一种轻量化实时神经网络辅助的高精度定位方法与流程
本发明涉及神经网络,更具体地说,涉及一种轻量化实时神经网络辅助的高精度定位方法。
背景技术:
1、进入21世纪以后,室内定位技术取得了较快的发展,基于红外、射频识别、超带宽、蓝牙以及地磁等技术的室内定位技术走进了人们的生产和生活领域。这些定位技术一般都需要额外部署定位设备,具有较高的成本。得益于近几年通信技术及互联网技术的发展,wifi技术及智能终端得到了较广泛的推广和应用,这极大地推动了基于wifi技术的室内定位技术的发展。wifi广泛地存在于人们活动的各个场所,人们携带的智能终端可以很方便的连接到周围的ap。这促进了基于wifi的室内定位技术在工业生产和生活等多个领域的深入研究和广泛应用。
2、最常用的非测距定位技术是基于位置指纹的定位技术,指纹定位技术无需考虑接收信号强度(received signal strength indicator,rssi)因建筑物遮挡产生的衰减,且无需事先获取ap的位置,因此得到了较为广泛的研究与应用。指纹法定位一般分为离线建立指纹库和在线定位两步。离线建立指纹库阶段首先要对定位场景进行网格划分设置参考点,在每个参考点采集多个ap的rssi,形成一个rssi指纹向量,整理整个定位场景下的全部指纹向量形成指纹库。在线定位阶段,采集待定位点的rssi指纹向量,与指纹库中的rssi指纹向量进行匹配,通过机器学习方法确定待定位点的位置。
3、在大型商场等人流量大环境复杂的条件下,rssi容易受到人体的干扰,影响定位结果,传统的wifi指纹定位技术主要是利用离线建立指纹库与在线采集的rssi指纹向量匹配进行定位,但rssi容易受到商场人流量的影响,离线建立的指纹库与商场环境人流量较大处采集的rssi难以匹配,定位精度降低。本文提出一种轻量化实时神经网络辅助的高精度定位方法,为大型商场室内定位提供更有效的服务。
技术实现思路
1、要解决的技术问题
2、本发明的目的在于提供一种轻量化实时神经网络辅助的高精度定位方法及贴合工艺,以解决上述背景技术中提出的问题。
3、技术方案
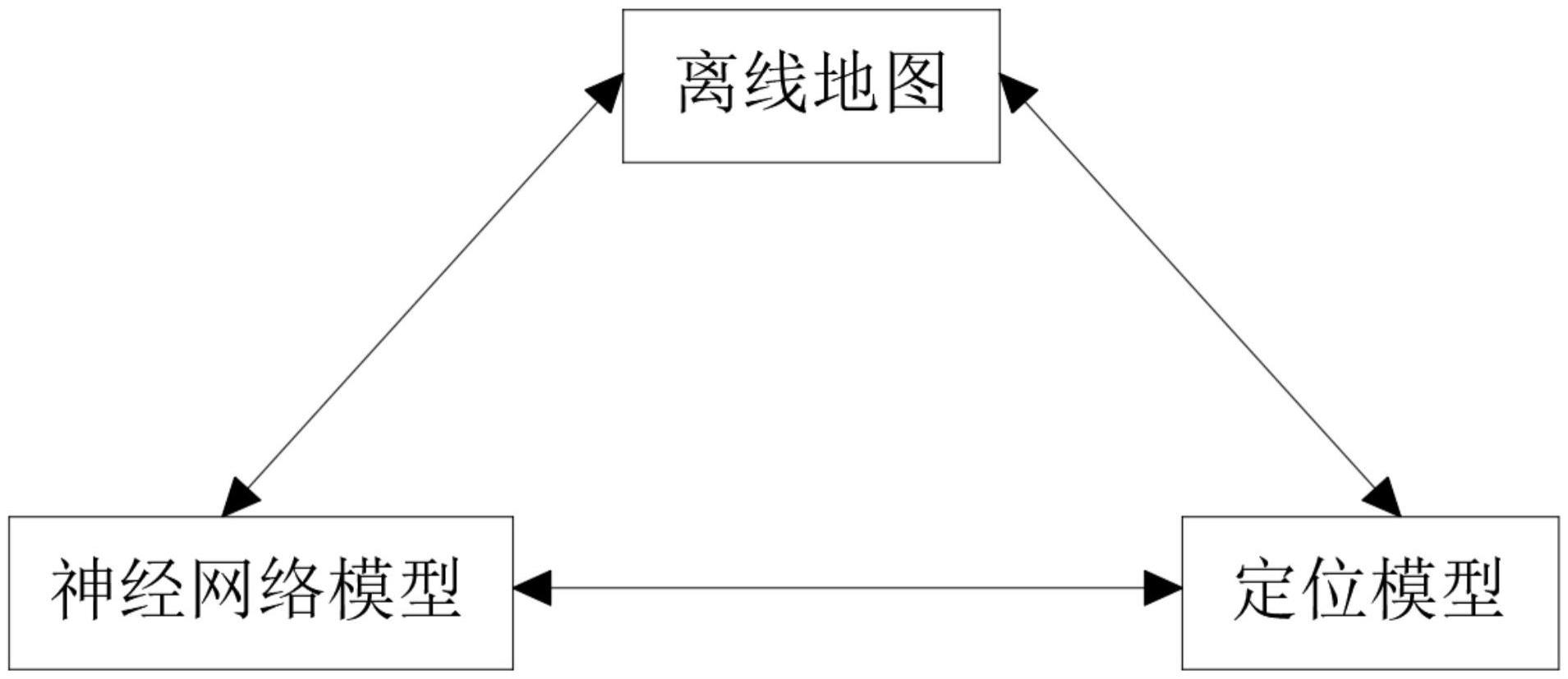
4、一种轻量化实时神经网络辅助的高精度定位方法,该系统由二维离线地图、神经网络模型及定位模型组成;
5、离线地图:对大型商场进行二维地图搭建,将每个店铺商家的广告牌标注在地图上,用户可以在离线状态下进行地图查看;
6、神经网络模型:需要在离线采集阶段于参考点处拍摄四周的图片作为模型训练的样本,并对其进行标注,获得目标的各种信息;
7、定位模型:利用在神经网络模型训练阶段用到的图片拍摄参考点位置,将该位置标记在二维离线地图上,记录标注点和信息定位。
8、优选的,所述神经网络模型对图片中的目标进行矩形框标注,矩形框的位置信息和长宽信息作为模型训练的标签,通过训练模型来找出图像中所有感兴趣的多个目标,并获得这些目标的类别信息和位置信息。
9、优选的,所述神经网络模型所获取的位置信息为位置和大小。
10、优选的,所述定位模型指利用在神经网络模型训练阶段用到的图片拍摄参考点位置,将该位置标记在二维离线地图上,记录下图片里标注的广告牌与参考点连线的线段斜率作为模型训练的标签,标注框的位置信息和长宽信息作为模型训练的样本,训练模型来拟合二维地图上的多条直线,直线的交点是定位位置。
11、优选的,所述离线地图选取合适的参考点,采集参考点四周的图片信息,对采集到的图片进行标注,画出标注框,标注图片中的广告牌,每个标注框有对应的相对于图片的中心点坐标(x,y)以及标注框的长(w)和宽(h),中心点坐标(x,y)以及标注框的长(w)和宽(h)作为模型训练的样本,而该标注框对应的广告牌信息作为模型样本训练的标签。
12、优选的,所述采用目标检测模型的模型结构,输入图片大小为416x416x3,基本结构为:3x3x32的dbl层、3x3x64步长为2的卷积层;res1层、3x3x128步长为2的卷积层;res2层、3x3x256步长为2的卷积层;res8层、3x3x512步长为2的卷积层;res8层、3x3x1024步长为2的卷积层;res4层;5层dbl层;dbl层、1x1的conv卷积层。
13、优选的,所述3x3x32的conv卷积层、bn正则化层和leaky relu激活函数层构成了一层3x3x32的dbl层,resn层由零填充层、dbl层和n个res_unit残差单元组成,res_unit的输出是初始输入和经过两层dbl层输出的和。
14、优选的,所述构建网络结构,下载预训练权重文件可以加速训练中损失函数的收敛,准备训练样本及对应的标签,对训练样本图片的大小统一预处理成416x416x3。
15、优选的,所述准备好样本集d,每一个样本i及对应的标签ai,对样本数据进行归一化处理,初始化权重预处理,模型的损失函数为:
16、
17、优选的,所述模型训练完成后,利用商场拍摄的图片,经过神经网络模型输出得到图片中每一个广告牌的标注框类别、中心点坐标(x,y)、长w和宽h,作为定位模型的输入,最后得到多个角度,辅助完成定位操作。
18、有益效果
19、相比于现有技术,本发明的优点在于:
20、1、神经网络模型对图片中的目标进行矩形框标注,矩形框的位置信息和长宽信息作为模型训练的标签,通过训练模型来找出图像中所有感兴趣的多个目标,并获得这些目标的类别信息和位置信息;神经网络模型所获取的位置信息为位置和大小。
21、2、定位模型指利用在神经网络模型训练阶段用到的图片拍摄参考点位置,将该位置标记在二维离线地图上,记录下图片里标注的广告牌与参考点连线的线段斜率作为模型训练的标签,标注框的位置信息和长宽信息作为模型训练的样本,训练模型来拟合二维地图上的多条直线,直线的交点是定位位置。
22、3、离线地图选取合适的参考点,采集参考点四周的图片信息,对采集到的图片进行标注,画出标注框,标注图片中的广告牌,每个标注框有对应的相对于图片的中心点坐标(x,y)以及标注框的长(w)和宽(h),中心点坐标(x,y)以及标注框的长(w)和宽(h)作为模型训练的样本,而该标注框对应的广告牌信息作为模型样本训练的标签。
23、4、能直接使用商场背景信息进行定位。
24、5、无需配置ap无线接入点。
25、6、轻量化、实时。
技术特征:
1.一种轻量化实时神经网络辅助的高精度定位方法,其特征在于,该系统由二维离线地图、神经网络模型及定位模型组成;
2.根据权利要求1所述的一种轻量化实时神经网络辅助的高精度定位方法,其特征在于:所述
3.根据权利要求1所述的一种轻量化实时神经网络辅助的高精度定位方法,其特征在于:所述神经网络模型所获取的位置信息为位置和大小。
4.根据权利要求1所述的一种轻量化实时神经网络辅助的高精度定位方法,其特征在于:所述定位模型指利用在神经网络模型训练阶段用到的图片拍摄参考点位置,将该位置标记在二维离线地图上,记录下图片里标注的广告牌与参考点连线的线段斜率作为模型训练的标签,标注框的位置信息和长宽信息作为模型训练的样本,训练模型来拟合二维地图上的多条直线,直线的交点是定位位置。
5.根据权利要求1所述的一种轻量化实时神经网络辅助的高精度定位方法,其特征在于:所述离线地图选取合适的参考点,采集参考点四周的图片信息,对采集到的图片进行标注,画出标注框,标注图片中的广告牌,每个标注框有对应的相对于图片的中心点坐标(x,y)以及标注框的长(w)和宽(h),中心点坐标(x,y)以及标注框的长(w)和宽(h)作为模型训练的样本,而该标注框对应的广告牌信息作为模型样本训练的标签。
6.根据权利要求1所述的一种轻量化实时神经网络辅助的高精度定位方法,其特征在于:所述采用目标检测模型的模型结构,输入图片大小为416x416x3,基本结构为:3x3x32的dbl层、3x3x64步长为2的卷积层;res1层、3x3x128步长为2的卷积层;res2层、3x3x256步长为2的卷积层;res8层、3x3x512步长为2的卷积层;res8层、3x3x1024步长为2的卷积层;res4层;5层dbl层;dbl层、1x1的conv卷积层。
7.根据权利要求1所述的一种轻量化实时神经网络辅助的高精度定位方法,其特征在于:所述3x3x32的conv卷积层、bn正则化层和leaky relu激活函数层构成了一层3x3x32的dbl层,resn层由零填充层、dbl层和n个res_unit残差单元组成,res_unit的输出是初始输入和经过两层dbl层输出的和。
8.根据权利要求1所述的一种轻量化实时神经网络辅助的高精度定位方法,其特征在于:构建网络结构,下载预训练权重文件可以加速训练中损失函数的收敛,准备训练样本及对应的标签,对训练样本图片的大小统一预处理成416x416x3。
9.根据权利要求1所述的一种轻量化实时神经网络辅助的高精度定位方法,其特征在于:准备好样本集d,每一个样本i及对应的标签ai,对样本数据进行归一化处理,初始化权重预处理,模型的损失函数为
10.根据权利要求1所述的一种轻量化实时神经网络辅助的高精度定位方法,其特征在于:模型训练完成后,利用商场拍摄的图片,经过神经网络模型输出得到图片中每一个广告牌的标注框类别、中心点坐标(x,y)、长w和宽h,作为定位模型的输入,最后得到多个角度,辅助完成定位操作。
技术总结
本发明公开了一种轻量化实时神经网络辅助的高精度定位方法,属于神经网络技术领域。模型训练完成后,利用商场拍摄的图片,经过神经网络模型输出得到图片中每一个广告牌的标注框类别、中心点坐标(x,y)、长w和宽h,作为定位模型的输入,最后得到与正北方向的多个夹角,每一个广告牌对应一个夹角,利用二维地图上的广告牌位置信息,在二维地图上画出经过每一个广告牌的直线,该直线的斜率和模型输出的每一个广告牌的夹角对应,在二维地图上多条直线相交得到多个交点,取多个交点的中心位置作为本次定位的最终位置,从而完成定位操作。
技术研发人员:肖冰,张友波,林勇明,刘崇
受保护的技术使用者:深圳市源流科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!