标(xc,yc,zc),相机的内参包括像距fx,fy和距离中心的偏移cx,cy;
17、它们之间的变换关系如下:
18、
19、作为本发明更进一步的方案,在步骤(4)中,所述电池包坐标系的x轴以及y轴和吊具坐标系的x轴以及y轴重合,z轴平行且中心点的连线平行z轴,通过测量电池框上主要特征点的物理距离,获取特征点在吊具坐标系下的三维点坐标。
20、作为本发明更进一步的方案,所述通过上述步骤获取了四组对应的三维点对,分别是特征点在相机坐标系下的三维点坐标和在吊具坐标系下的三维点坐标
21、作为本发明更进一步的方案,所述相机坐标系到吊具坐标系的旋转和平移变换使用kabsch算法求解,该算法以最小化变换后的点集p,即p’和q的均方误差为目标。
22、本发明提供了基于重卡电池自动换电系统的深度相机外参标定方法,有益效果在于:
23、本发明提出的深度相机外参标定方法适用于重卡电池的自动换电场景;
24、本标定方法操作简单,只需要单张图片的4个特征点即可实现外参的标定;
25、本发明提出的标定方法可以帮助重卡换电时实现更高精度的偏移量计算值。
技术特征:
1.基于重卡电池自动换电系统的深度相机外参标定方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于重卡电池自动换电系统的深度相机外参标定方法,其特征在于,在步骤(1)和(2)中,所述吊具(3)对齐电池包(6)的方法具体为:
3.根据权利要求1所述的基于重卡电池自动换电系统的深度相机外参标定方法,其特征在于,在步骤(3)中,所述利用特征点的像素点坐标及其深度值,在彩色图片上识别出电池包(6)上较明显的四个点分别作为四个特征点。
4.根据权利要求3所述的基于重卡电池自动换电系统的深度相机外参标定方法,其特征在于,所述识别像素点坐标的方法采用深度神经网络yolo检测模型和在图像上标注的方式获取四个特征点的像素点坐标方法中的一种。
5.根据权利要求1所述的基于重卡电池自动换电系统的深度相机外参标定方法,其特征在于,在步骤(4)中,所述获取到特征点的像素点坐标及其深度值后,通过相机(5)的反投影变换获取特征点在相机(5)坐标系下的三维点坐标;
6.根据权利要求1所述的基于重卡电池自动换电系统的深度相机外参标定方法,其特征在于,在步骤(4)中,所述电池包(6)坐标系的x轴和y轴与吊具(3)坐标系的x轴和y轴重合,z轴平行且中心点的连线平行z轴,通过测量电池框上主要特征点的物理距离,获取特征点在吊具(3)坐标系下的三维点坐标。
7.根据权利要求6所述的基于重卡电池自动换电系统的深度相机外参标定方法,其特征在于,所述通过上述步骤获取了四组对应的三维点对,分别是特征点在相机(5)坐标系下的三维点坐标和在吊具(3)坐标系下的三维点坐标
8.根据权利要求7所述的基于重卡电池自动换电系统的深度相机外参标定方法,其特征在于,所述相机(5)坐标系到吊具(3)坐标系的旋转和平移变换使用kabsch算法求解,该算法以最小化变换后的点集p,即p’和q的均方误差为目标。
技术总结
本发明提供了基于重卡电池自动换电系统的深度相机外参标定方法,包括以下步骤:将吊具移动到电池包正上方对齐电池框,使得吊具中心和电池包中心对齐;对齐后上升到一定高度位置后对着电池包拍照,获取图像上电池框的四个关键特征点的像素点坐标和对应的深度图像数据;利用特征点的像素点坐标及其深度值,做投影逆变换获取特征点在相机坐标系下的三维点坐标;获取四个特征点在吊具坐标系下的三维点坐标;使用迭代法求解从相机坐标系到吊具坐标系的平移和旋转变换。本发明操作简单,只需要单张图片的4个特征点即可实现外参的标定,可以帮助重卡换电时实现更高精度的偏移量计算值。
技术研发人员:吴如伟,李同欢,高志文,查俊,吴传虎,万琳
受保护的技术使用者:安徽绿舟科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!