一种基于DCNN的高速公路事故判别方法与流程
本发明涉及交通事故判别领域,尤其是一种基于高速公路监控视频利用深度卷积神经网络进行事故判别的方法。
背景技术:
1、现有交通事故检测研究从使用数据的角度可分为三种类型,即基于宏观交通流数据的方法,基于单车姿态数据的方法以及基于视频数据的方法。基于视频的道路事故检测方法是目前主流,主要采用运动检测、特征提取和特征分析三个步骤完成。提取的特征包括车辆的速度、加速度、面积、位置和方向,并将这些特征与预定义的阈值进行比较,以检测事故,精度较低。
2、近年来根据轨迹数据的应用研究逐渐增多,但还不够深入。因此,本发明提出一种基于视频提取事故车辆在一段时间内的轨迹信息对交通事故进行检测和分类的方法,结合深度卷积神经网络对交通事故进行六种类型的判别分类,提高了事故检测和分类的准确性和可靠性。
技术实现思路
1、本发明的目的在于提供一种基于高速公路监控视频利用深度卷积神经网络进行事故判别的方法,能够提取并优化完整的车辆轨迹,识别六种类型交通事故,提高车辆轨迹提取的准确度以及事故检测分类的可靠性。
2、为达成上述目的,本发明所采用的技术方案如下:
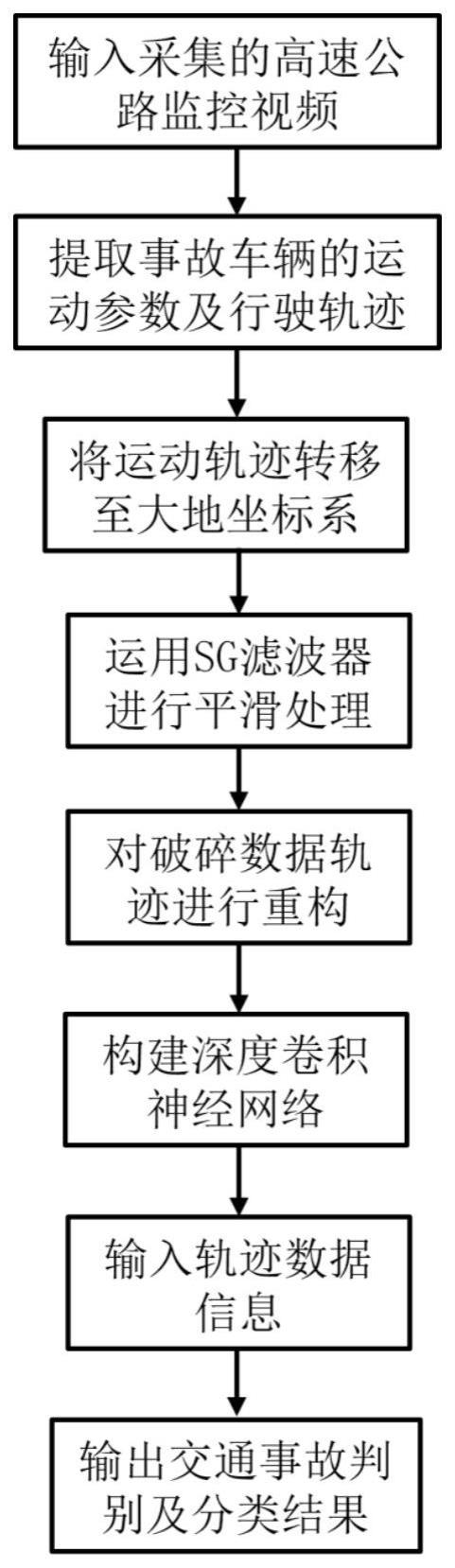
3、s1、运用yolov7目标检测算法和sort目标跟踪算法提取高速公路监控视频中的车辆运动参数及行驶轨迹;
4、s2、运用kd-tree算法对s1中检测跟踪提取的轨迹数据进行清理、变换、重构;
5、s3、构建基于多特征离散时间序列数据的深度卷积神经网络模型,将交通事故进行分类;
6、s4、将经s2优化过后的轨迹数据输入至步骤s3的深度卷积神经网络模型中进行训练;
7、s5、将车辆轨迹数据输入至s4训练好的模型中,判别属于何种事故类型。
8、进一步地,所述步骤s1中,共捕获不低于500个训练图形样本用于车辆特征学习,连续图形的时间间隔为120帧,在官方coco数据集训练的权重文件的基础上,通过基于yolov7框架的迁移学习方法对本专利收集的交通视频的车辆特征进行训练。
9、进一步地,所述步骤s1中,采用sort算法找到连续帧内的最优车辆匹配,实现各车辆的初始轨迹数据提取。
10、进一步地,所述步骤s2中,将步骤s1得到的初始轨迹数据从像素坐标转移到大地测量坐标,运用sg(savitzky-golay)滤波器对中心点坐标进行两次平滑处理。
11、进一步地,所述步骤s2中,采用kd-tree算法和三次样条插值方法对轨迹数据进行重构,区分完整的轨迹数据和破碎的轨迹数据,并将假设属于同一车辆的破碎的轨迹数据连接成完整的轨迹数据。
12、进一步地,所述步骤s3中,模型输入为两辆事故车辆的18个相关变量,即两辆车的瞬时速度、平均速度、瞬时加速度、平均加速度、加速度标准差、速度标准差、加速度方差、速度方差和方位角。输出为正常驾驶及五种事故类型的概率,隐藏层由四个覆盖层、一个平面层和两个完全连接层组成。
13、进一步地,所述步骤s3中,覆盖层使用卷积和池化计算来处理原始输入,平面层将多维输入转换为一维数组,全连接层提取分类特征。
14、进一步地,所述步骤s4中,将原始数据分为训练数据集、验证数据集和测试数据集。将训练数据集输入模型,对所提出的模型进行训练,利用验证数据集对模型进行验证,找到损失最小或精度最高的模型,并利用测试数据集评估模型的性能。为了解决过拟合问题,使数据利用率最大化,按照8:1:1的方法展开交叉验证的。
15、进一步地,所述步骤s5中,将数据输入至模型中得到交通事故的判别结果,即c0、c1、c2、c3、c4和c5六种类型,并且运用验证集验证模型的有效性,运用测试集报告模型精度。
16、本发明的有益效果为:
17、(1)本发明根据两辆事故车辆在一段时间内的轨迹信息对交通事故进行检测和分类,不仅利用相关车辆的位置信息,还捕捉事故车辆在一段时间内的发展趋势,可提高检测分类的可靠性。
18、(2)本发明将深度卷积神经网络运用于交通事故的检测和分类,使事故识别模型具有较好的分类性能,结果显示,基于多车的事故检测和分类的准确性都较高。
19、(3)本发明引入结合轨迹数据重建技术,在检测跟踪车辆轨迹的基础上,对破碎的轨迹数据进行重构,能够获取更准确且连续的车辆运行轨迹数据。
20、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在说明书以及附图中所特别指出的结构来实现和获得。
技术特征:
1.一种基于dcnn的高速公路事故判别方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于dcnn的高速公路事故判别方法,其特征在于:所述步骤s1中,共捕获不低于500个训练图形样本用于车辆特征学习,连续图形的时间间隔为120帧,在官方coco数据集训练的权重文件的基础上,通过基于yolov7框架的迁移学习方法对本专利收集的交通视频的车辆特征进行训练。
3.根据权利要求1所述的一种基于dcnn的高速公路事故判别方法,其特征在于:所述步骤s1中,采用sort算法找到连续帧内的最优车辆匹配,实现各车辆的初始轨迹数据提取。
4.根据权利要求1所述的一种基于dcnn的高速公路事故判别方法,其特征在于:所述步骤s2中,将步骤s1得到的初始轨迹数据从像素坐标转移到大地测量坐标,运用sg滤波器对中心点坐标进行两次平滑处理。
5.根据权利要求1所述的一种基于dcnn的高速公路事故判别方法,其特征在于:所述步骤s2中,采用kd-tree算法和三次样条插值方法对轨迹数据进行重构,区分完整的轨迹数据和破碎的轨迹数据,并将假设属于同一车辆的破碎的轨迹数据连接成完整的轨迹数据。
6.根据权利要求1所述的一种基于dcnn的高速公路事故判别方法,其特征在于:所述步骤s3中,模型输入为两辆事故车辆的18个相关变量,即两辆车的瞬时速度、平均速度、瞬时加速度、平均加速度、加速度标准差、速度标准差、加速度方差、速度方差和方位角。输出为正常驾驶及五种事故类型的概率,隐藏层由四个覆盖层、一个平面层和两个完全连接层组成。
7.根据权利要求6所述的一种基于dcnn的高速公路事故判别方法,其特征在于:所述步骤s3中,覆盖层使用卷积和池化计算来处理原始输入,平面层将多维输入转换为一维数组,全连接层提取分类特征。
8.根据权利要求1所述的一种基于dcnn的高速公路事故判别方法,其特征在于:所述步骤s4中,将原始数据分为训练数据集、验证数据集和测试数据集。将训练数据集输入模型,对所提出的模型进行训练,利用验证数据集对模型进行验证,找到损失最小或精度最高的模型,并利用测试数据集评估模型的性能。
9.根据权利要求1所述的一种基于dcnn的高速公路事故判别方法,其特征在于:所述步骤s5中,将数据输入至模型中得到交通事故的判别结果,即c0、c1、c2、c3、c4和c5六种类型,并且运用验证集验证模型的有效性,运用测试集报告模型精度。
技术总结
本发明公开了一种基于深度卷积神经网络的高速公路交通事故判别方法,其包括从监控视频中提取轨迹、轨迹重构以及事故判别等内容;所述轨迹提取由YOLOv7算法及SORT算法实现,轨迹重构由KD‑Tree算法实现,并构建基于轨迹数据的DCNN事故分类模型,根据输入的轨迹信息输出相应的判别结果。本发明可以解决现有的基于视频数据检测交通事故精确度较低的问题。
技术研发人员:孙健
受保护的技术使用者:江苏宁杭高速公路有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!