集装箱锁具解锁方法、装置、设备、介质及集装箱系统与流程
本发明涉及集装箱锁具解锁,尤其涉及一种集装箱锁具解锁方法、装置、设备、介质及集装箱系统。
背景技术:
1、集装箱解锁方式,目前主要依靠激光传感器对锁具进行识别和定位,然后进行解锁。但是,激光扫描的方式容易受到锁具本身形态变化的影响,导致锁具定位不准确,进而影响解锁效果。
技术实现思路
1、本发明提供一种集装箱锁具解锁方法、装置、设备、介质及集装箱系统,用以解决现有技术中锁具定位不准确,影响解锁效果的缺陷。
2、本发明提供一种集装箱锁具解锁方法,包括:
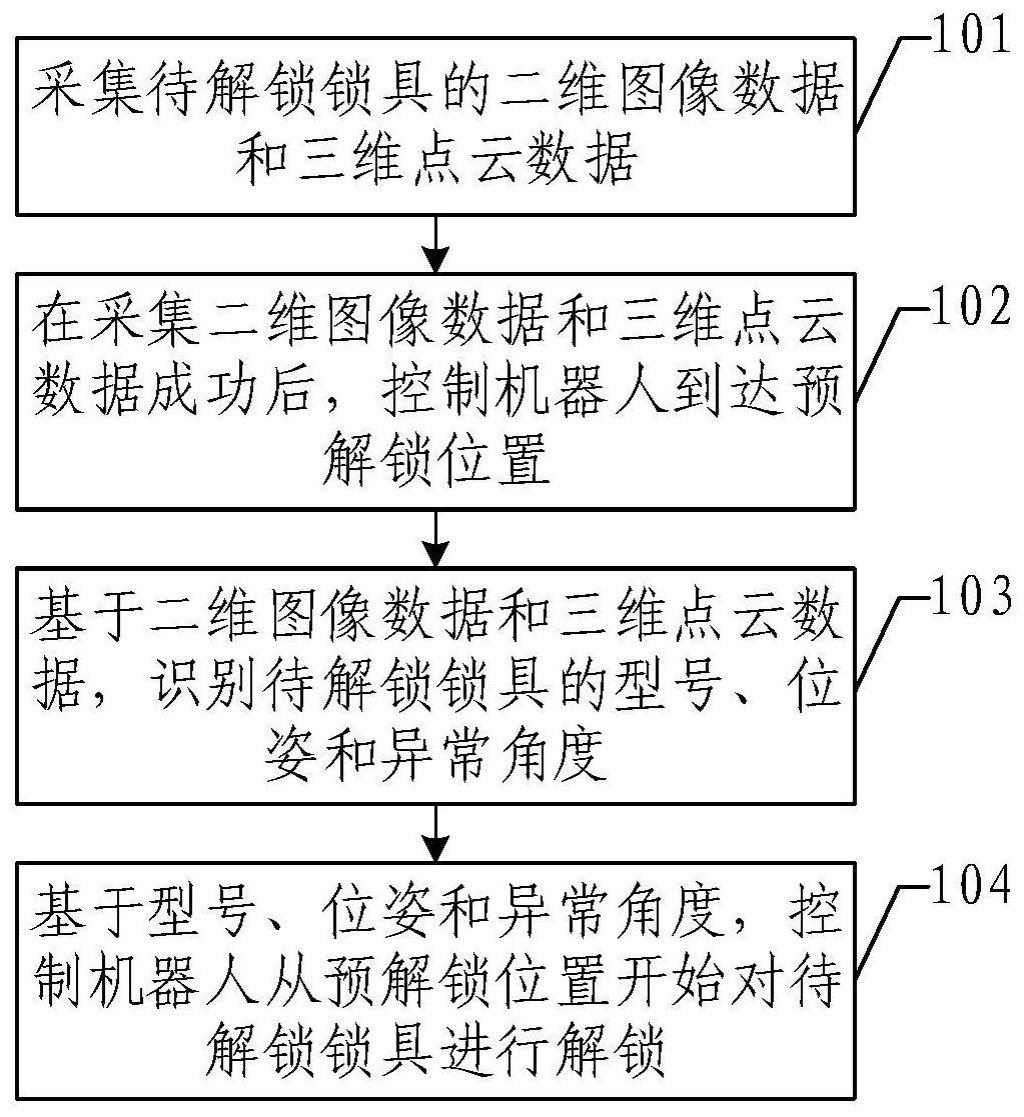
3、采集待解锁锁具的二维图像数据和三维点云数据;
4、在所述采集二维图像数据和所述三维点云数据成功后,控制机器人到达预解锁位置;
5、基于所述二维图像数据和所述三维点云数据,识别所述待解锁锁具的型号、位姿和异常角度;
6、基于所述型号、所述位姿和所述异常角度,控制所述机器人从所述预解锁位置开始对所述待解锁锁具进行解锁。
7、根据本发明提供的一种集装箱锁具解锁方法,所述基于所述二维图像数据和所述三维点云数据,识别所述待解锁锁具的型号、位姿和异常角度,包括:
8、利用视觉算法对所述二维图像数据进行检测,确定出所述待解锁锁具的型号;
9、基于所述三维点云数据和所述型号,确定出所述待解锁锁具一侧的圆孔位置和所述待解锁锁具位置;
10、基于所述圆孔位置和所述待解锁锁具位置,确定所述待解锁锁具的位姿和异常角度。
11、根据本发明提供的一种集装箱锁具解锁方法,所述基于所述三维点云数据和所述型号,确定出所述待解锁锁具一侧的圆孔位置和所述待解锁锁具位置,包括:
12、确定所述待解锁锁具一侧的圆孔位置;
13、获取所述圆孔位置对应的圆孔三维点云数据;
14、基于所述圆孔三维点云数据,按照所述型号对应的预设偏移量确定出所述待解锁锁具位置。
15、根据本发明提供的一种集装箱锁具解锁方法,所述基于所述圆孔位置和所述待解锁锁具位置,确定所述待解锁锁具的位姿,包括:
16、基于所述圆孔位置和待解锁锁具位置,确定所述待解锁锁具对应的三维点云模板;
17、利用所述三维点云模板,确定所述待解锁锁具的位姿。
18、根据本发明提供的一种集装箱锁具解锁方法,所述基于所述圆孔位置和所述待解锁锁具位置,确定所述待解锁锁具的异常角度,包括:
19、根据所述圆孔位置和所述待解锁锁具位置,确定所述待解锁锁具的倾斜角度;
20、当所述倾斜角度大于预设角度时,发出停止解锁的报警提示。
21、根据本发明提供的一种集装箱锁具解锁方法,所述采集待解锁锁具的二维图像数据和三维点云数据,包括:
22、控制3d相机到达预设拍照位置,所述预设拍照位置为所述3d相机拍摄到所述待解锁锁具完整轮廓的位置;
23、在所述预设拍照位置,控制所述3d相机进行拍照,获取所述待解锁锁具的二维图像数据和三维点云数据。
24、本发明还提供一种集装箱锁具解锁装置,包括:
25、采集模块,用于采集待解锁锁具的二维图像数据和三维点云数据;
26、控制模块,用于在所述采集二维图像数据和所述三维点云数据成功后,控制机器人到达预解锁位置;
27、识别模块,用于基于所述二维图像数据和所述三维点云数据,识别所述待解锁锁具的型号、位姿和异常角度;
28、解锁模块,用于基于所述型号、所述位姿和所述异常角度,控制所述机器人从所述预解锁位置开始对所述待解锁锁具进行解锁。
29、本发明还提供一种集装箱系统,所述集装箱系统用于执行如上述任一项所述集装箱锁具解锁方法。
30、本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述集装箱锁具解锁方法。
31、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述集装箱锁具解锁方法。
32、本发明提供的一种集装箱锁具解锁方法、装置、设备、介质及集装箱系统,通过采集待解锁锁具的二维图像数据和三维点云数据;在采集二维图像数据和三维点云数据成功后,控制机器人到达预解锁位置;基于二维图像数据和三维点云数据,识别待解锁锁具的型号、位姿和异常角度;基于型号、位姿和异常角度,控制机器人从预解锁位置开始对待解锁锁具进行解锁,由于结合二维图像数据和三维点云数据来识别待解锁锁具的型号、位姿和异常角度,确保了识别过程不会受到锁具本身形态变化的影响,有效地保证了锁具定位的准确性,进一步地提升了解锁效果。
技术特征:
1.一种集装箱锁具解锁方法,其特征在于,包括:
2.根据权利要求1所述的集装箱锁具解锁方法,其特征在于,所述基于所述二维图像数据和所述三维点云数据,识别所述待解锁锁具的型号、位姿和异常角度,包括:
3.根据权利要求2所述的集装箱锁具解锁方法,其特征在于,所述基于所述三维点云数据和所述型号,确定出所述待解锁锁具一侧的圆孔位置和所述待解锁锁具位置,包括:
4.根据权利要求2所述的集装箱锁具解锁方法,其特征在于,所述基于所述圆孔位置和所述待解锁锁具位置,确定所述待解锁锁具的位姿,包括:
5.根据权利要求2所述的集装箱锁具解锁方法,其特征在于,所述基于所述圆孔位置和所述待解锁锁具位置,确定所述待解锁锁具的异常角度,包括:
6.根据权利要求1-5任一项所述的集装箱锁具解锁方法,其特征在于,所述采集待解锁锁具的二维图像数据和三维点云数据,包括:
7.一种集装箱锁具解锁装置,其特征在于,包括:
8.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至6任一项所述集装箱锁具解锁方法。
9.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,该计算机程序被处理器执行时实现如权利要求1至6任一项所述集装箱锁具解锁方法。
10.一种集装箱系统,其特征在于,所述集装箱系统用于执行如权利要求1至6任一项所述集装箱锁具解锁方法。
技术总结
本发明提供一种集装箱锁具解锁方法、装置、设备、介质及集装箱系统,通过采集待解锁锁具的二维图像数据和三维点云数据;在采集二维图像数据和三维点云数据成功后,控制机器人到达预解锁位置;基于二维图像数据和三维点云数据,识别待解锁锁具的型号、位姿和异常角度;基于型号、位姿和异常角度,控制机器人从预解锁位置开始对待解锁锁具进行解锁,由于结合二维图像数据和三维点云数据来识别待解锁锁具的型号、位姿和异常角度,确保了识别过程不会受到锁具本身形态变化的影响,有效地保证了锁具定位的准确性,进一步地提升了解锁效果。
技术研发人员:吴航,曹恩华
受保护的技术使用者:盛景智能科技(嘉兴)有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!