相机参数检测方法、装置、电子设备及存储介质与流程
本发明涉及智能驾驶,尤其涉及一种相机参数检测方法、装置、电子设备及存储介质。
背景技术:
1、高精地图作为自动驾驶的专用地图,是车辆安全稳定行驶的重要保障。高精地图一般使用相机采集图像,相机每次采集图像时其参数都会发生变化,而高精地图由图像坐标转换到大地坐标的过程中,尤其依赖相机参数的准确性,因此,相机参数的检测是高精地图生成准确车道的必要过程。
2、为了检测相机参数的准确性,常用的方法是在采集图像时进行人工随机打点,通过对比打点位置与解算出来的位置差距来判断相机参数的准确性。但是在一些车速较快或车流量较大的路段,难以进行人工打点,无法检测相机参数的准确性;另外,在实际采集过程中需要下车人工打点标记,耗费大量时间;并且后期人工统计验证过程复杂,影响检测效率。
3、因此,如何提出一种可以高效检测相机参数的准确性的方法,成为亟需解决的问题。
技术实现思路
1、本发明提供一种相机参数检测方法、装置、电子设备及存储介质,用以解决现有技术中相机参数检测效率低的缺陷,提高了相机参数检测的效率。
2、第一方面,本发明提供一种相机参数检测方法,包括:
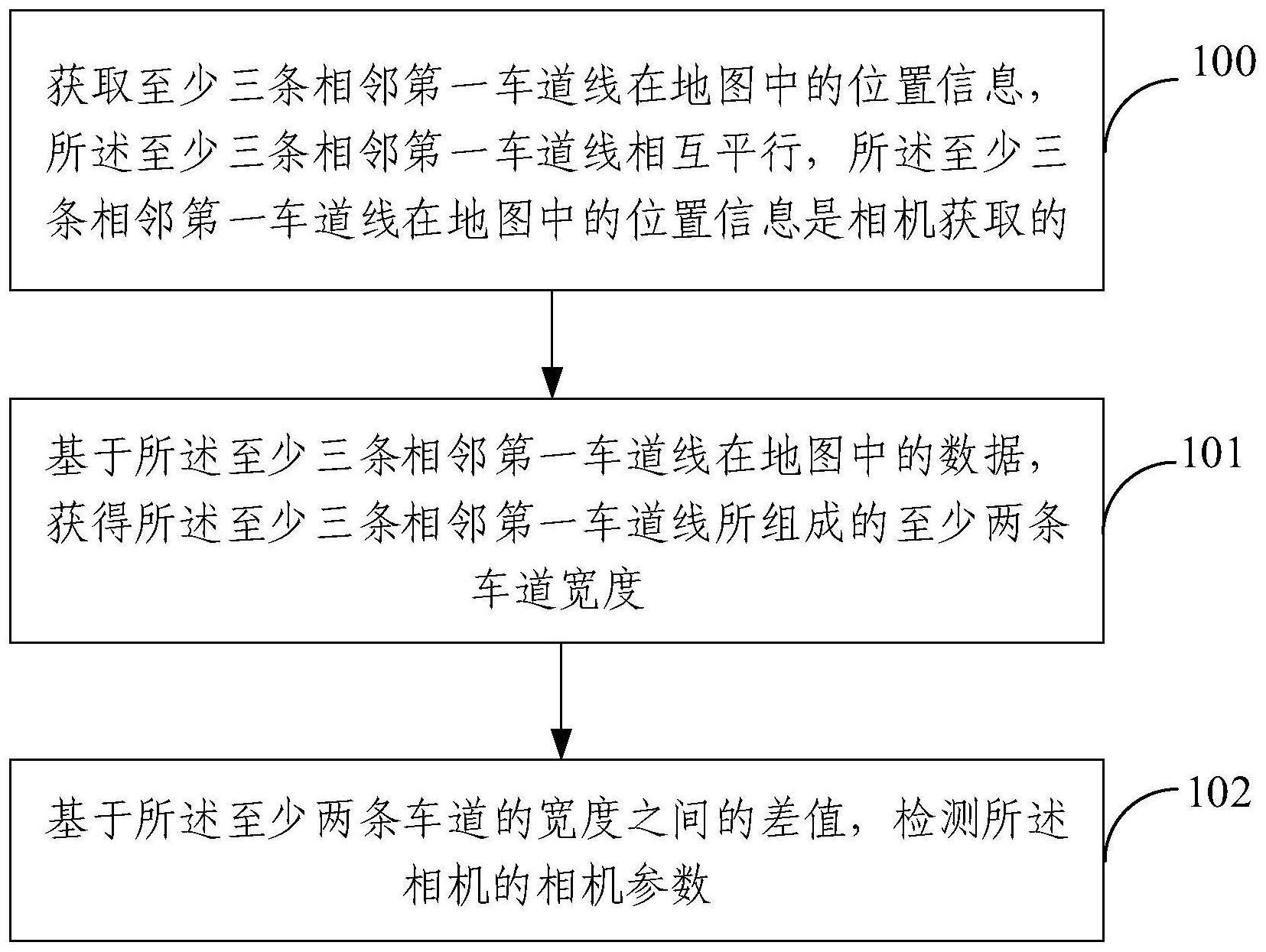
3、获取至少三条相邻第一车道线在地图中的位置信息,所述至少三条相邻第一车道线相互平行,所述至少三条相邻第一车道线在地图中的位置信息是相机获取的;
4、基于所述至少三条相邻第一车道线在地图中的数据,获得所述至少三条相邻第一车道线所组成的至少两条车道的宽度;
5、基于所述至少两条车道的宽度之间的差值,检测所述相机的相机参数。
6、根据本发明提供的一种相机参数检测方法,所述基于所述至少两条车道的宽度之间的差值,检测所述相机的相机参数,包括:
7、在所述至少两条车道的宽度之间的差值小于或等于阈值的情况下,确定所述相机参数准确;
8、在所述至少两条车道的宽度之间的差值大于所述阈值的情况下,确定所述相机参数不准确。
9、根据本发明提供的一种相机参数检测方法,所述获取至少三条相邻第一车道线在地图中的位置信息,包括:
10、获取所述相机获取的初始车道线集合中各初始车道线分别对应的位置信息;
11、基于所述相机获取的初始车道线集合中各初始车道线分别对应的位置信息,从所述初始车道线集合中确定相互平行的至少三条相邻第一车道线。
12、根据本发明提供的一种相机参数检测方法,所述基于所述相机获取的初始车道线集合中各初始车道线分别对应的位置信息,从所述初始车道线集合中确定相互平行的至少三条相邻第一车道线,包括:
13、基于初始车道线集合中各初始车道线分别对应的位置信息,从所述初始车道线集合中排除特殊车道的车道线;
14、所述特殊车道包括以下至少一项:
15、匝道、虚拟车道、十字路口、非机动车道、导流带、超车道。
16、根据本发明提供的一种相机参数检测方法,所述基于所述相机获取的初始车道线集合中各初始车道线分别对应的位置信息,从所述初始车道线集合中确定相互平行的至少三条相邻第一车道线,包括:
17、基于初始车道线集合中各初始车道线分别对应的位置信息,从所述初始车道线集合中排除相邻但不相互平行的车道线。
18、根据本发明提供的一种相机参数检测方法,所述基于初始车道线集合中各初始车道线分别对应的位置信息,从所述初始车道线集合中排除相邻但不相互平行的车道线,包括:
19、基于两条相邻的第二车道线分别对应的位置信息,获取n个车道宽度,所述n个车道宽度分别对应所述两条相邻的第二车道线所组成的车道上n个不同位置的宽度,所述两条相邻的第二车道线为所述初始车道线集合中任意两条相邻的车道线;
20、在所述n个车道宽度中存在任意两个车道宽度之间的差值大于第二阈值的情况下,从所述初始车道线集合中排除所述两条相邻的第二车道线。
21、第二方面,本发明还提供一种相机参数检测装置,包括:
22、位置获取模块,用于获取至少三条相邻第一车道线在地图中的位置信息,所述至少三条相邻第一车道线相互平行,所述至少三条相邻第一车道线在地图中的位置信息是相机获取的;
23、宽度获取模块,用于基于所述至少三条相邻第一车道线在地图中的数据,获得所述至少三条相邻第一车道线所组成的至少两条车道的宽度;
24、检测模块,用于基于所述至少两条车道的宽度之间的差值,检测所述相机的相机参数。
25、第三方面,本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述相机参数检测方法。
26、第四方面,本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述相机参数检测方法。
27、第五方面,本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述相机参数检测方法。
28、本发明提供的相机参数检测方法、装置、电子设备及存储介质,通过相机获取车道线在地图中的位置信息,筛选出相互平行的车道线,由地图中的车道线数据获得所述车道线组成的车道宽度,比较车道宽度之间的差值,实现高精地图中相机参数准确性的检测过程,通过避免采集人员的实地打点,减少地图数据采集的时间,提升检测效率,提高采集人员的安全性。
技术特征:
1.一种相机参数检测方法,其特征在于,包括:
2.根据权利要求1所述的相机参数检测方法,其特征在于,所述基于所述至少两条车道的宽度之间的差值,检测所述相机的相机参数,包括:
3.根据权利要求1所述的相机参数检测方法,其特征在于,所述获取至少三条相邻第一车道线在地图中的位置信息,包括:
4.根据权利要求3所述的相机参数检测方法,其特征在于,所述基于所述相机获取的初始车道线集合中各初始车道线分别对应的位置信息,从所述初始车道线集合中确定相互平行的至少三条相邻第一车道线,包括:
5.根据权利要求3或4所述的相机参数检测方法,其特征在于,所述基于所述相机获取的初始车道线集合中各初始车道线分别对应的位置信息,从所述初始车道线集合中确定相互平行的至少三条相邻第一车道线,包括:
6.根据权利要求5所述的相机参数检测方法,其特征在于,所述基于初始车道线集合中各初始车道线分别对应的位置信息,从所述初始车道线集合中排除相邻但不相互平行的车道线,包括:
7.一种相机参数检测装置,其特征在于,所述装置包括:
8.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至6任一项所述相机参数检测方法。
9.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6任一项所述相机参数检测方法。
10.一种计算机程序产品,包括计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6任一项所述相机参数检测方法。
技术总结
本发明提供一种相机参数检测方法、装置、电子设备及存储介质,包括:获取至少三条相邻第一车道线在地图中的位置信息,至少三条相邻第一车道线相互平行,至少三条相邻第一车道线在地图中的位置信息是相机获取的;基于至少三条相邻第一车道线在地图中的数据,获得至少三条相邻第一车道线所组成的至少两条车道的宽度;基于至少两条车道的宽度之间的差值,检测相机的相机参数。本发明通过相机获取车道线在地图中的位置信息,筛选出相互平行的车道线,获取由其组成的车道的宽度,比较车道宽度之间的差值,实现高精地图中相机参数准确性的高效检测过程,通过避免采集人员的实地打点,提升检测效率,提高采集人员的安全性。
技术研发人员:贾双成,伍越,朱磊,李启超
受保护的技术使用者:智道网联科技(北京)有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!