高速运动体表面气动压力场的预测方法及装置
本发明涉及人工智能和高端设备的交叉,尤其涉及一种高度运动体表面气动压力场的预测方法及装置。
背景技术:
1、高速运动体的速度通常超过5倍声速,其滑翔飞行时距地球表面高度超过20公里。在飞行过程中,高速气流会对运动体结构表面产生气动压力,进而产生气动加热效应,可能会形成上千度的高温,危害高速运动体的飞行安全。高速运动体在进行动态轨迹规划时,需要考虑热防护的需求,还需要考虑气动热效应,因此,对表面气动压力场的快速、准确预测十分重要。
2、高速运动体表面的气动压力场可以利用工程法计算或计算流体力学仿真等方法来获得。其中,工程法计算常用切锥法、切楔法以及牛顿法等经验模型进行近似求解,计算相对较快,但是精度比较有限,而且需要根据问题场景选择合适的经验模型。计算流体动力学仿真对气动过程建立偏微分方程组并进行数值求解,相比工程法计算更准确,但是计算量大、耗时长。
3、根据上述,以上两种方法虽然可以对气动压力场进行解算,但难以满足快速、准确预测的需求。
技术实现思路
1、本发明提供一种高速运动体表面气动压力场的预测方法及装置,用以克服现有技术无法对高速运动体表面的气动压力场进行快速、准确预测的缺陷,实现特定飞行状态下高速运动体表面气动压力场的快速、准确预测。
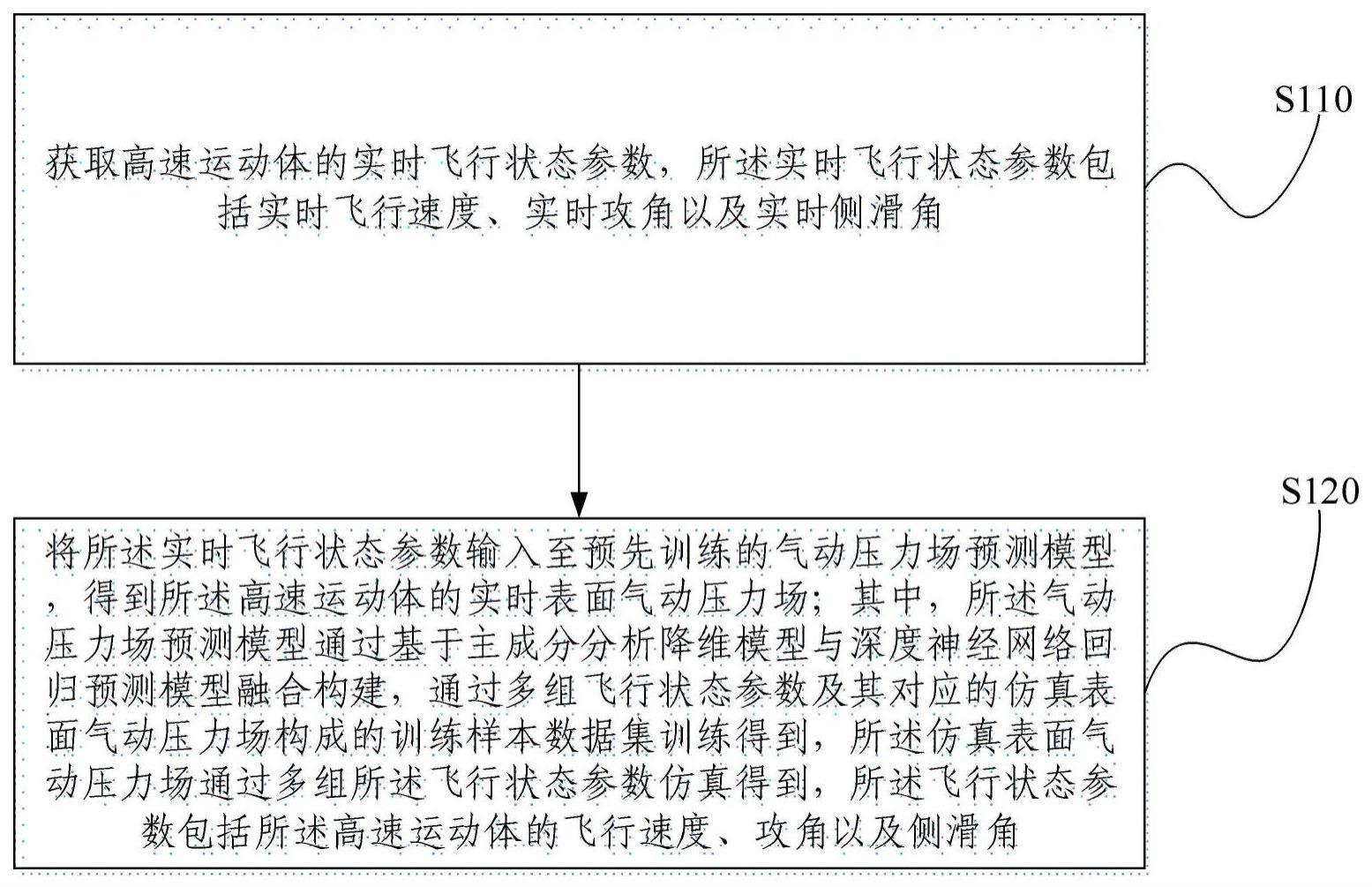
2、一方面,本发明提供一种高速运动体表面气动压力场的预测方法,包括:获取高速运动体的实时飞行状态参数,所述实时飞行状态参数包括实时飞行速度、实时攻角以及实时侧滑角;将所述实时飞行状态参数输入至预先训练的气动压力场预测模型,得到所述高速运动体的实时表面气动压力场;其中,所述气动压力场预测模型基于主成分分析降维模型与深度神经网络回归预测模型融合构建,通过多组飞行状态参数及其对应的仿真表面气动压力场构成的训练样本数据集训练得到,所述仿真表面气动压力场通过多组所述飞行状态参数仿真得到,所述飞行状态参数包括所述高速运动体的飞行速度、攻角以及侧滑角。
3、进一步地,所述将所述实时飞行状态参数输入至预先训练的气动压力场预测模型,得到所述高速运动体的表面气动压力场,包括:将所述实时飞行状态参数输入至所述深度神经网络回归预测模型,得到所述实时飞行状态参数对应的低维表面气动压力场表征;将所述低维表面气动压力场表征输入至所述主成分分析降维模型,重构得到所述实时飞行状态参数对应的高维表面气动压力场;其中,所述实时表面气动压力场为所述高维表面气动压力场。
4、进一步地,将所述高速运动体的表面气动外形划分为多个区域,每个区域分别对应独立的气动压力场预测模型;所述将所述实时飞行状态参数输入至预先训练的气动压力场预测模型,得到所述高速运动体的表面气动压力场,包括:将所述实时飞行状态参数分别输入至每个区域对应的气动压力场预测模型,得到所述多个区域对应的多个区域表面气动压力场;对所述多个区域表面气动压力场进行合并处理,得到所述高速运动体的实时表面气动压力场。
5、进一步地,对所述气动压力场预测模型进行训练,具体包括:基于离线仿真方法构建所述训练样本数据集;利用所述训练样本数据集对所述气动压力场预测模型进行训练,得到训练好的所述气动压力场预测模型。
6、进一步地,每一组所述飞行状态参数对应一个训练样本储存文件,所述训练样本储存文件包括文件头部信息、节点信息以及网格信息;其中,所述节点信息包括高速运动体表面气动外形所包含节点的节点坐标值,以及该节点对应的压力值,所述网格信息为高速运动体表面气动外形所包含的每一表面网格对应的节点序号。
7、进一步地,利用所述训练样本数据集对所述气动压力场预测模型进行训练,包括:将所述训练样本数据集中的仿真表面气动压力场输入至所述主成分分析降维模型,得到所述仿真表面气动压力场对应的低维压力场表征;将所述训练样本数据集中的飞行状态参数输入至所述深度神经网络回归预测模型,以所述低维压力场表征作为预测真值,对所述深度神经网络回归预测模型进行有监督的训练。
8、进一步地,对所述气动压力场预测模型的预测性能进行评估,具体包括获取所述气动压力场预测模型在训练过程中输出的预测表面气动压力场;计算所述预测表面气动压力场对应的预测整体力与力矩;计算所述仿真表面气动压力场对应的仿真整体力与力矩;基于所述预测整体力与力矩,以及所述仿真整体力与力矩,对所述气动压力场预测模型的预测性能进行评估。
9、进一步地,所述高速运动体表面气动压力场的预测方法还包括:通过可视化软件对所述高速运动体的实时表面气动压力场进行可视化。
10、第二方面,本发明还提供一种高速运动体表面气动压力场的预测装置,包括:实时飞行状态参数获取模块,用于获取高速运动体的实时飞行状态参数,所述实时飞行状态参数包括实时飞行速度、实时攻角以及实时侧滑角;表面气动压力场预测模块,用于将所述实时飞行状态参数输入至预先训练的气动压力场预测模型,得到所述高速运动体的实时表面气动压力场;其中,所述气动压力场预测模型基于主成分分析降维模型与深度神经网络回归预测模型融合构建,通过多组飞行状态参数及其对应的仿真表面气动压力场构成的训练样本数据集训练得到,所述仿真表面气动压力场通过多组所述飞行状态参数仿真得到,所述飞行状态参数包括所述高速运动体的飞行速度、攻角以及侧滑角。
11、第三方面,本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述高速运动体表面气动压力场的预测方法。
12、第四方面,本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述高速运动体表面气动压力场的预测方法。
13、本发明提供的一种高速运动体表面气动压力场的预测方法,通过获取高速运动体的实时飞行状态参数,即实时飞行速度、实时攻角以及实时侧滑角,并将获取的实时飞行状态参数输入至预先训练的气动压力场预测模型,从而得到高速运动体的实时表面气动压力场。该方法通过将主成分分析降维模型与深度神经网络回归预测模型进行融合,得到能够更好地对高维实时表面气动压力场进行预测的气动压力场预测模型,进而实现特定飞行状态下高速运动体表面气动压力场的快速、准确预测。
技术特征:
1.一种高速运动体表面气动压力场的预测方法,其特征在于,包括:
2.根据权利要求1所述的高速运动体表面气动压力场的预测方法,其特征在于,所述将所述实时飞行状态参数输入至预先训练的气动压力场预测模型,得到所述高速运动体的表面气动压力场,包括:
3.根据权利要求2所述的高速运动体表面气动压力场的预测方法,其特征在于,将所述高速运动体的表面气动外形划分为多个区域,每个区域分别对应独立的气动压力场预测模型;
4.根据权利要求1所述的高速运动体表面气动压力场的预测方法,其特征在于,对所述气动压力场预测模型进行训练,具体包括:
5.根据权利要求4所述的高速运动体表面气动压力场的预测方法,其特征在于,每一组所述飞行状态参数对应一个训练样本储存文件,所述训练样本储存文件包括文件头部信息、节点信息以及网格信息;
6.根据权利要求4所述的高速运动体表面气动压力场的预测方法,其特征在于,利用所述训练样本数据集对所述气动压力场预测模型进行训练,包括:
7.根据权利要求6所述的高速运动体表面气动压力场的预测方法,其特征在于,对所述气动压力场预测模型的预测性能进行评估,具体包括:
8.根据权利要求1-7中任一项所述的高速运动体表面气动压力场的预测方法,其特征在于,还包括:
9.一种高速运动体表面气动压力场的预测装置,其特征在于,包括:
10.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至8任一项所述的高速运动体表面气动压力场的预测方法的步骤。
11.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至8任一项所述的高速运动体表面气动压力场的预测方法的步骤。
技术总结
本发明提供一种高速运动体表面气动压力场的预测方法及装置,其中的方法包括:获取高速运动体的实时飞行状态参数,实时飞行状态参数包括实时飞行速度、实时攻角以及实时侧滑角;将实时飞行状态参数输入至预先训练的气动压力场预测模型,得到高速运动体的实时表面气动压力场;其中,气动压力场预测模型通过主成分分析降维模型与深度神经网络回归预测模型融合得到。该方法通过将主成分分析降维模型与深度神经网络回归预测模型进行融合,得到能够更好地对高维实时表面气动压力场进行预测的气动压力场预测模型,进而实现特定飞行状态下高速运动体表面气动压力场的快速、准确预测。
技术研发人员:陈旭佳,杜澍浛,刘梦鸽,铁鸣,方洪,王建林,刘义,范文慧
受保护的技术使用者:清华大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!