基于车辆传感器的感知融合方法及装置与流程
本发明涉及智能驾驶,尤其涉及基于车辆传感器的感知融合方法及装置。
背景技术:
1、基于车辆传感器的感知融合是智能驾驶系统中的重要环节之一,其算法精度往往决定了智能驾驶系统安全性的高低。根据数据融合方式的不同,感知融合算法可以分为三大类:数据级融合、特征级融合和决策级融合,决策级融合指的是利用传感器感知算法所得到的检测目标(感知目标)进行融合,决策级融合具有融合精度高、运行速度快的特点,受到许多主流车企的青睐。
2、决策级融合常见的融合算法为最近邻数据关联法(例如匈牙利算法),某些特定场景下,通过最近邻数据关联法得出的最优匹配结果与真实情况差距较大,使距离过大的融合目标和感知目标进行了关联匹配,降低了智能驾驶的安全性。
技术实现思路
1、本发明通过提供基于车辆传感器的感知融合方法及装置,解决了现有技术中车辆智能驾驶感知融合关联匹配误差大的技术问题。
2、一方面,本发明提供如下技术方案:
3、一种基于车辆传感器的感知融合方法,包括:
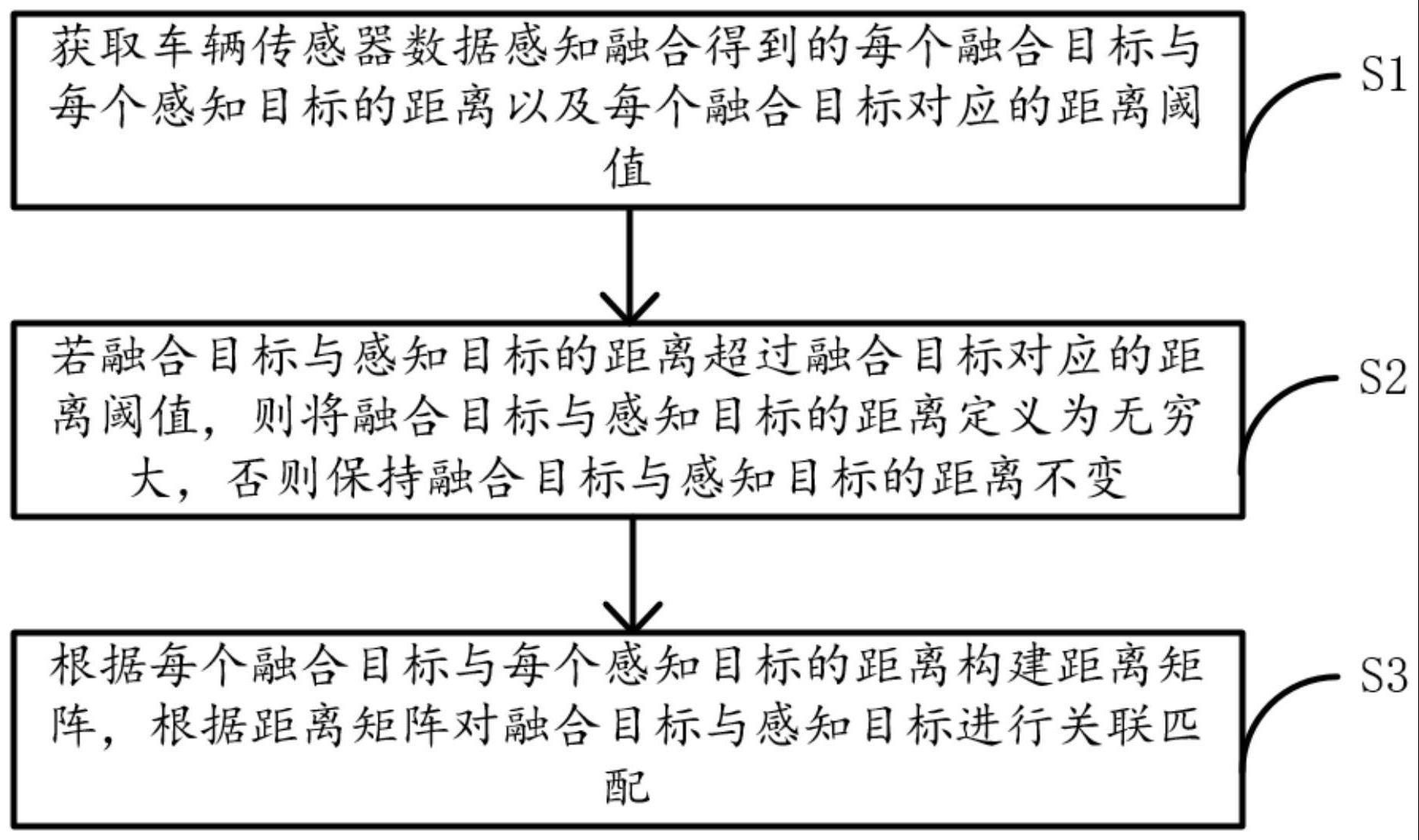
4、获取车辆传感器数据感知融合得到的每个融合目标与每个感知目标的距离以及每个所述融合目标对应的距离阈值;
5、若所述融合目标与所述感知目标的距离超过所述融合目标对应的距离阈值,则将所述融合目标与所述感知目标的距离定义为无穷大,否则保持所述融合目标与所述感知目标的距离不变;
6、根据每个所述融合目标与每个所述感知目标的距离构建距离矩阵,根据所述距离矩阵对所述融合目标与所述感知目标进行关联匹配。
7、优选的,获取每个所述融合目标对应的距离阈值,包括:
8、获取所述融合目标的横向位置坐标和纵向位置坐标;
9、根据所述融合目标的横向位置坐标和纵向位置坐标计算所述融合目标对应的距离阈值。
10、优选的,所述根据所述融合目标的横向位置坐标和纵向位置坐标计算所述融合目标对应的距离阈值,包括:
11、
12、为第i个所述融合目标对应的距离阈值,xi、yi分别为第i个所述融合目标的横向位置坐标、纵向位置坐标,α、β分别为横向距离的放大系数、纵向距离的放大系数,γ为常数。
13、优选的,获取所述融合目标与所述感知目标的距离,包括:
14、获取所述融合目标和所述感知目标的横向位置坐标、纵向位置坐标、横向速度矢量和纵向速度矢量;
15、根据所述融合目标和所述感知目标的横向位置坐标、纵向位置坐标、横向速度矢量和纵向速度矢量计算所述融合目标与所述感知目标的距离。
16、优选的,所述根据每个所述融合目标与每个所述感知目标的距离构建距离矩阵,根据所述距离矩阵对所述融合目标与所述感知目标进行关联匹配之后,还包括:
17、获取所述感知目标对应的传感器的位置感知精度;
18、若所述传感器的位置感知精度低于第一精度阈值,则获取与所述感知目标匹配的所述融合目标的位置坐标,并根据所述融合目标的位置坐标更新所述感知目标的位置坐标;
19、若所述传感器的位置感知精度高于所述第一精度阈值,则保持所述感知目标的位置坐标不变。
20、优选的,所述根据每个所述融合目标与每个所述感知目标的距离构建距离矩阵,根据所述距离矩阵对所述融合目标与所述感知目标进行关联匹配之后,还包括:
21、获取所述感知目标对应的传感器的速度感知精度;
22、若所述传感器的速度感知精度低于第二精度阈值,则获取与所述感知目标匹配的所述融合目标的速度矢量,并根据所述融合目标的速度矢量更新所述感知目标的速度矢量;
23、若所述传感器的速度感知精度高于所述第二精度阈值,则保持所述感知目标的速度矢量不变。
24、优选的,所述根据每个所述融合目标与每个所述感知目标的距离构建距离矩阵,根据所述距离矩阵对所述融合目标与所述感知目标进行关联匹配之后,还包括:
25、获取集合x中每个所述融合目标的存在周期,对集合x中的所述融合目标按照存在周期从小到大排序;
26、循环进行预设过程,直至集合x中的每个所述融合目标均写入集合y中;所述预设过程为:将集合x中的第一个融合目标写入集合y中,剔除集合x中的第一个融合目标,计算集合x中每个所述融合目标与所述第一个融合目标的重叠部分体积和体积和,并计算集合x中每个所述融合目标对应的所述重叠部分体积与所述体积和的比值,若所述比值大于预设阈值,则将对应的所述融合目标从集合x中剔除。
27、另一方面,本发明还提供如下技术方案:
28、一种基于车辆传感器的感知融合装置,包括:
29、数据获取模块,用于获取车辆传感器数据感知融合得到的每个融合目标与每个感知目标的距离以及每个所述融合目标对应的距离阈值;
30、距离定义模块,用于若所述融合目标与所述感知目标的距离超过所述融合目标对应的距离阈值,则将所述融合目标与所述感知目标的距离定义为无穷大,否则保持所述融合目标与所述感知目标的距离不变;
31、关联匹配模块,用于根据每个所述融合目标与每个所述感知目标的距离构建距离矩阵,根据所述距离矩阵对所述融合目标与所述感知目标进行关联匹配。
32、另一方面,本发明还提供如下技术方案:
33、一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现上述任一基于车辆传感器的感知融合方法。
34、另一方面,本发明还提供如下技术方案:
35、一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序在被处理器执行时实现上述任一基于车辆传感器的感知融合方法。
36、本发明提供的一个或多个技术方案,至少具有如下技术效果或优点:
37、本发明在融合目标与感知目标的距离超过融合目标对应的距离阈值时将融合目标与感知目标的距离定义为无穷大,这样根据距离矩阵对融合目标与感知目标进行关联匹配时不会将距离过大的融合目标与感知目标进行配对,配对结果更接近真实情况,可以有效消除最近邻数据关联法在某些特定场景下关联匹配误差大的问题。
技术特征:
1.一种基于车辆传感器的感知融合方法,其特征在于,包括:
2.如权利要求1所述的基于车辆传感器的感知融合方法,其特征在于,获取每个所述融合目标对应的距离阈值,包括:
3.如权利要求2所述的基于车辆传感器的感知融合方法,其特征在于,所述根据所述融合目标的横向位置坐标和纵向位置坐标计算所述融合目标对应的距离阈值,包括:
4.如权利要求1所述的基于车辆传感器的感知融合方法,其特征在于,获取所述融合目标与所述感知目标的距离,包括:
5.如权利要求1所述的基于车辆传感器的感知融合方法,其特征在于,所述根据每个所述融合目标与每个所述感知目标的距离构建距离矩阵,根据所述距离矩阵对所述融合目标与所述感知目标进行关联匹配之后,还包括:
6.如权利要求1所述的基于车辆传感器的感知融合方法,其特征在于,所述根据每个所述融合目标与每个所述感知目标的距离构建距离矩阵,根据所述距离矩阵对所述融合目标与所述感知目标进行关联匹配之后,还包括:
7.如权利要求1所述的基于车辆传感器的感知融合方法,其特征在于,所述根据每个所述融合目标与每个所述感知目标的距离构建距离矩阵,根据所述距离矩阵对所述融合目标与所述感知目标进行关联匹配之后,还包括:
8.一种基于车辆传感器的感知融合装置,其特征在于,包括:
9.一种电子设备,其特征在于,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现权利要求1-7中任一项权利要求所述的基于车辆传感器的感知融合方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,所述计算机程序在被处理器执行时实现权利要求1-7中任一项权利要求所述的基于车辆传感器的感知融合方法。
技术总结
本发明公开了基于车辆传感器的感知融合方法及装置,涉及智能驾驶技术领域。本发明在融合目标与感知目标的距离超过融合目标对应的距离阈值时将融合目标与感知目标的距离定义为无穷大,这样根据距离矩阵对融合目标与感知目标进行关联匹配时不会将距离过大的融合目标与感知目标进行配对,配对结果更接近真实情况,可以有效消除最近邻数据关联法在某些特定场景下关联匹配误差大的问题。
技术研发人员:张澳,方阳丽,王绍政,刘会凯
受保护的技术使用者:岚图汽车科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!