一种应用于无人机航拍图像的罂粟智能识别方法及系统与流程
本发明属于图像识别,具体涉及一种应用于无人机航拍图像的罂粟智能识别方法及系统。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
2、无人机航拍罂粟原植物检测主要依赖专家经验,即判图人员需要专业的罂粟甄别培训,在图像中依据罂粟特征信息确定其所在位置。然而,由于不同生长期的罂粟原植物,其表现的外形特征不尽相同;同时,为了躲避禁毒人员排查,一般选择种植的罂粟环境也较为复杂,如在偏僻的院落或田间种植、靠近墙壁处种植、废弃厂区、房前屋后、与其他植物混合种植(套种)等;还有在人迹罕至的沟壑、滩涂、山地、林地等易于隐蔽地点种植。增加了人工视觉检测航拍图像罂粟原植物难度,且实际工作显示一位熟练的专家,平均至少需要10分钟检测1张无人机图像中包含的所有罂粟原植物目标。另外,无人机图像均为高分辨率图像,且无人机飞行任务较多时,采集的图像数量往往巨大,长时间高负荷工作,容易增加专业人员的主观漏检、误检风险,致使部分非法罂粟原植物成为漏网之鱼,降低禁毒工作成效。因此,迫切需要新技术、新方法,辅助禁毒工作人员准确检测航拍罂粟图像,有效提高工作效率和检测精度。
3、深度学习作为人工智能的重要方法之一,将图像浅层特征(纹理)抽象至高层特征(轮廓),进而完成识别任务,无需手动(人为)提取特征过程,采用端到端的学习方式,已成功应用于图像目标检测、语义分割、场景分割等领域。目前基于深度学习的目标检测与识别算法大致分为以下两类:基于区域建议的目标检测与识别算法,如r-cnn,fast-r-cnn,faster-r-cnn;基于回归的目标检测与识别算法,如yolo,ssd。然而,现有的目标检测方法都是针对pascal voc、coco、image net等通用数据集的目标检测,这些目标往往尺度较大,相对容易检测。而航拍图像中罂粟原植物目标具有尺度小、背景信息干扰严重等特点,增加了识别难度。
技术实现思路
1、为了解决上述问题,本发明提出了一种应用于无人机航拍图像的罂粟智能识别方法及系统,本发明实现利用深度学习算法辅助人工排查航拍图像罂粟目标;解决复杂背景环境下的罂粟目标检测问题。
2、根据一些实施例,本发明的第一方案提供了一种应用于无人机航拍图像的罂粟智能识别方法,采用如下技术方案:
3、一种应用于无人机航拍图像的罂粟智能识别方法,包括:
4、利用无人机获取罂粟航拍图像,并进行预处理;
5、基于预处理后的罂粟航拍图像,利用预先训练好的罂粟植物目标检测模型进行识别,得到罂粟识别结果;
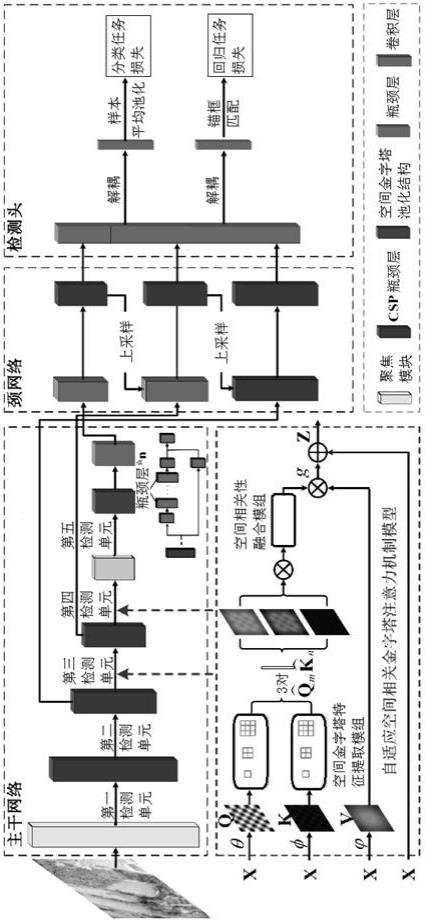
6、其中,所述罂粟植物目标检测模型,包括主干网络、颈网络和检测头网络;所述主干网络包括五个检测单元和一个空间金字塔池化网络;
7、第一检测单元为focus模块;第二检测单元以及第五检测单元均是由cspbottleneck和下采样层组成;第三检测单元以及第四单元是自适应空间相关金字塔注意力机制模型。
8、根据一些实施例,本发明的第二方案提供了一种应用于无人机航拍图像的罂粟智能识别系统,采用如下技术方案:
9、一种应用于无人机航拍图像的罂粟智能识别系统,包括:
10、数据采集处理模块,被配置为利用无人机获取罂粟航拍图像,并进行预处理;
11、罂粟识别模块,被配置为基于预处理后的罂粟航拍图像,利用预先训练好的罂粟植物目标检测模型进行识别,得到罂粟识别结果;
12、其中,所述罂粟植物目标检测模型,包括主干网络、颈网络和检测头网络;所述主干网络包括五个检测单元和一个空间金字塔池化网络;
13、第一检测单元为focus模块;第二检测单元以及第五检测单元均是由cspbottleneck和下采样层组成;第三检测单元以及第四单元是自适应空间相关金字塔注意力机制模型。
14、根据一些实施例,本发明的第三方案提供了一种计算机可读存储介质。
15、一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如上述第一个方面所述的一种应用于无人机航拍图像的罂粟智能识别方法中的步骤。
16、根据一些实施例,本发明的第四方案提供了一种计算机设备。
17、一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述第一个方面所述的一种应用于无人机航拍图像的罂粟智能识别方法中的步骤。
18、与现有技术相比,本发明的有益效果为:
19、本发明设计自适应空间相关金字塔注意力机制模型,在该模型中,构建空间金字塔特征提取模组,抽取航拍特征图像的多尺度空间特征信息;构建空间相关特征融合模组,对多尺度空间相关特征矩阵信息进行重校准,然后融合校准后的多尺度空间特征矩阵,生成空间位置注意力矩阵。
技术特征:
1.一种应用于无人机航拍图像的罂粟智能识别方法,其特征在于,包括:
2.如权利要求1所述的一种应用于无人机航拍图像的罂粟智能识别方法,其特征在于,所述利用无人机获取罂粟航拍图像,并进行预处理,具体为:
3.如权利要求1所述的一种应用于无人机航拍图像的罂粟智能识别方法,其特征在于,所述自适应空间相关金字塔注意力机制模型,具体为:
4.如权利要求3所述的一种应用于无人机航拍图像的罂粟智能识别方法,其特征在于,所述空间金字塔特征提取模组分别采用1x1、3x3、5x5大小的核的平均池化分支,获取罂粟目标的上下文背景信息;
5.如权利要求1所述的一种应用于无人机航拍图像的罂粟智能识别方法,其特征在于,所述自适应空间相关金字塔注意力机制模型提取罂粟特征目标的空间相关性,具体为:
6.如权利要求5所述的一种应用于无人机航拍图像的罂粟智能识别方法,其特征在于,所述空间相关性融合模组得到多尺度空间特征,具体为:
7.如权利要求1所述的一种应用于无人机航拍图像的罂粟智能识别方法,其特征在于,所述空间金字塔池化网络是利用融合多尺度特征图提高主干网络的特征提取能力;
8.一种应用于无人机航拍图像的罂粟智能识别系统,其特征在于,包括:
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-7中任一项所述的一种应用于无人机航拍图像的罂粟智能识别方法中的步骤。
10.一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1-7中任一项所述的一种应用于无人机航拍图像的罂粟智能识别方法中的步骤。
技术总结
本发明属于图像识别领域,提供了一种应用于无人机航拍图像的罂粟智能识别方法及系统,包括利用无人机获取罂粟航拍图像,并进行预处理;基于预处理后的罂粟航拍图像,利用预先训练好的罂粟植物目标检测模型进行识别,得到罂粟识别结果;其中,所述罂粟植物目标检测模型,包括主干网络、颈网络和检测头网络;所述主干网络包括五个检测单元和一个空间金字塔池化网络;所述第一检测单元为Focus模块;所述第二检测单元以及第五检测单元均是由CSP Bottleneck和下采样层组成;所述第三检测单元以及第四单元是自适应空间相关金字塔注意力机制模型。本发明提出的模型能够处理复杂背景下的罂粟原植物目标识别问题,减少漏检率。
技术研发人员:谷永辉,张庆贤,梁春丽
受保护的技术使用者:山东捷讯通信技术有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!