一种电力作业现场全景安监覆盖优化方法与流程
本发明涉及视觉安监,尤其涉及一种电力作业现场全景安监覆盖优化方法。
背景技术:
1、电力现场作业安监可应用摄像头视频分析结果对作业过程进行监管,确保人员到位,措施到位,执行到位。固定摄像头和移动摄像头的视频数据融合是当前视频安监技术的主要手段,但识别效果与摄像头的布置方案有密切的关系。但目前,电力作业内容未与安监需求有机协同,其摄像头的布置未能实现对作业现场全景的有效覆盖,导致现场安监的有效性大大降低。
技术实现思路
1、本发明提供了一种电力作业现场全景安监覆盖优化方法,解决了电力作业内容未与摄像头布置有机协同,其摄像头的布置未能实现对作业现场全景的有效覆盖,导致现场安监的有效性大大降低的技术问题。
2、有鉴于此,本发明第一方面提供了一种电力作业现场全景安监覆盖优化方法,包括以下步骤:
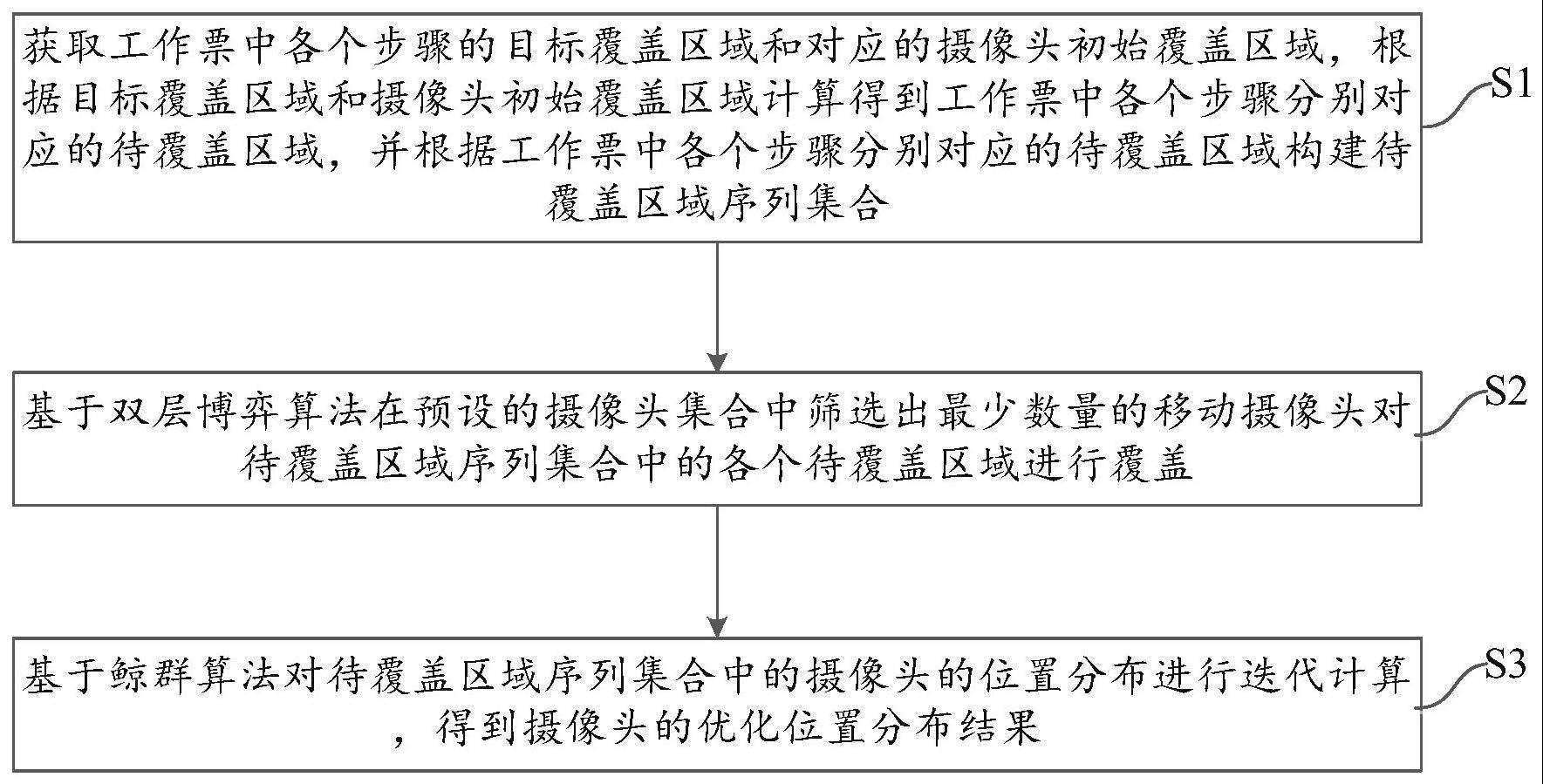
3、获取工作票中各个步骤的目标覆盖区域和对应的摄像头初始覆盖区域,根据所述目标覆盖区域和所述摄像头初始覆盖区域计算得到工作票中各个步骤分别对应的待覆盖区域,并根据工作票中各个步骤分别对应的待覆盖区域构建待覆盖区域序列集合;
4、基于双层博弈算法在预设的摄像头集合中筛选出最少数量的移动摄像头对所述待覆盖区域序列集合中的各个待覆盖区域进行覆盖;
5、基于鲸群算法对所述待覆盖区域序列集合中的摄像头的位置分布进行迭代计算,得到摄像头的优化位置分布结果。
6、优选地,获取工作票中各个步骤的目标覆盖区域和对应的摄像头初始覆盖区域,根据所述目标覆盖区域和所述摄像头初始覆盖区域计算得到工作票中各个步骤分别对应的待覆盖区域,并根据工作票中各个步骤分别对应的待覆盖区域构建待覆盖区域序列集合的步骤具体为:
7、通过服务器接受工作票后,解析工作票中的各个步骤以及其分别对应的目标覆盖区域,记为sj,j∈[1,n],j表示第j个步骤,n表示步骤数,其中,工作票中包含所有待检修设备工作区域的集合;
8、获取工作票中各个步骤对应的摄像头初始覆盖区域,记为sc(j),j∈[1,n];
9、根据所述目标覆盖区域和所述摄像头初始覆盖区域计算得到工作票中各个步骤分别对应的待覆盖区域为:
10、snc(j)=sj-sc(j)
11、式中,snc(j)为第j个步骤的待覆盖区域;
12、根据工作票中各个步骤分别对应的待覆盖区域构建待覆盖区域序列集合为:
13、snc={snc(1),snc(2),……,snc(n)}。
14、优选地,本方法还包括:
15、获取摄像头的视界参数,定义为vi=<pi,αi,ri,fi,vi>,其中,pi为摄像头的位置坐标,αi为摄像头的最大扫描视角、ri为摄像头的有效感知视界半径、fi为摄像头的扫描视角的角平分线、vi为摄像头视界的最大覆盖区域,i∈[1,m1+m2]为摄像头序号,m1为电力作业现场固定摄像头的数量,m2为移动摄像头的数量;
16、将所有摄像头按照摄像头视界的最大覆盖区域从大到小排序,形成摄像头集合序列
17、优选地,基于双层博弈算法在预设的摄像头集合中筛选出最少数量的移动摄像头对所述待覆盖区域序列集合中的各个待覆盖区域进行覆盖的步骤具体包括:
18、将所述待覆盖区域序列集合与摄像头集合视为博弈参与人,记k,k=1,2,……,h,h为博弈参与人总数;
19、令uk为第k个参与人的总支付,u={u1,u2,……,uh}为h个参与人的总支付集合,计算总支付集合为:
20、u=uk[(t11,t12,…,t1m),…,(tk1,tk2,…,tkm),…,(th1,th2,…,thm)]
21、式中,(tk1,tk2,…,tkm)为第k个参与人在多维m均衡情况下的最优策略,其中,多维m包括摄像头位置及其对应的覆盖率两个维度;
22、在各博弈策略空间内随机生成初始可行策略t0=(t10,t20,…,th0),记tk-1为除博弈参与人k以外的其他博弈参与人的策略集合,在任意第k个博弈参与人的总支付uk为目标,固定tk-1不变的情况下,在属于该博弈方的策略空间内进行单目标优化,求解该博弈方的策略空间内的博弈参与人的最小总支付,并得出对应的均衡解,根据所述均衡解在摄像头集合中筛选出对应的移动摄像头,从而对所述待覆盖区域序列集合中的各个待覆盖区域进行覆盖。
23、优选地,基于鲸群算法对所述待覆盖区域序列集合中的摄像头的位置分布进行迭代计算,得到摄像头的优化位置分布结果的步骤具体包括:
24、将所述待覆盖区域序列集合中的摄像头作为鲸群中的个体,将所有个体随机分布至第j个步骤的待覆盖区域中,并在第j个步骤的待覆盖区域中生成对应的摄像头坐标位置,记为
25、将每个个体代入到适应度函数中,计算每个个体的适应度值,并确定最高适应度值对应的个体为当前最佳位置,其中,适应度函数为:
26、
27、式中,为覆盖率,为最大覆盖率;
28、通过如下更新公式更新下一次迭代时的个体的位置,由此得到新的鲸群位置:
29、其中,第一阶段为包围捕食阶段,其更新公式为:
30、
31、
32、式中,为包围步长,p表示当前迭代次数,为个体当前最佳位置,均为系数向量,其中,为个体位置,为个体更新后的位置;
33、第二阶段为气泡网攻击阶段,气泡网攻击阶段包括收缩围捕和螺旋捕猎,收缩围捕和螺旋捕猎的更新公式分别为:
34、
35、式中,b为决定螺旋形状的常数,l∈[-1,1];
36、第三阶段为随机搜索阶段,
37、
38、
39、式中,为随机位置;
40、根据更新公式得到每一次迭代的个体的位置,直至个体的位置达到最优或迭代次数达到预设最大迭代次数,迭代结束,并输出相应的个体的位置为摄像头的优化位置分布结果。
41、从以上技术方案可以看出,本发明具有以下优点:
42、本发明通过工作票中各个步骤的目标覆盖区域和对应的摄像头初始覆盖区域,计算得到工作票中各个步骤分别对应的待覆盖区域,并构建待覆盖区域序列集合,通过双层博弈算法筛选出最少数量的移动摄像头对待覆盖区域序列集合中的各个待覆盖区域进行覆盖,还通过鲸群算法对待覆盖区域序列集合中的摄像头的位置分布进行优化,得到摄像头的优化位置分布结果,从而将电力作业内容与摄像头布置有机协同,并利用较少的摄像头的布置即可实现对作业现场全景的有效覆盖,降低了安检成本,同时,还提高了现场安监的有效性。
技术特征:
1.一种电力作业现场全景安监覆盖优化方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的电力作业现场全景安监覆盖优化方法,其特征在于,获取工作票中各个步骤的目标覆盖区域和对应的摄像头初始覆盖区域,根据所述目标覆盖区域和所述摄像头初始覆盖区域计算得到工作票中各个步骤分别对应的待覆盖区域,并根据工作票中各个步骤分别对应的待覆盖区域构建待覆盖区域序列集合的步骤具体为:
3.根据权利要求2所述的电力作业现场全景安监覆盖优化方法,其特征在于,还包括:
4.根据权利要求3所述的电力作业现场全景安监覆盖优化方法,其特征在于,基于双层博弈算法在预设的摄像头集合中筛选出最少数量的移动摄像头对所述待覆盖区域序列集合中的各个待覆盖区域进行覆盖的步骤具体包括:
5.根据权利要求4所述的电力作业现场全景安监覆盖优化方法,其特征在于,基于鲸群算法对所述待覆盖区域序列集合中的摄像头的位置分布进行迭代计算,得到摄像头的优化位置分布结果的步骤具体包括:
技术总结
本发明涉及视觉安监技术领域,公开了一种电力作业现场全景安监覆盖优化方法,通过工作票中各个步骤的目标覆盖区域和对应的摄像头初始覆盖区域,计算得到工作票中各个步骤分别对应的待覆盖区域,并构建待覆盖区域序列集合,通过双层博弈算法筛选出最少数量的移动摄像头对待覆盖区域序列集合中的各个待覆盖区域进行覆盖,还通过鲸群算法对待覆盖区域序列集合中的摄像头的位置分布进行优化,得到摄像头的优化位置分布结果,从而将电力作业内容与摄像头布置有机协同,并利用较少的摄像头的布置即可实现对作业现场全景的有效覆盖,降低了安检成本,同时,还提高了现场安监的有效性。
技术研发人员:钟前辉,黎艺苗,陈学台,欧郁强,黄观荣,黄必众,杨德奖,李敏,张宝星
受保护的技术使用者:广东电网有限责任公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!