一种人机猜拳方法、装置、存储介质及机器人与流程
本发明涉及机器人,具体而言,涉及一种人机猜拳方法、装置、存储介质及机器人。
背景技术:
1、随着人机交互技术的不断发展,其在娱乐项目中的应用越来越广泛,例如人机交互技术广泛应用在各种游戏中,能够提高游戏的趣味性。
2、目前,用户与机器人交互进行猜拳游戏时,机器人主要通过摄像头拍摄用户的手势数据以识别用户的手势,再根据用户手势确定其出拳动作。其中,机器人的出拳策略固定,会影响用户的猜拳体验,可玩性较差,例如若机器人出拳策略的胜率较高,会让用户感到沮丧;若机器人出拳策略的胜率较低,会让用户感到没有挑战。
技术实现思路
1、本发明解决的问题是如何提高人机猜拳的体验感和可玩性。
2、为解决上述问题,本发明提供一种人机猜拳方法、装置、存储介质及机器人。
3、第一方面,本发明提供了一种人机猜拳方法,包括:
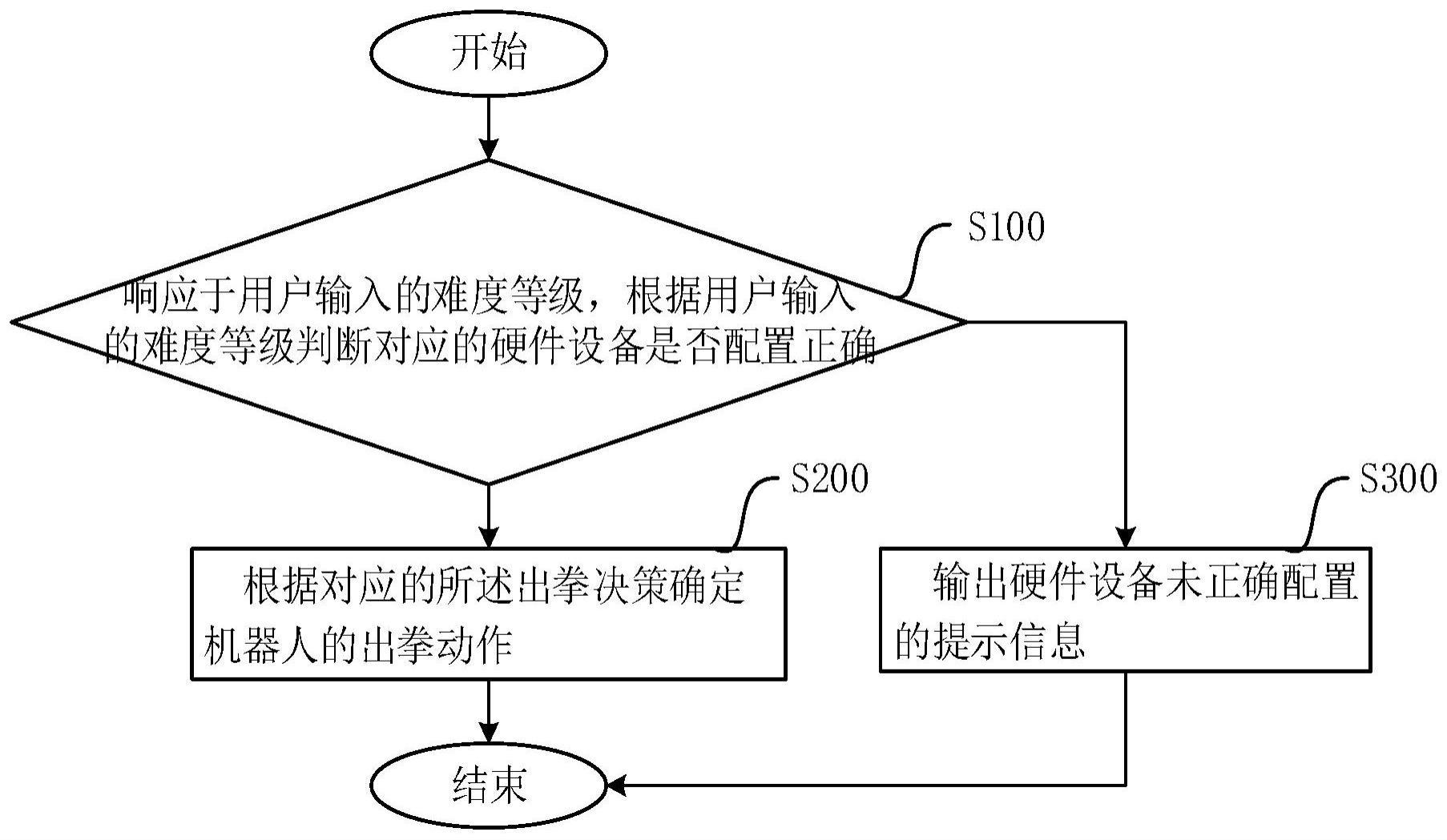
4、响应于用户输入的难度等级,根据所述用户输入的难度等级判断对应的硬件设备是否配置正确,其中,不同的难度等级分别对应不同的出拳决策;
5、若是,则根据对应的所述出拳决策确定机器人的出拳动作。
6、可选地,当所述用户输入的难度等级为第一等级时,所述根据对应的所述出拳决策确定机器人的出拳动作包括:
7、确定当前时间点与预设时间点之间的时间差,并计算所述时间差除以3的余数,不同的余数分别对应不同的出拳动作;
8、根据计算得到的余数确定所述机器人的出拳动作。
9、可选地,当所述用户输入的难度等级为第二等级,且所述机器人上配置有拍摄用户手势的视觉模块时,所述根据对应的所述出拳决策确定机器人的出拳动作包括:
10、随机确定所述机器人的出拳动作,与所述用户进行第一预设次数的猜拳游戏,获取所述视觉模块拍摄的所述用户在猜拳游戏中执行的出拳动作;
11、统计所述第一预设次数内所述用户执行不同出拳动作的第一概率,根据所述第一概率随机确定所述机器人的出拳动作。
12、可选地,当所述用户输入的难度等级为第三等级,且所述机器人上配置有拍摄用户手势的视觉模块时,所述根据对应的所述出拳决策确定机器人的出拳动作包括:
13、随机确定所述机器人的出拳动作,与所述用户进行第二预设次数的猜拳游戏,获取所述视觉模块拍摄的所述用户在猜拳游戏中执行的出拳动作;
14、统计所述第二预设次数内不同出拳动作组合的第二概率,所述出拳动作组合包括当前回合所述用户执行的出拳动作和上一回合所述机器人的出拳动作;
15、根据各种所述出拳动作组合的第二概率构建转移概率矩阵,并根据所述转移概率矩阵和上一回合所述用户执行的所述出拳动作确定所述机器人在当前回合中执行各个出拳动作的第三概率,确定所述机器人执行所述第三概率最大的所述出拳动作。
16、可选地,当所述用户输入的难度等级为第四等级时,所述根据对应的所述出拳决策确定机器人的出拳动作包括:
17、根据所述第一概率随机确定所述机器人的出拳动作,与所述用户进行第三预设次数的猜拳游戏,获取所述视觉模块拍摄的所述用户在猜拳游戏中执行的出拳动作;
18、统计所述第三预设次数内所述用户分别执行不同出拳动作的次数,根据统计的次数修正所述第一概率,得到所述用户执行不同出拳动作的第四概率;
19、根据所述第四概率确定所述机器人的出拳动作。
20、可选地,当所述用户输入的难度等级为第四等级时,所述根据对应的所述出拳决策确定机器人的出拳动作包括:
21、根据所述转移概率矩阵和上一回合所述用户执行的所述出拳动作确定所述机器人在当前回合中的出拳动作,与所述用户进行第四预设次数的猜拳游戏,获取所述视觉模块拍摄的所述用户在猜拳游戏中执行的出拳动作;
22、统计所述第四预设次数内所述用户分别执行不同出拳动作的次数,根据统计的次数修正所述机器人执行不同出拳动作的第三概率,得到所述用户执行不同出拳动作的第五概率;
23、确定所述机器人执行所述第五概率最大的所述出拳动作。
24、可选地,当所述用户输入的难度等级为第五等级,且所述用户正确佩戴用户采集生物体征信息的生物信息采集模块时;所述根据对应的所述出拳决策确定机器人的出拳动作包括:
25、通过所述第一等级至所述第四等级中任一者对应的所述出拳决策确定所述机器人的出拳动作,与所述用户进行猜拳游戏;
26、获取所述视觉模块拍摄的游戏过程中的用户视频,根据所述用户视频识别所述用户的宏表情和微表情;
27、获取所述生物信息采集模块采集的游戏过程中所述用户的生物体征数据,根据所述生物体征数据、所述宏表情和所述微表情识别所述用户的情绪;
28、根据所述用户的情绪调整对应的所述出拳决策,根据调整后的出拳决策确定所述机器人的出拳动作,其中,所述调整后的出拳决策的胜率与所述用户的情绪正相关。
29、第二方面,本发明提供了一种人机猜拳装置,包括:
30、响应模块,用于响应于用户输入的难度等级,根据所述用户输入的难度等级判断对应的硬件设备是否配置正确,其中,不同的难度等级分别对应不同的出拳决策;
31、处理模块,用于当对应的硬件设备正确配置时,根据对应的所述出拳决策确定机器人的出拳动作。
32、第三方面,本发明提供了一种计算机可读存储介质,所述存储介质上存储有计算机程序,当所述计算机程序被处理器执行时,实现如第一方面任一项所述的人机猜拳方法。
33、第四方面,本发明提供了一种机器人,包括动作装置、感知装置和控制装置,所述控制装置用于实现如第一方面任一项所述的人机猜拳方法;
34、所述动作装置包括机械臂模块和末端执行器模块,所述末端执行器模块与所述机械臂模块的末端可拆卸连接,所述机械臂模块和所述末端执行器模块分别与所述控制装置连接;
35、所述感知装置包括视觉模块和生物信息采集模块,所述视觉模块和所述生物信息采集模块分别与所述控制装置连接。
36、本发明的人机猜拳方法、装置、存储介质及机器人的有益效果是:响应于用户输入的难度等级,可预先建立不同的难度等级与不同的出拳决策之间的对应关系,根据该对应关系确定与用户输入的难度等级对应的出拳决策。并且根据用户输入的难度等级确定对应的出拳决策需要用到的硬件设备,判断对应的硬件设备是否正确配置,例如若需要采用摄像头拍摄用户的手势数据时,则判断摄像头是否正确配置。若对应的硬件设备正确配置,则采用对应的出拳决策确定机器人的出拳动作。为用户提供多种不同的难度等级,难度等级可与用户在游戏中获胜的难度正相关,提高了人机猜拳游戏的可玩性,用户可逐级挑战不同的难度等级,并且用户可根据实际情况调整机器人的出拳决策,提高了用户在游戏中的体验感。
技术特征:
1.一种人机猜拳方法,其特征在于,包括:
2.根据权利要求1所述的人机猜拳方法,其特征在于,当所述用户输入的难度等级为第一等级时,所述根据对应的所述出拳决策确定机器人的出拳动作包括:
3.根据权利要求1所述的人机猜拳方法,其特征在于,当所述用户输入的难度等级为第二等级,且所述机器人上配置有拍摄用户手势的视觉模块时,所述根据对应的所述出拳决策确定机器人的出拳动作包括:
4.根据权利要求1所述的人机猜拳方法,其特征在于,当所述用户输入的难度等级为第三等级,且所述机器人上配置有拍摄用户手势的视觉模块时,所述根据对应的所述出拳决策确定机器人的出拳动作包括:
5.根据权利要求3所述的人机猜拳方法,其特征在于,当所述用户输入的难度等级为第四等级时,所述根据对应的所述出拳决策确定机器人的出拳动作包括:
6.根据权利要求4所述的人机猜拳方法,其特征在于,当所述用户输入的难度等级为第四等级时,所述根据对应的所述出拳决策确定机器人的出拳动作包括:
7.根据权利要求3至6任一项所述的人机猜拳方法,其特征在于,当所述用户输入的难度等级为第五等级,且所述用户正确佩戴用户采集生物体征信息的生物信息采集模块时;所述根据对应的所述出拳决策确定机器人的出拳动作包括:
8.一种人机猜拳装置,其特征在于,包括:
9.一种计算机可读存储介质,其特征在于,所述存储介质上存储有计算机程序,当所述计算机程序被处理器执行时,实现如权利要求1至7任一项所述的人机猜拳方法。
10.一种机器人,其特征在于,包括动作装置、感知装置和控制装置,所述控制装置用于实现如权利要求1至7任一项所述的人机猜拳方法;
技术总结
本发明提供了一种人机猜拳方法、装置、存储介质及机器人,方法包括:响应于用户输入的难度等级,根据所述用户输入的难度等级判断对应的硬件设备是否配置正确,其中,不同的难度等级分别对应不同的出拳决策;若是,则根据对应的所述出拳决策确定机器人的出拳动作。本发明的人机猜拳方法提供不同的难度等级,根据用户输入的难度等级对应的出拳决策确定机器人的出拳动作,提高了人机猜拳游戏的可玩性和体验感。
技术研发人员:王勃然,罗清元,刘佳平,姜京池,田赫
受保护的技术使用者:台州勃美科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!